Clear Sky Science · ja
協調型マルチロボット物体輸送のためのリアルタイム分散型モデル予測制御:実験的検証
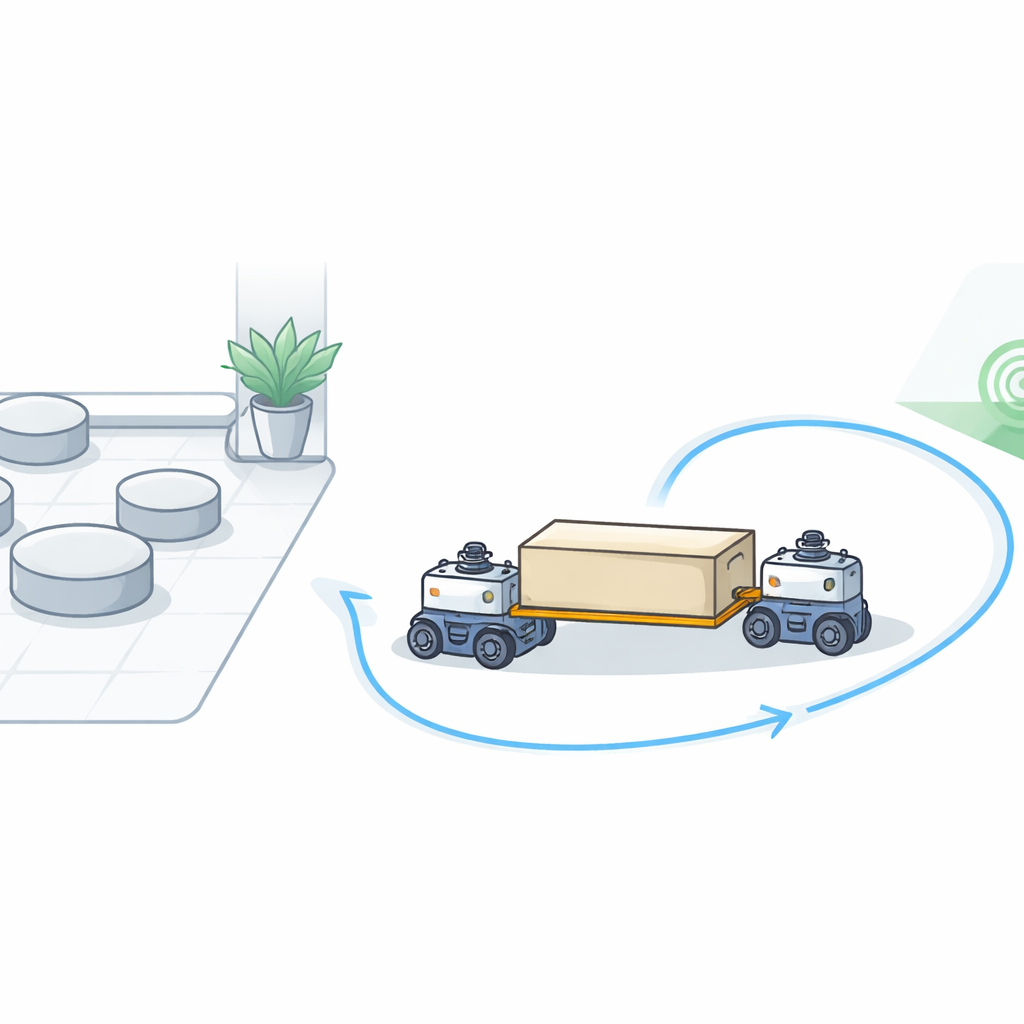
荷物を運ぶために協力するロボットチーム
倉庫で、小さな移動ロボットが人間ではなく箱を協力して狭い角や棚の間を運び、互いに衝突したり周囲の障害物に当たったりしない光景を想像してみてください。本論文は、2台のロボットが重い物体を分担して持ち、センサがノイズを含み視界が不完全な状況でも、リアルタイムにスムーズかつ安全に移動させられる方法を示します。
荷を分担することが難しい理由
複数のロボットに同じ物体を運ばせるのは、単一ロボットに移動を指示するよりもはるかに難しい作業です。複数機は共有荷重の位置で合意し、互いに安全な距離を保ち、壁や障害物にぶつからないようにしつつ、変化に素早く対応しなければなりません。従来の手法はしばしば全てを把握する単一の中央コンピュータに依存し、各ロボットに指示を出しますが、中央の頭脳や通信が故障するとチーム全体が機能しなくなる脆弱性があります。著者らは代わりに、各ロボットが独自に意思決定を行いながらも協調した振る舞いを維持する「分散」アプローチを検討します。
実際のロボットペア
アイデアを検証するために、研究者らは市販の小型ロボットTurtleBot3を2台用いた実物のセットアップを構築しました。各ロボットは駆動輪2つを持ち、軽量のアクリルプラットフォームの一部を担います。2台はピボットや伸縮が可能な専用ジョイントでこの共有プラットフォームに接続されており、チームで運ぶ際に物体がたわんだりずれたりする様子を模擬します。ロボットは居間程度の広さの屋内空間を走行し、上方カメラが位置を把握するための視覚タグが配置されています。
