Clear Sky Science · zh
仿生攀爬机器人设计:受壁虎与猫启发、用于粗糙墙面的应用
能爬人不宜涉足之处的机器人
由人类工人对高层建筑、悬崖或工业构筑物进行检测既危险又耗时且代价高昂。本文介绍了一种小型四足机器人,它能像壁虎或猫一样在粗糙墙面上攀爬,采用钩状爪而非吸盘或磁铁。机器人由轻质3D打印部件构成,通过一组简单电机控制,能在类似混凝土的不平整表面上稳固贴附,即便断电也能保持抓持,为进入难以或危险进入的场所提供了更安全的途径。

向壁虎与猫学习
许多攀爬机器人依赖光滑玻璃、强力磁铁或笨重的吸附垫,这限制了它们的作业范围。作者转而观察壁虎和猫的自然攀爬方式。壁虎将身体紧贴墙面,以对角“爬行”方式移动双腿,始终至少保持两只足着地。猫则利用弧形爪钩住树皮或岩石。新型机器人融合了这些理念:其修长低矮的机身与腿部运动模仿壁虎的姿态,而足端排列着一排弧形的七个钢钩,像猫爪在粗糙石面或混凝土上抓钩。此类生物启发使机器人无需泵、风扇或其它复杂的粘附系统即可抓持。
为贴附而造的机身
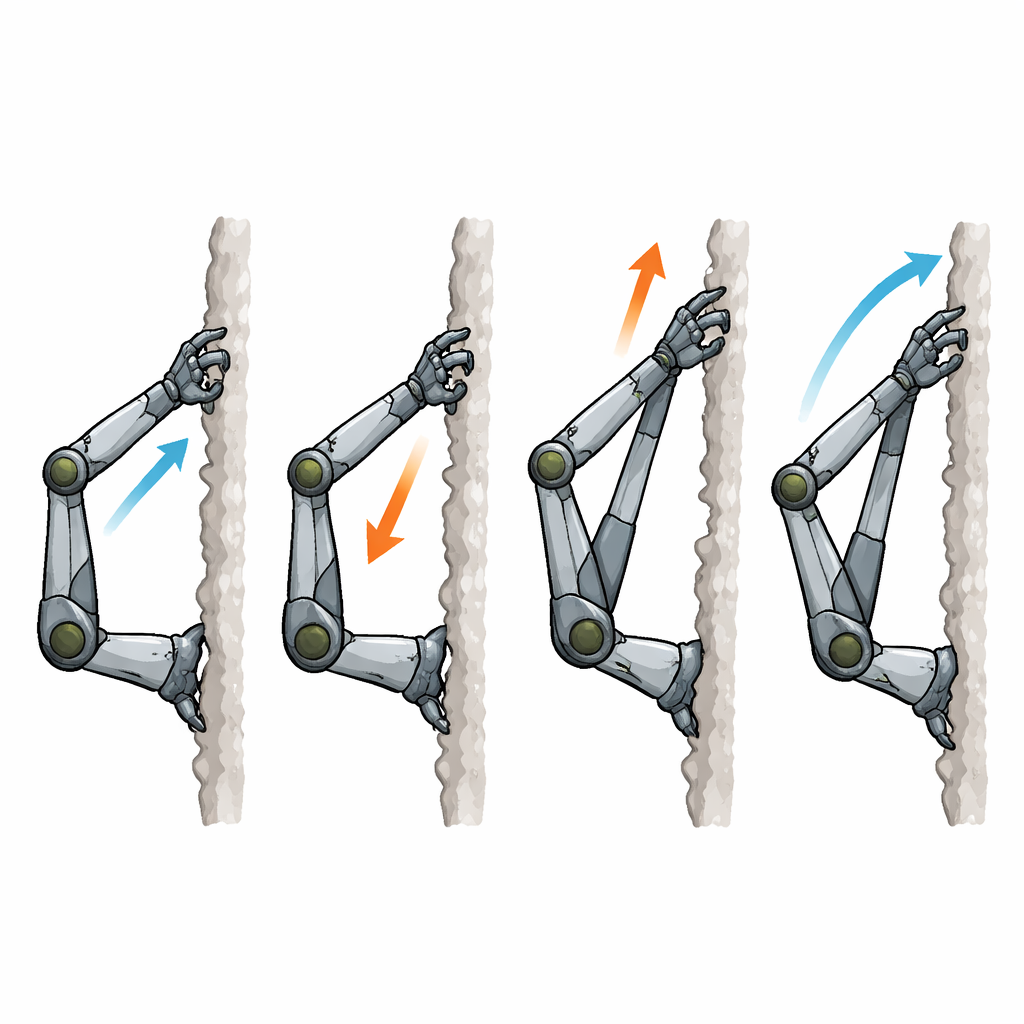
机器人的机架与腿部经过精心设计,以在保持结构简单的同时提升稳定性。每条四肢仅有三个活动关节,按平行四边形布置,使腿摆动时机身仍紧靠墙面。该布局有助于将重心保持靠近表面,降低向后翻落的倾向。机身本体分为前后两半,通过带两侧弹簧的旋转关节连接。受壁虎启发的这一柔性“脊柱”允许机器人在攀爬时略微弯曲,使力更均匀分布到各足上,帮助所有爪子在不平整地形上保持接合。
分担载荷的爪
抓持足是设计的核心。每只足并非平板或仅两爪对抓,而是在弧线上装有七个小型钢制鱼钩。每个钩位于独立沟槽内,后方有弹簧,可实现有限的滑动与旋转而不会相互碰撞。当足部按压在粗糙墙面时,部分钩自然找到凸起或裂缝进行钩挂;有些可能会错过,但这是可接受的。通过将载荷分布在多个钩上,单足可承载约2.5千克,同时容忍放置误差和墙面差异。关键在于,钩与墙面的机械咬合是被动的——一旦啮合,机器人在断电时也能保持附着。
谨慎的攀爬舞步
