Clear Sky Science · ja
ヤモリとネコに着想を得た粗面壁向け生体模倣型の登攀ロボット設計
人が行くべきでない場所を登るロボット
高層建築物や崖、産業構造物の点検は、人間にとって危険で時間がかかり費用も高い。本論文は、ヤモリやネコのように粗い壁を登れる小型四脚ロボットを紹介する。吸盤や磁石の代わりにフック状の爪を用い、軽量の3Dプリント部品と単純なモーター群で駆動する設計だ。本機はコンクリートに似た不均一な表面にも確実に喰いつき、電源が切れても保持できるため、人が立ち入るのが困難・危険な場所へ到達するより安全な手段を提供する。

ヤモリとネコから学ぶ
多くの登攀ロボットは滑らかなガラス面や強力な磁石、かさばる吸着パッドに頼っており、行動範囲が限られる。著者らは代わりにヤモリやネコが自然に登る様子を観察した。ヤモリは体を壁に非常に近づけ、斜めの「クロール」歩様で脚を動かし、常に少なくとも二本を接地させる。ネコは樹皮や岩に爪を引っ掛ける湾曲した爪を使う。新しいロボットはこれらを融合しており、長く低い胴体と脚の動きはヤモリの姿勢を模し、足先は七つの鋼製フックが弧状に並ぶアーチになっていて、粗い石やコンクリートに対してネコの爪のように働く。この生物学的着想により、ポンプやファンなどの複雑な接着システムなしで把持できる。
張りつくための身体設計
機体フレームと脚は安定性を高めつつ設計を簡素に保つよう慎重に形作られている。四本の脚はそれぞれ可動関節が三つだけで、平行四辺形状に配置されており、脚が振れる間も胴体が壁に非常に近い位置を保つ。この配置は重心を表面近くに保ち、後方にひっくり返って落下する傾向を減らす。胴体は前後に分かれ、両側にバネのついた回転ジョイントでつながれている。この柔軟な“背骨”はヤモリに触発されたもので、登攀中に機体がわずかに曲がることを可能にし、力を足全体に均等に分散させて不均一な地形でも全爪の係合を助ける。
荷重を分散する爪
把持足は設計の核心である。平らなパッドや二つの対向爪の代わりに、各足は弧に沿って配列された七つの小さな鋼製釣り針を備えている。各フックは独立した溝に収まり、後ろにバネがあるため、隣り合うフックと干渉せずに少し滑動・回転できる。足が粗い壁に押し当てられると、一部のフックは自然に凹凸や亀裂に食い込み、他のフックは掛からないこともあるが、それで問題ない。荷重を多数のフックに分散することで、足は約2.5キログラムまで保持でき、設置誤差や壁面のばらつきに耐える。重要なのは、フックと壁の機械的かみ合わせが受動的であり、一度掛かればモーターの電源が切れてもロボットは付着したままでいられる点である。