観測と意思決定を移動中に行う
視覚だけでは完全ではありません:上方カメラは一時的にロボットを見失ったり、測定に遅延が生じたりします。共有荷物をリアルタイムで追跡するために、システムはカメラの情報と各ロボットの車輪エンコーダや小型慣性センサの読み取りを融合させます。数学的なフィルタリング手法がこれらの信号を滑らかで信頼できる物体の位置と運動の推定にまとめます。このセンシング層の上で、各ロボットは独自の予測制御器を動かします。制御器は現在の瞬間に反応するだけでなく、短時間先を見越して候補動作を安全制限(速度上限、ロボット間の間隔、障害物への許容接近度など)と照らし合わせて評価します。
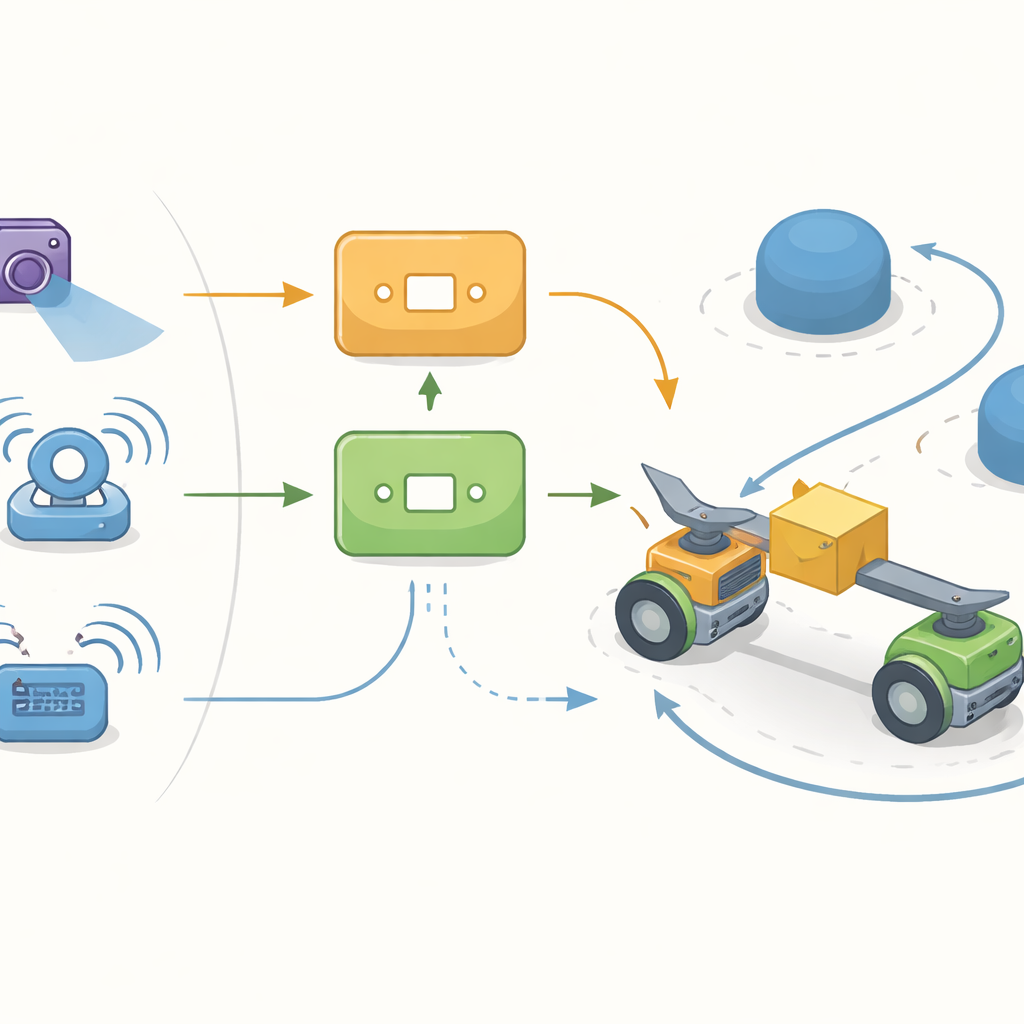
常時通信しない協力
ロボットは協調する必要がありますが、常に会話しているわけではありません。相対的な間隔や向きが期待値から大きく外れたときだけ情報を共有します。これらの通信の合間には、各ロボットが最後に見たパートナーの情報を使い、安全マージンを見込んで衝突を避けます。制御器は優先度も動的に調整します:経路が急に曲がったり障害物が近いときは、予定経路に忠実で編成を維持することに重きを置き、動作のなめらかさへの配慮はやや抑えます。経路が直線になれば優先度を緩め、モータへの負担を減らして動作を滑らかにします。
手法の検証
