Clear Sky Science · nl
Realtime gedecentraliseerde modelvoorspellende regeling voor coöperatief transport door meerdere robots: experimentele validatie
Robots die samenwerken om de lading te dragen
Stel je een magazijn voor waar kleine mobiele robots, niet mensen, samenwerken om dozen door scherpe bochten en tussen schappen te verplaatsen—zonder tegen elkaar of tegen obstakels te botsen. Dit artikel toont hoe twee zulke robots een zwaar object kunnen delen en het soepel en veilig in realtime kunnen verplaatsen, zelfs wanneer hun sensoren ruis bevatten en hun beeld van de omgeving onvolledig is.
Waarom het delen van de last moeilijk is
Meerdere robots hetzelfde object laten dragen is veel moeilijker dan één robot vertellen waarheen te gaan. De machines moeten het eens worden over de positie van de gedeelde last, een veilige afstand tot elkaar bewaren en botsingen met muren of obstakels vermijden, terwijl ze snel op veranderingen reageren. Traditionele benaderingen vertrouwen vaak op één centrale computer die alles ziet en elke robot vertelt wat te doen. Die opzet kan kwetsbaar zijn: als de centrale ‘hersenen’ of de communicatielink uitvalt, kan het hele team instorten. De auteurs onderzoeken in plaats daarvan een "gedecentraliseerde" aanpak waarbij elke robot zelfstandig beslissingen neemt maar toch als onderdeel van een gecoördineerd team optreedt.
Een paar robots in de echte wereld
Om hun ideeën te testen bouwden de onderzoekers een fysieke opstelling met twee kleine, kant-en-klare robots die bekendstaan als TurtleBot3. Elke robot heeft twee aangedreven wielen en draagt een deel van een lichtgewicht acrylplatform. De twee robots zijn aan dit gedeelde platform verbonden via speciaal ontworpen koppelingen die zowel kunnen draaien als uitrekken, wat nabootst hoe een echt object kan buigen of verschuiven wanneer een team het draagt. De robots bewegen zich in een bescheiden binnenruimte ter grootte van een woonkamer, gemarkeerd met visuele tags die een camera aan het plafond helpen bepalen waar alles zich bevindt.
Zien en beslissen in beweging
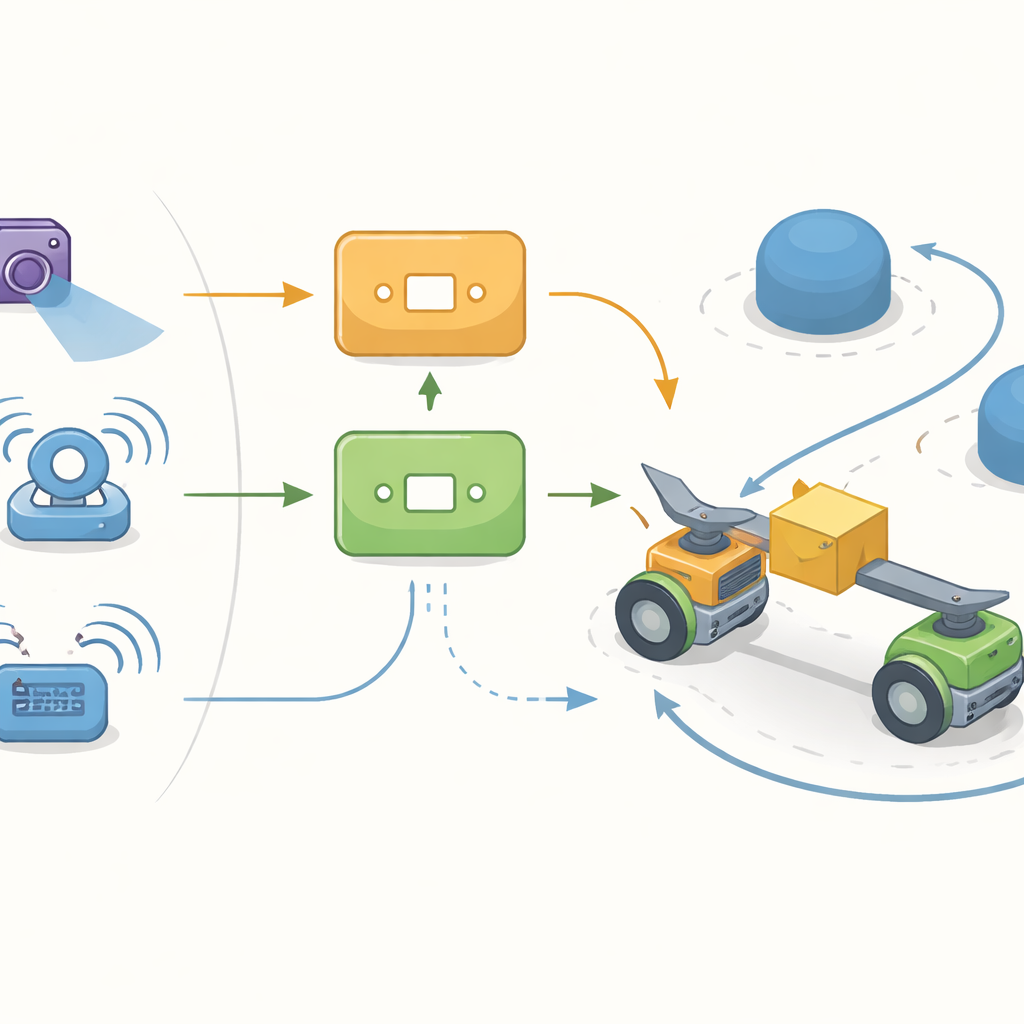
Beeldvorming alleen is niet perfect: de bovenliggende camera kan een robot even uit het zicht verliezen en de metingen zijn vertraagd. Om de gedeelde last in realtime bij te houden, combineert het systeem cameragegevens met uitlezingen van wielencoders en kleine bewegingssensoren op elke robot. Een wiskundige filtermethode maakt van deze signalen één betrouwbare schatting van waar het gedragen object zich bevindt en hoe het beweegt. Bovenop deze sensielaag draait op elke robot een eigen voorspellende controller. In plaats van slechts op het huidige moment te reageren, kijkt de controller een korte tijd vooruit en toetst mogelijke bewegingen aan veiligheidsgrenzen zoals snelheidslimieten, onderlinge afstanden tussen robots en hoe dicht ze bij obstakels mogen komen.
