Clear Sky Science · it
Controllo predittivo del modello decentralizzato in tempo reale per il trasporto cooperativo di oggetti con più robot: validazione sperimentale
I robot uniscono le forze per portare il carico
Immaginate un magazzino dove piccoli robot mobili, non persone, collaborano per spostare scatole intorno a strette curve e tra scaffali—senza urtarsi a vicenda né sbattere contro ostacoli. Questo articolo mostra come due robot di questo tipo possano condividere un oggetto pesante e muoverlo in modo fluido e sicuro in tempo reale, anche quando i loro sensori sono rumorosi e la loro percezione dell’ambiente è imperfetta.
Perché condividere il carico è difficile
Far sì che più robot trasportino lo stesso oggetto è molto più complesso che dire a un singolo robot dove andare. Le macchine devono concordare dove piazzare il carico condiviso, mantenere una distanza di sicurezza tra loro e evitare di urtare pareti o ostacoli, il tutto reagendo rapidamente ai cambiamenti. Gli approcci tradizionali spesso si affidano a un unico computer centrale che vede tutto e dice a ciascun robot cosa fare. Questa configurazione può essere fragile: se il cervello centrale o il collegamento di comunicazione vengono meno, l’intera squadra può bloccarsi. Gli autori invece esplorano un approccio «decentralizzato» in cui ogni robot prende le proprie decisioni ma si comporta comunque come parte di un team coordinato.
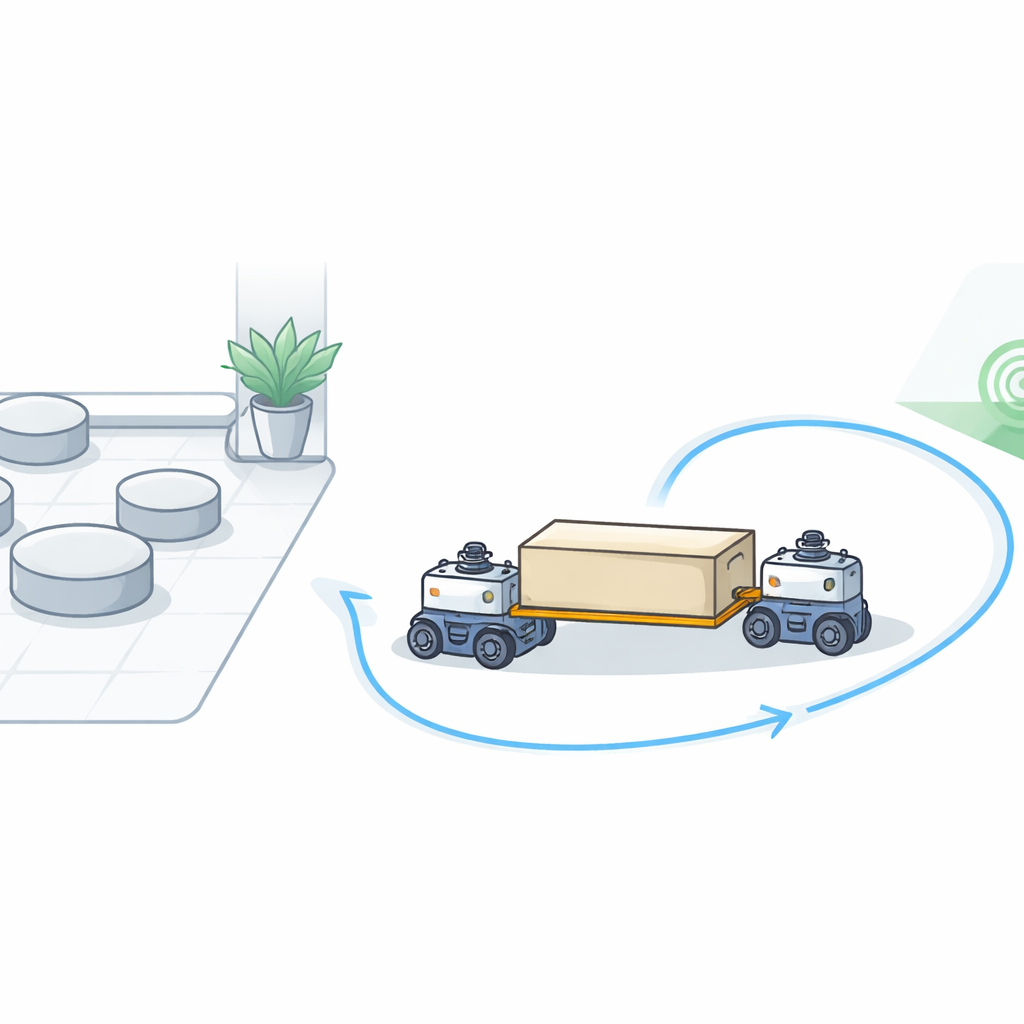
Una coppia di robot nel mondo reale
Per mettere alla prova le loro idee, i ricercatori hanno costruito un allestimento fisico usando due piccoli robot commerciali noti come TurtleBot3. Ogni robot ha due ruote motrici e sostiene una porzione di una piattaforma in acrilico leggera. I due robot sono collegati a questa piattaforma condivisa tramite giunti appositamente progettati che possono sia ruotare sia allungarsi, imitando come un vero oggetto potrebbe flettersi o spostarsi quando viene portato in squadra. I robot si muovono in un’area interna modesta delle dimensioni di un soggiorno, segnata con tag visivi che aiutano una telecamera dall’alto a determinare dove si trova tutto.