研究チームはロボットを様々な試験にかけました:ある地点から別の地点への移動、直線や円の追跡、障害物の有無での∞字形経路の走行などです。各ケースで、基本的な制御器と走行中に自己の優先度を再調整できる適応制御器とを比較しました。適応戦略は共有プラットフォームを目標経路にかなり近づけ—精度を概ね1/5から1/3改善し—つつ、間隔、ジョイントの伸び、車輪の回転速度やその変化といった安全制限はすべて満たしました。控えめな計算能力のコンピュータ上でも、各ロボットは十分に高速に計算を終え、毎秒10回の更新で動作決定を行え、リアルタイム運用に余裕があることが示されました。
将来のロボットチームにとっての意義
専門外の読者への結論は、小型で安価なロボットのチームが、単一の中央制御器に依存せずに共有荷重を安全かつ精密に運ぶことが現実的になったという点です。カメラと搭載センサのデータを融合し、各ロボットが自らの動作を予測・最適化しつつ必要なときだけパートナーと情報をやり取りすることで、散乱した環境でも滑らかで正確な輸送が実現されます。この種の分散リアルタイム協働は、今後のロボットが在庫移動、災害支援、工場レイアウトの再構成などを、より少ない人手で高い障害耐性をもって行うのに役立つでしょう。
引用: Muhammed, I., Nada, A.A. & El-Hussieny, H. Real-time decentralized model predictive control for cooperative multi-robot object transport: experimental validation. Sci Rep 16, 9824 (2026). https://doi.org/10.1038/s41598-026-41881-w
キーワード: マルチロボット協調, 物体輸送, モデル予測制御, 分散制御, 移動ロボット