Samenwerken zonder voortdurend te praten
Hoewel de robots moeten samenwerken, voeren ze geen constante communicatie. Ze delen informatie alleen wanneer hun onderlinge afstand of oriëntatie te ver afwijkt van wat verwacht wordt. Tussen deze communicatiemomenten gebruikt elke robot de laatste waarneming van zijn partner en bouwt veiligheidsmarges in om botsingen te vermijden. De controller past ook zijn eigen prioriteiten dynamisch aan: wanneer het gewenste traject scherp bocht, of wanneer obstakels dichtbij zijn, richt hij zich automatisch meer op het blijven volgen van het geplande pad en het behoud van de formatie, en iets minder op het zo soepel mogelijk houden van de beweging. Wanneer het traject weer rechter wordt, versoepelt hij die prioriteiten om de belasting van de motoren te verminderen en de beweging vloeiender te maken.
De methode op de proef gesteld
Het team liet de robots een reeks proeven doorlopen: verplaatsen van punt naar punt, rechte lijnen en cirkels volgen, en een oneindig-teken volgen met en zonder obstakels. In elk geval vergeleken ze een basale versie van de controller met de adaptieve variant die zijn eigen prioriteiten tijdens de uitvoering kan bijstellen. De adaptieve strategie hield het gedragen platform veel dichter bij het bedoelde pad—met een verbetering in nauwkeurigheid van ongeveer een vijfde tot een derde—terwijl nog steeds werd voldaan aan alle veiligheidsgrenzen voor afstand, koppelingsexpansie en hoe snel de wielen kunnen draaien of van snelheid kunnen veranderen. Zelfs op een bescheiden computer kon elke robot zijn berekeningen snel genoeg voltooien om zijn bewegingsbeslissingen tien keer per seconde bij te werken, met genoeg marge voor realtime werking.
Wat dit betekent voor toekomstige robotteams
Voor niet‑specialisten is de kernboodschap dat het nu haalbaar is dat teams van kleine, goedkope robots gedeelde lasten veilig en nauwkeurig dragen zonder afhankelijk te zijn van één centrale controller. Door camera- en sensorgegevens aan boord te combineren en elke robot zijn eigen beweging te laten voorspellen en optimaliseren terwijl ze alleen communiceren wanneer dat nodig is, bereikt het systeem soepel en nauwkeurig transport, zelfs in rommelige ruimtes. Dit soort gedecentraliseerde, realtime samenwerking kan toekomstige robots helpen bij taken zoals het verplaatsen van voorraad, bijstand in rampgebieden of het herinrichten van fabrieksvloeren met minder menselijk toezicht en grotere veerkracht tegen fouten.
Bronvermelding: Muhammed, I., Nada, A.A. & El-Hussieny, H. Real-time decentralized model predictive control for cooperative multi-robot object transport: experimental validation. Sci Rep 16, 9824 (2026). https://doi.org/10.1038/s41598-026-41881-w
Trefwoorden: samenwerking tussen meerdere robots, objecttransport, modelvoorspellende regeling, gedecentraliseerde sturing, mobiele robots