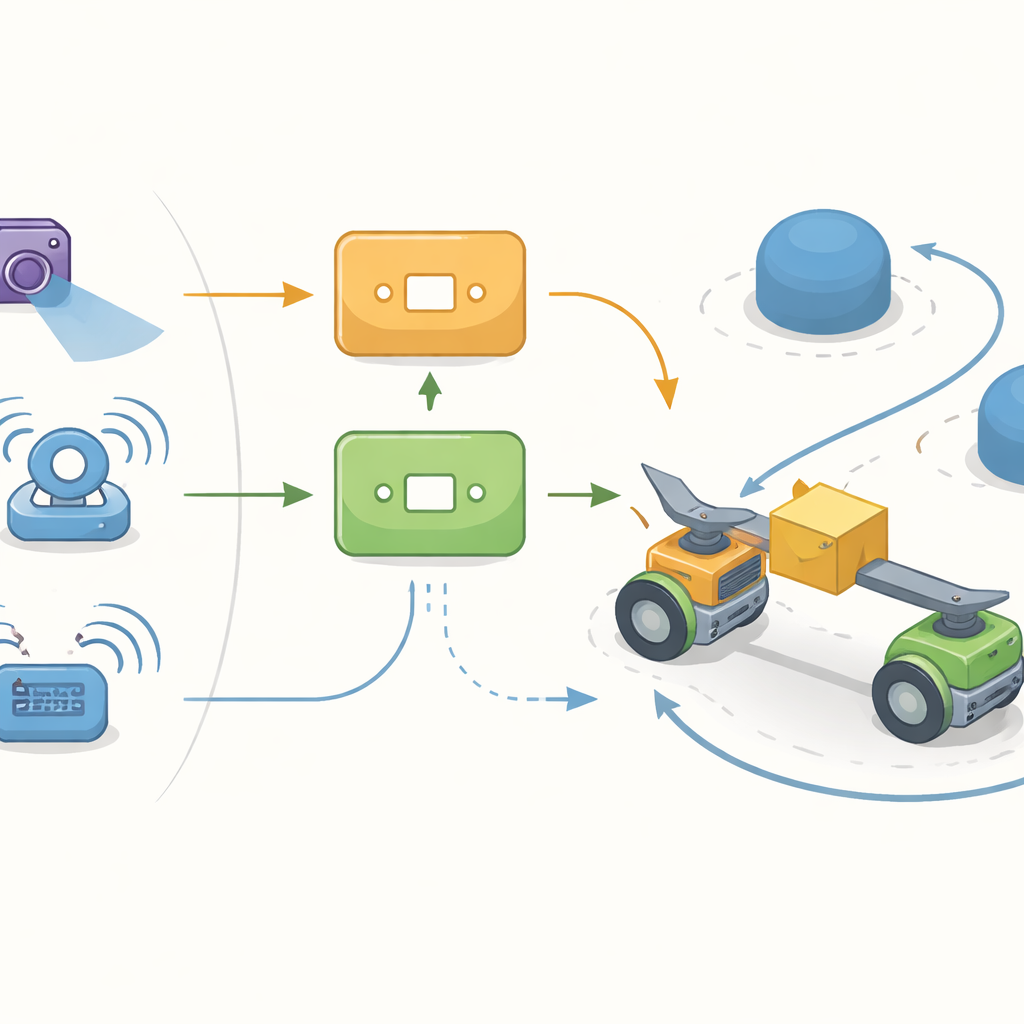
Vedere e decidere in movimento
La visione da sola non è perfetta: la telecamera dall’alto può perdere di vista un robot per brevi istanti e le sue misure sono ritardate. Per tenere traccia del carico condiviso in tempo reale, il sistema fonde le informazioni della telecamera con le letture degli encoder delle ruote e dei piccoli sensori di movimento su ciascun robot. Un metodo matematico di filtraggio leviga questi segnali in una stima singola e affidabile di dove si trova l’oggetto trasportato e di come si sta muovendo. Su questo livello di percezione, ogni robot esegue il proprio controllore predittivo. Invece di reagire soltanto al momento presente, il controllore guarda per un breve intervallo di tempo nel futuro, valutando le possibili scelte di movimento rispetto ai limiti di sicurezza come vincoli di velocità, spaziatura tra i robot e la distanza minima consentita dagli ostacoli.
Cooperazione senza conversazioni continue
Pur dovendo cooperare, i robot non comunicano continuamente. Si scambiano informazioni solo quando la loro distanza relativa o l’orientamento deviano troppo da quanto previsto. Tra questi burst di comunicazione, ogni robot usa l’ultima stima del partner e inserisce margini di sicurezza per evitare collisioni. Il controllore regola anche le proprie priorità al volo: quando la traiettoria desiderata curva bruscamente o ci sono ostacoli nelle vicinanze, si concentra automaticamente di più sul mantenere la rotta pianificata e tenere la formazione compatta, e un po’ meno sul rendere il moto il più dolce possibile. Quando la traiettoria si raddrizza, queste priorità si rilassano per ridurre lo sforzo sui motori e mantenere il movimento fluido.
Mettere il metodo alla prova