为将硬件变成平顺运动,团队编程实现了一种模仿壁虎对角步态的腿部运动模式。在任一时刻,两条对角腿支撑机器人,而另外两条抬起、向前摆动并在墙面上稍高处重新接合。每条移动的腿在任一时刻仅有一个关节处于主动状态,这简化了控制并降低了出现不期望侧向位移的可能性。研究者还为每条腿的运动建立了数学描述并用计算机仿真验证,随后将仿真结果与实际测量对比,差异仅有几个百分点,证实了简化模型能捕捉到腿部的真实行为。
将攀爬者置于考验
在计算机辅助软件中设计零件后,团队用轻质塑料3D打印了机身与腿部,并配备了十二个小伺服电机及一块微控制器。成品机器人重约1.8千克,长度约半米。在一面按用途建造、倾斜75度的粗糙墙上测试显示,机器人可反复攀爬两米,高成功率为93%,速度在每分钟20至60厘米之间。即便在更陡的85度表面上,它仍保持较高成功率。由于始终有两条腿钩挂固定,且爪在无吸力或无电力情况下也能锁入墙面,机器人可以长时间安全悬挂,这对检测、监视或搜救任务是一大优势。
为何此项工作重要
该工作并非发明全新的贴附方式,而是聪明地将动物攀爬中的已知思路组合成一台实用机器。壁虎式的身体姿态使机器人紧贴表面并保持稳定,猫式的多爪足在粗糙地形上提供强大且故障安全的抓持。得益于3D打印制造与少量电机,成果比早期许多攀爬机器人更轻、机械更简单且能耗更低,同时仍能搬运有用载荷。对非专业读者而言,关键信息是:通过模仿自然如何分配力与保持平衡,工程师可以构建安静可靠地执行危险垂直作业的机器人,从而让人类免于亲自承担这些风险。
引用: Jodah, M.K., Rashid, M.T., Abdulaali, A.H. et al. Biomimetic climbing robot design inspired by geckos and cats for rough wall applications. Sci Rep 16, 12680 (2026). https://doi.org/10.1038/s41598-026-41880-x
关键词: 攀爬机器人, 仿生设计, 壁虎启发的机器人学, 粗糙表面检测, 多爪抓持