Clear Sky Science · ru
Биомиметический проект лазающего робота, вдохновлённый гекконами и кошками, для работ на грубых стенах
Роботы, которые поднимаются туда, куда людям не стоит
Осмотр высоких зданий, скал или промышленных сооружений опасен, медленен и дорог для людей. В этой статье представлен небольшой четырёхногий робот, который может лазить по грубым стенам подобно геккону или кошке, используя зацепляющиеся когти вместо присосок или магнитов. Собранный из лёгких 3D‑печатных деталей и управляемый простым набором моторов, робот рассчитан на надёжное сцепление с неровными бетоноподобными поверхностями, даже при отключении питания, предлагая более безопасный способ добраться до труднодоступных или опасных мест.

Учимся у гекконов и кошек
Многие лазящие роботы зависят от гладкого стекла, сильных магнитов или громоздких присосок, что ограничивает их применение. Авторы вместо этого наблюдали, как гекконы и кошки лазают в природе. Гекконы держат тело очень близко к стене и двигают ногами по диагональной «ползущей» схеме, всегда сохраняют контакт как минимум двух лап. Кошки используют изогнутые когти, которые зацепляются за кору или камень. Новый робот сочетает эти идеи: его длинное низкое тело и движение ног напоминают позу геккона, а стопы заканчиваются дугой из семи стальных крючков, которые действуют как кошачьи когти на грубом камне или бетоне. Эта биологическая подсказка позволяет роботу захватывать поверхность без насосов, вентиляторов или других сложных адгезионных систем.
Корпус, созданный для цепкости
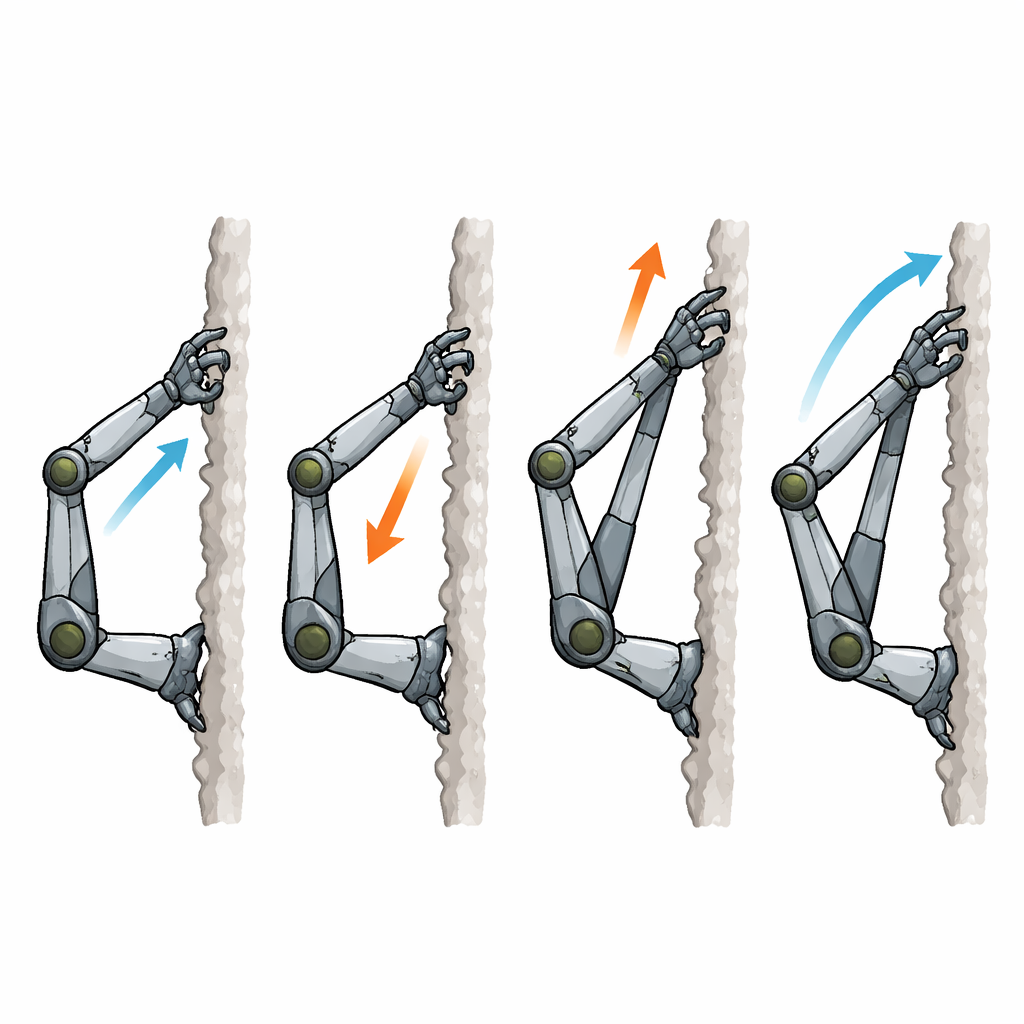
Рама и ноги робота были тщательно сформированы для повышения устойчивости при сохранении простоты конструкции. Каждая из четырёх ног имеет всего три подвижных сустава, расположенные в параллелограмме так, чтобы тело оставалось очень близко к стене при качании ноги. Такая компоновка помогает держать центр тяжести робота у поверхности, что снижает склонность к опрокидыванию назад и падению. Сам корпус разделён на переднюю и заднюю половины, соединённые вращающимся шарниром со сторонами на пружинах. Этот гибкий «позвоночник», вдохновлённый гекконами, позволяет роботу слегка изгибаться при подъёме, распределяя силы более равномерно по ступням и помогая всем когтям оставаться зацеплёнными на неровной местности.