Il team ha sottoposto i robot a una serie di prove: spostamenti da un punto all’altro, tracciamento di linee rette e cerchi, e il seguimento di una traiettoria a forma di otto sia con che senza ostacoli. In ciascun caso hanno confrontato una versione base del controllore con quella adattiva che riesce a ritunare le proprie priorità durante l’esecuzione. La strategia adattiva ha mantenuto la piattaforma trasportata molto più vicina alla traiettoria desiderata—migliorando la precisione di circa un quinto o un terzo—pur rispettando tutti i limiti di sicurezza su spaziatura, estensione dei giunti e su quanto velocemente le ruote potevano girare o cambiare velocità. Anche su un computer modesto, ogni robot riusciva a completare i calcoli abbastanza rapidamente da aggiornare le decisioni di moto dieci volte al secondo, lasciando margine per l’operazione in tempo reale.
Cosa significa per le future squadre di robot
Per i non specialisti, il messaggio principale è che ora è fattibile per team di robot piccoli e poco costosi trasportare carichi condivisi in modo sicuro e preciso senza dipendere da un unico controllore centrale. Fondendo dati della telecamera e sensori a bordo e lasciando che ogni robot predica e ottimizzi il proprio moto parlando col partner solo quando necessario, il sistema ottiene un trasporto fluido e accurato anche in spazi ingombri. Questo tipo di lavoro di squadra decentralizzato e in tempo reale potrebbe aiutare i robot futuri a svolgere compiti come spostare inventario, assistere in zone di disastro o riconfigurare pavimenti di fabbrica con meno supervisione umana e maggiore resilienza ai guasti.
Citazione: Muhammed, I., Nada, A.A. & El-Hussieny, H. Real-time decentralized model predictive control for cooperative multi-robot object transport: experimental validation. Sci Rep 16, 9824 (2026). https://doi.org/10.1038/s41598-026-41881-w
Parole chiave: cooperazione multi-robot, trasporto di oggetti, controllo predittivo del modello, controllo decentralizzato, robot mobili