Clear Sky Science · sv
Biomimetisk klätterrobot designad efter geckos och katter för tillämpningar på grova väggar
Robotar som klättrar där människor inte bör
Att inspektera höga byggnader, klippor eller industriella konstruktioner är farligt, långsamt och kostsamt för mänskliga arbetare. Denna artikel presenterar en liten fyrbent robot som kan klättra på grova väggar ungefär som en gecko eller en katt, genom att använda kroklika klor istället för sugkoppar eller magneter. Byggd av lätta 3D‑utskrivna delar och styrd av ett enkelt motorsystem är roboten utformad för att fästa säkert på ojämna betong‑liknande ytor, även när strömmen bryts, vilket ger ett säkrare sätt att nå platser som är svåra eller farliga för människor.

Lärdomar från geckos och katter
Många klätterrobotar förlitar sig på slätt glas, starka magneter eller klumpiga sugkuddar, vilket begränsar var de kan ta sig. Författarna studerade istället hur geckos och katter naturligt klättrar. Geckos håller kroppen mycket nära väggen och rör sina ben i en diagonal “krup” och har alltid minst två fötter i kontakt. Katter använder böjda klor som hakar i bark eller sten. Den nya roboten blandar dessa idéer: dess långa, låga kropp och benrörelser efterliknar geckons hållning, medan fötterna avslutas i en bågformad rad om sju stålkrokar som fungerar som en katts klor på grov sten eller betong. Denna biologiska inspiration låter roboten greppa utan pumpar, fläktar eller andra komplexa adhesionssystem.
En kropp byggd för att hålla fast
Robotens ram och ben formades noggrant för att öka stabiliteten samtidigt som designen hålls enkel. Varje av de fyra benen har endast tre rörliga leder, ordnade i ett parallellogram så att kroppen håller sig mycket nära väggen när benet sveper. Denna utformning hjälper till att hålla robotens tyngdpunkt nära ytan, vilket minskar benägenheten att tippa bakåt och falla. Kroppen är delad i en fram‑ och bakhalva kopplade med en roterande led med fjädrar på båda sidor. Denna flexibla “rygg” inspirerad av geckos låter roboten böja sig något när den klättrar och sprida krafterna jämnare över fötterna, vilket hjälper alla klor att förbli engagerade på ojämn terräng.
Klor som delar lasten
Greppfoten är kärnan i konstruktionen. Istället för en platt dyna eller bara två motstående klor bär varje fot sju små stålkrokar ordnade längs en båge. Varje krok sitter i sin egen skåra med en fjäder bakom, så att den kan glida och rotera lite utan att stöta i grannarna. När foten pressas mot en grov vägg hittar vissa krokar naturligt upphöjningar eller sprickor att haka fast i; andra kan missa, men det är acceptabelt. Genom att fördela lasten över många krokar kan foten hålla upp till cirka 2,5 kilogram samtidigt som små fel i placering och variationer i väggytan tolereras. Avgörande är att den mekaniska inlåsningsmekanismen mellan krokar och vägg är passiv — när krokarna väl har greppat kan roboten förbli fäst även om motorerna tappar ström.
