Clear Sky Science · it
Progettazione di un robot biomimetico arrampicatore ispirato a gechi e gatti per applicazioni su pareti ruvide
Robot che si arrampicano dove le persone non dovrebbero
Ispezionare edifici alti, pareti rocciose o strutture industriali è pericoloso, lento e costoso per gli operatori umani. Questo articolo presenta un piccolo robot quadrupede in grado di arrampicarsi su pareti ruvide in modo simile a un geco o a un gatto, usando artigli aduncchi invece di ventose o magneti. Realizzato con parti leggere stampate in 3D e controllato da un semplice insieme di motori, il robot è progettato per aggrapparsi saldamente a superfici irregolari simili al calcestruzzo, anche quando l'alimentazione è interrotta, offrendo un modo più sicuro per raggiungere luoghi difficili o pericolosi per le persone.

Imparare da gechi e gatti
Molti robot arrampicatori si basano su vetro liscio, magneti potenti o ingombranti pad a ventosa, il che limita i luoghi in cui possono operare. Gli autori hanno invece osservato come gechi e gatti si arrampicano in natura. I gechi mantengono il corpo molto vicino alla parete e muovono le zampe con un "crawl" diagonale, mantenendo sempre almeno due zampe attaccate. I gatti usano artigli curvi che si agganciano a corteccia o roccia. Il nuovo robot fonde queste idee: il suo corpo lungo e basso e il movimento delle zampe richiamano la postura del geco, mentre i piedi terminano con una fila arcuata di sette uncini d'acciaio che funzionano come gli artigli di un gatto su pietra o calcestruzzo ruvide. Questa ispirazione biologica permette al robot di afferrare senza pompe, ventole o altri sistemi complessi di adesione.
Un corpo costruito per aggrapparsi
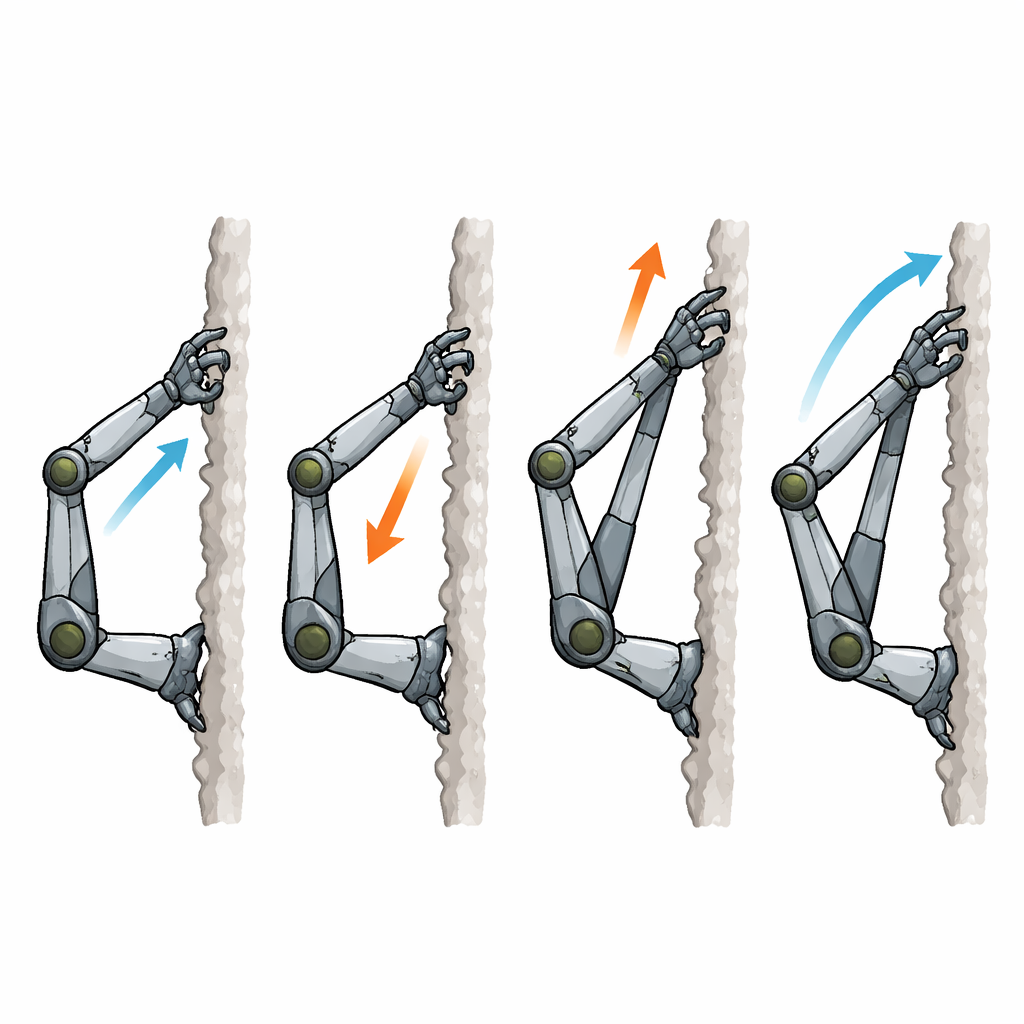
La struttura e le zampe del robot sono state modellate con cura per aumentare la stabilità mantenendo il design semplice. Ciascuna delle quattro zampe ha solo tre giunti mobili, disposti a parallelogramma in modo che il corpo resti molto vicino alla parete mentre la zampa oscilla. Questa configurazione aiuta a tenere il baricentro vicino alla superficie, riducendo la tendenza a ribaltarsi all'indietro. Il corpo stesso è suddiviso in metà anteriore e posteriore collegate da un giunto rotante con molle su entrambi i lati. Questa "colonna" flessibile, ispirata ai gechi, permette al robot di flettersi leggermente durante la scalata, distribuendo le forze in modo più uniforme sui piedi e aiutando tutti gli artigli a rimanere ingaggiati su terreni irregolari.