Когти, которые распределяют нагрузку
Захватывающая стопа — сердце конструкции. Вместо плоской подушки или лишь двух противоположных когтей каждая ступня несёт семь небольших стальных рыболовных крючков, расположенных по дуге. Каждый крючок сидит в собственной канавке со встроенной пружиной, поэтому он может немного скользить и поворачиваться, не сталкиваясь с соседями. Когда ступня прижимается к грубой стене, некоторые крючки естественно находят выступы или трещины для зацепления; другие могут промахнуться, и это допустимо. Распределяя нагрузку по множеству крючков, стопа может удерживать до примерно 2,5 килограмма, при этом терпя небольшие ошибки в размещении и вариации поверхности стены. Важно, что механическое сцепление крючков со стеной пассивное — как только они зацепились, робот может оставаться прикреплённым даже при отключении моторов.
Тщательный танец лазания
Чтобы превратить это оборудование в плавное движение, команда запрограммировала схему движения ног, смоделированную по диагональной походке геккона. В любой момент две противоположные ноги поддерживают робота, пока другие две поднимаются, машут вперёд и вновь присоединяются чуть выше по стене. В каждой движущейся ноге одновременно активен лишь один сустав, что упрощает управление и снижает вероятность нежелательных боковых сдвигов. Исследователи также разработали математическое описание движения каждой ноги и проверили его с помощью компьютерного моделирования, а затем сопоставили эти предсказания с экспериментальными измерениями. Различия составили всего несколько процентов, подтверждая, что упрощённая модель адекватно отражает поведение механизма.
Проверка лазальщика в деле
После проектирования деталей в CAD‑программе команда напечатала корпус и ноги на 3D‑принтере из лёгких пластиков и добавила двенадцать небольших сервоприводов и микроконтроллер. Готовый робот весит около 1,8 килограмма и имеет длину примерно полметра. Испытания на специально подготовленной грубой стене, наклонённой под 75 градусов, показали, что робот может многократно подниматься на два метра с успешностью 93 процента, двигаясь со скоростью 20–60 сантиметров в минуту. Даже на более крутом 85‑градусном склоне он сохранял высокий процент успеха. Поскольку всегда как минимум две ноги зацеплены и когти фиксируются в стене без использования присосок или энергии, робот может безопасно висеть на месте длительное время — преимущество для инспекции, мониторинга или поисково‑спасательных операций.
Почему это важно
Вместо того чтобы изобретать принципиально новый способ прикрепления к стенам, эта работа разумно сочетает известные приёмы животных‑лазунов в практичной машине. Поза, похожая на геккона, держит робота близко к поверхности и делает его устойчивым, тогда как многокогтевая стопа в кошачьем стиле обеспечивает прочный, отказоустойчивый захват на грубом рельефе. Благодаря 3D‑печатной конструкции и умеренному числу моторов результат получился легче, механически проще и экономичнее по энергии, чем многие предыдущие лазящие роботы, при этом он остаётся способным нести полезные нагрузки. Для неспециалистов ключевая мысль в том, что, копируя способы, которыми природа распределяет силы и поддерживает равновесие, инженеры могут создавать роботов, которые тихо и надёжно выполняют опасную вертикальную работу, чтобы люди этого не делали.
Цитирование: Jodah, M.K., Rashid, M.T., Abdulaali, A.H. et al. Biomimetic climbing robot design inspired by geckos and cats for rough wall applications. Sci Rep 16, 12680 (2026). https://doi.org/10.1038/s41598-026-41880-x
Ключевые слова: лазящие роботы, биомиметический дизайн, робототехника, вдохновлённая гекконами, инспекция грубых поверхностей, многокогтевое захватывание