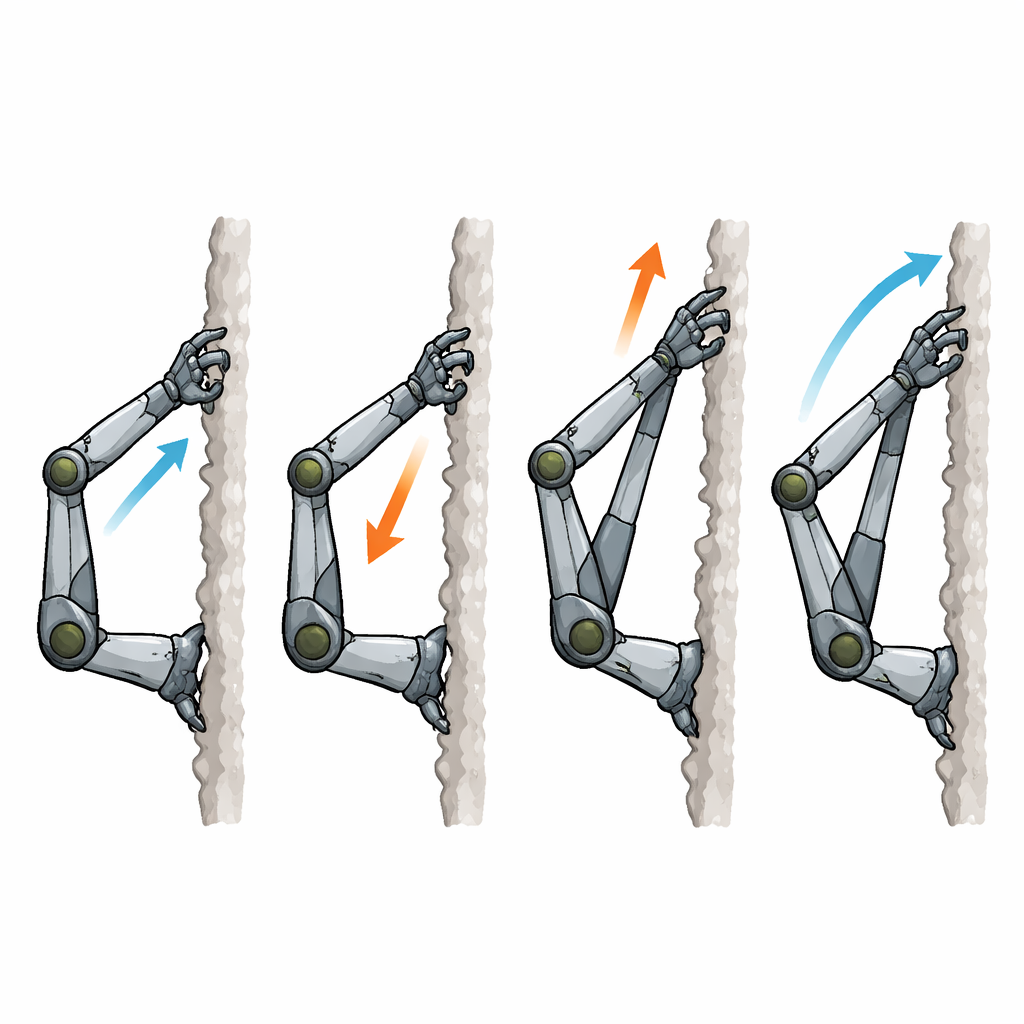
En försiktig klätterdans
För att omvandla hårdvaran till mjuk rörelse programmerade teamet ett benrörelsemönster modellerat på geckons diagonala gångart. Vid varje ögonblick stödjer två motsatta ben roboten medan de andra två lyfts, sveper framåt och sätter sig något högre upp på väggen. Endast en led i varje rörligt ben är aktiv åt gången, vilket förenklar styrningen och minskar risken för oönskade sidoförskjutningar. Forskarna utvecklade också en matematisk beskrivning av varje bens rörelse och kontrollerade den med datorsimuleringar, för att sedan jämföra dessa förutsägelser med verkliga mätningar. Avvikelserna var endast några få procent, vilket bekräftade att den förenklade modellen fångar hur armen faktiskt beter sig.
Sätta klättraren på prov
Efter att ha designat delarna i datorstödd mjukvara 3D‑printade teamet kroppen och benen i lätta plaster och lade till tolv små servomotorer samt en mikrokontroller. Den färdiga roboten väger cirka 1,8 kilogram och är ungefär en halv meter lång. Tester på en specialbyggd grov vägg lutad 75 grader visade att roboten upprepade gånger kunde klättra två meter med en framgångsfrekvens på 93 procent, i en hastighet av 20 till 60 centimeter per minut. Även på en brantare 85‑graders yta bibehöll den hög framgångsfrekvens. Eftersom två ben alltid är kroklagda och klorna låser mot väggen utan behov av sug eller ström kan roboten tryggt hänga kvar länge — en fördel för inspektion, övervakning eller sök‑och‑räddningsuppgifter.
Varför detta är viktigt
I stället för att uppfinna ett helt nytt sätt att fästa vid väggar kombinerar detta arbete på ett smart sätt kända idéer från djurs klättring till en praktisk maskin. En gecko‑liknande kroppshållning håller roboten nära ytan och stabil, medan en katt‑liknande fler‑klospfot ger starkt, felsäkert grepp på grov terräng. Tack vare 3D‑printad konstruktion och ett måttligt antal motorer är resultatet lättare, mekaniskt enklare och mer energieffektivt än många tidigare väggklättrande robotar, men fortfarande kapabel att bära nyttolaster. För icke‑experter är huvudbudskapet att genom att efterlikna hur naturen fördelar krafter och bibehåller balans kan ingenjörer bygga robotar som tyst och tillförlitligt utför farligt vertikalt arbete så att människor slipper göra det.
Citering: Jodah, M.K., Rashid, M.T., Abdulaali, A.H. et al. Biomimetic climbing robot design inspired by geckos and cats for rough wall applications. Sci Rep 16, 12680 (2026). https://doi.org/10.1038/s41598-026-41880-x
Nyckelord: klätterrobotar, biomimetisk design, gecko‑inspirerad robotik, inspektion av grova ytor, fler‑klor grepp