Artigli che condividono il carico
Il piede afferrare è il cuore del progetto. Invece di un pad piatto o di soli due artigli contrapposti, ciascun piede monta sette piccoli uncini da pesca in acciaio disposti lungo un arco. Ogni uncino è inserito nella propria scanalatura con una molla dietro, così può scorrere e ruotare leggermente senza urtare i vicini. Quando il piede preme contro una parete ruvida, alcuni uncini trovano naturalmente sporgenze o crepe a cui agganciarsi; altri possono mancare il punto d'appoggio, ma questo è accettabile. Distribuendo il carico su molti uncini, il piede può reggere fino a circa 2,5 chilogrammi tollerando piccoli errori di posizionamento e variazioni nella superficie della parete. Fondamentalmente, l'incastro meccanico tra uncini e parete è passivo: una volta ingaggiato, il robot può rimanere attaccato anche se i motori perdono alimentazione.
Una danza d'arrampicata accurata
Per trasformare questo hardware in un movimento fluido, il team ha programmato un pattern di movimento delle zampe modellato sul passo diagonale del geco. In ogni istante, due zampe opposte sostengono il robot mentre le altre due si sollevano, oscillano in avanti e si riagganciano leggermente più in alto sulla parete. Solo un giunto in ciascuna zampa in movimento è attivo alla volta, il che semplifica il controllo e riduce la probabilità di spostamenti laterali indesiderati. I ricercatori hanno inoltre sviluppato una descrizione matematica del moto di ciascuna zampa e l'hanno verificata con simulazioni al computer, quindi hanno confrontato quelle previsioni con misure nel mondo reale. Le differenze sono state solo di qualche percento, confermando che il modello semplificato cattura il comportamento reale del braccio.
Mettere il climber alla prova
Dopo aver progettato le parti con software CAD, il team ha stampato in 3D corpo e zampe usando plastiche leggere e ha aggiunto dodici piccoli servomotori più un microcontrollore. Il robot finito pesa circa 1,8 chilogrammi ed è lungo all'incirca mezzo metro. I test su una parete ruvida costruita ad hoc inclinata di 75 gradi hanno mostrato che il robot poteva salire ripetutamente per due metri con un tasso di successo del 93 percento, muovendosi a 20-60 centimetri al minuto. Anche su una superficie più ripida (85 gradi) ha mantenuto un elevato tasso di successo. Poiché due zampe sono sempre agganciate e gli artigli si bloccano nella parete senza richiedere ventose o alimentazione, il robot può rimanere sospeso in sicurezza per lunghi periodi, un vantaggio per attività di ispezione, monitoraggio o ricerca e soccorso.
Perché è importante
Piuttosto che inventare un modo completamente nuovo di aderire alle pareti, questo lavoro combina con intelligenza idee note dall'arrampicata animale in una macchina pratica. Una postura simile a quella del geco mantiene il robot vicino alla superficie e stabile, mentre un piede multi-artiglio alla maniera del gatto fornisce una presa forte e a prova di guasto su terreni ruvide. Grazie alla costruzione stampata in 3D e a un numero contenuto di motori, il risultato è più leggero, meccanicamente più semplice e più efficiente dal punto di vista energetico rispetto a molti robot arrampicatori precedenti, pur essendo in grado di trasportare carichi utili. Per i non esperti, il messaggio chiave è che copiando il modo in cui la natura distribuisce le forze e mantiene l'equilibrio, gli ingegneri possono costruire robot che svolgono silenziosamente e in modo affidabile lavori verticali pericolosi così che le persone non debbano farlo.
Citazione: Jodah, M.K., Rashid, M.T., Abdulaali, A.H. et al. Biomimetic climbing robot design inspired by geckos and cats for rough wall applications. Sci Rep 16, 12680 (2026). https://doi.org/10.1038/s41598-026-41880-x
Parole chiave: robot arrampicatori, design biomimetico, robotica ispirata ai gechi, ispezione di superfici ruvide, presa multi-artiglio