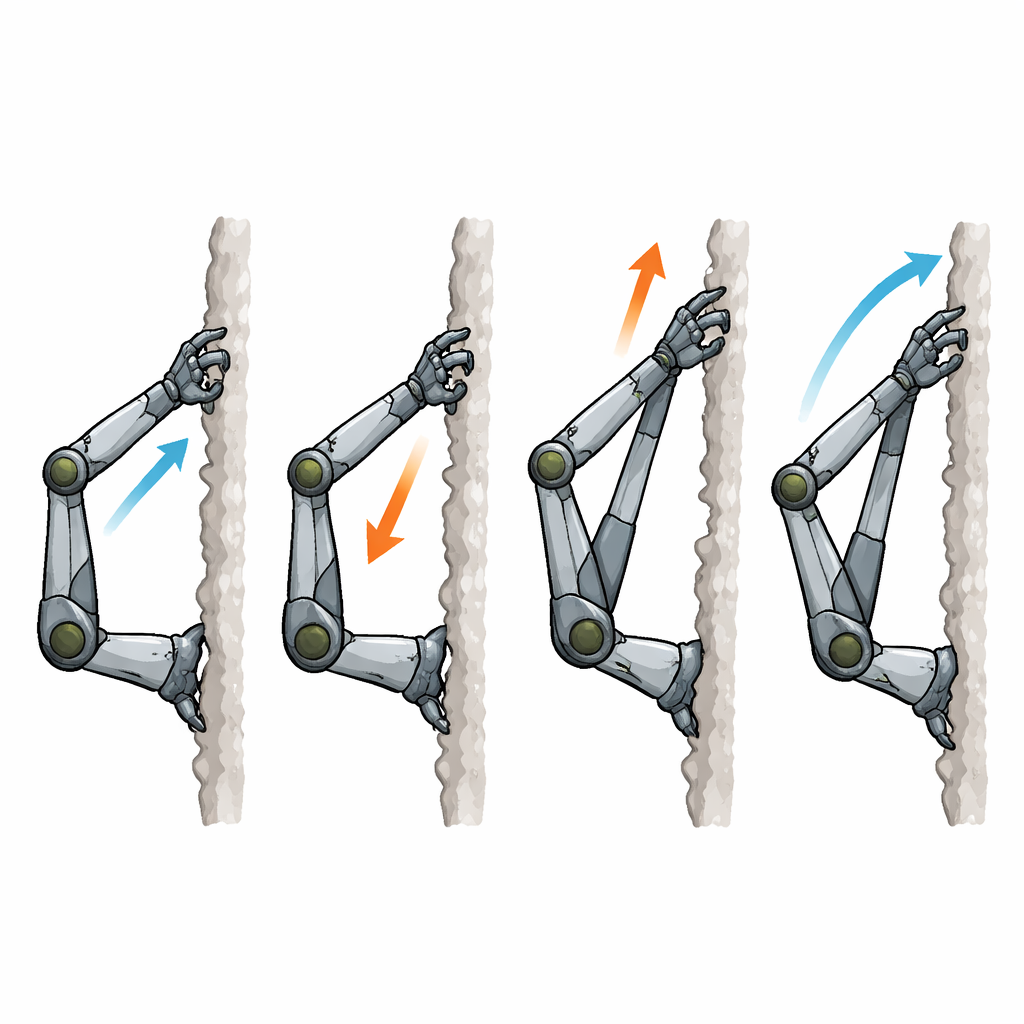
緻密な登攀のダンス
このハードウェアを滑らかな動作に変えるため、チームはヤモリの斜め歩様を模した脚の動作パターンをプログラムした。常に向かい合う二本の脚がロボットを支え、残る二本が持ち上がって前方に振られ、壁上でやや高い位置に再着する。一度に動く脚の関節は各脚で一つだけ能動化され、これにより制御が簡素化され、望ましくない横方向のずれの可能性が低くなる。研究者らはまた各脚の運動を数学的に記述し、コンピュータシミュレーションで検証して実機測定と比較した。差は数パーセント程度にとどまり、簡略化モデルが実際の挙動をとらえていることを確認した。
登攀機の試験
部品をCADで設計した後、チームは胴体と脚を軽量プラスチックで3Dプリントし、12個の小型サーボモータとマイコンを組み込んだ。完成機の重量は約1.8キログラムで、長さはおよそ0.5メートル。75度に傾けた専用の粗面壁でのテストでは、ロボットは繰り返し2メートルを93パーセントの成功率で登り、速度は毎分20〜60センチメートルだった。より急な85度の面でも高い成功率を維持した。常に二本の脚がフックで固定され、爪が吸着や電力を必要とせずに壁にロックするため、ロボットは長時間安全にぶら下がることができ、点検、監視、捜索救助などの用途に利点がある。
なぜ重要か
全く新しい接着方法を発明するのではなく、本研究は動物の登攀で知られた考え方を賢く組み合わせて実用的な機械に落とし込んでいる点が重要だ。ヤモリのような体勢はロボットを表面に近づけて安定させ、ネコのような多爪の足は粗い地形で強力かつフェイルセーフな把持を提供する。3Dプリントによる製作と限られた数のモータにより、結果として従来の多くの壁登攀ロボットより軽量で機械的に単純、エネルギー効率も高く、それでいて実用的な荷重を運べる。専門外の読者への要点は、自然が力を分配し平衡を保つ方法を模すことで、技術者が人が行うには危険な垂直作業を静かに確実にこなすロボットを作れるということである。
引用: Jodah, M.K., Rashid, M.T., Abdulaali, A.H. et al. Biomimetic climbing robot design inspired by geckos and cats for rough wall applications. Sci Rep 16, 12680 (2026). https://doi.org/10.1038/s41598-026-41880-x
キーワード: 登攀ロボット, 生体模倣設計, ヤモリ由来ロボティクス, 粗面点検, 多爪グリッピング