Clear Sky Science · en
Biomimetic climbing robot design inspired by geckos and cats for rough wall applications
Robots That Climb Where People Shouldn’t
Inspecting tall buildings, cliffs, or industrial structures is dangerous, slow, and expensive for human workers. This paper introduces a small four‑legged robot that can climb rough walls much like a gecko or a cat, using hooked claws instead of suction cups or magnets. Built from lightweight 3D‑printed parts and controlled by a simple set of motors, the robot is designed to cling securely to uneven concrete‑like surfaces, even when the power is cut, offering a safer way to reach places that are hard or hazardous for people.

Learning from Geckos and Cats
Many climbing robots rely on smooth glass, strong magnets, or bulky suction pads, which limits where they can go. The authors instead watched how geckos and cats naturally climb. Geckos keep their bodies very close to the wall and move their legs in a diagonal “crawl,” always keeping at least two feet attached. Cats use curved claws that hook into bark or rock. The new robot blends these ideas: its long, low body and leg motion echo a gecko’s posture, while its feet end in an arched row of seven steel hooks that work like a cat’s claws on rough stone or concrete. This biological inspiration lets the robot grip without pumps, fans, or other complex adhesion systems.
A Body Built for Clinging
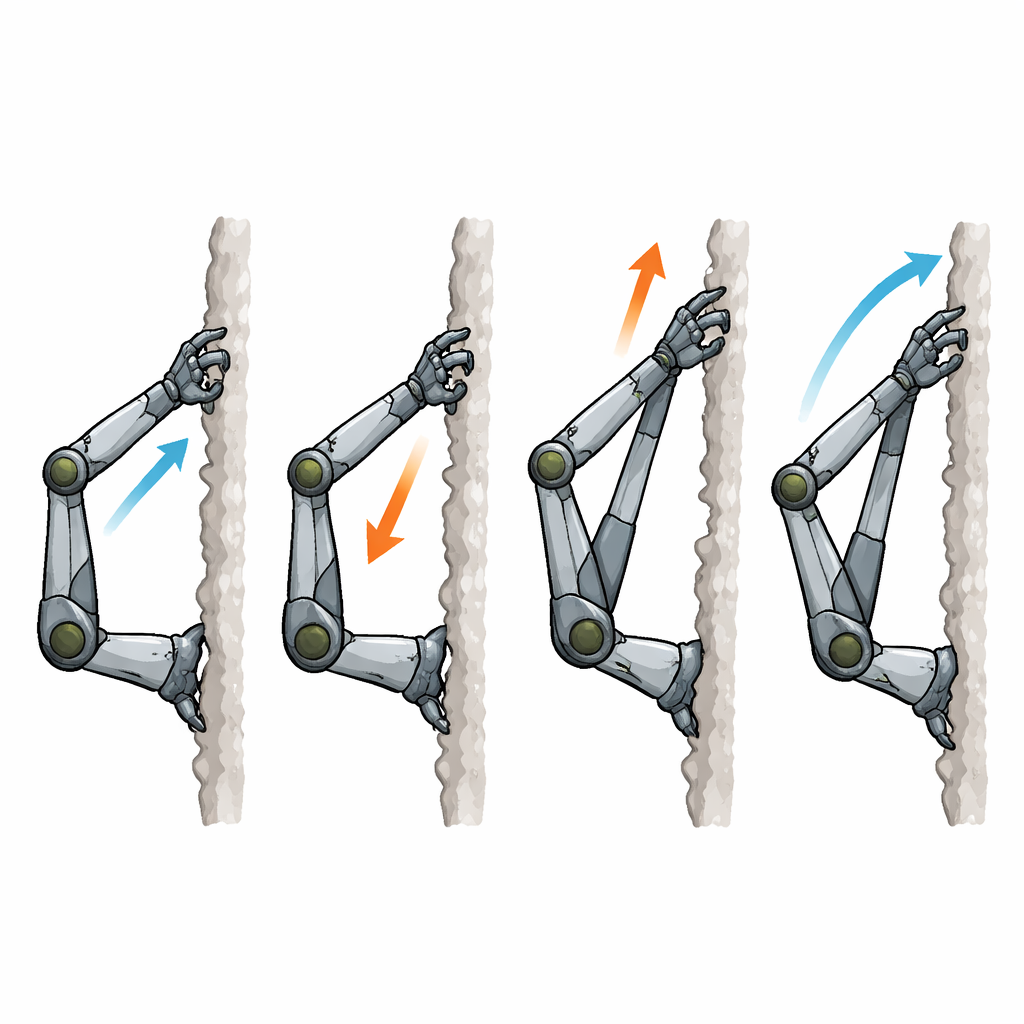
The robot’s frame and legs were carefully shaped to increase stability while keeping the design simple. Each of the four legs has only three moving joints, arranged in a parallelogram so that the body stays very close to the wall as the leg swings. This layout helps keep the robot’s center of gravity near the surface, which reduces the tendency to tip backward and fall. The body itself is split into front and rear halves linked by a rotating joint with springs on both sides. This flexible “spine,” inspired by geckos, lets the robot bend slightly as it climbs, spreading forces more evenly across its feet and helping all claws stay engaged on uneven terrain.
Claws That Share the Load
The gripping foot is the heart of the design. Instead of a flat pad or just two opposing claws, each foot carries seven small steel fishing hooks arranged along an arc. Every hook sits in its own groove with a spring behind it, so it can slide and rotate a little without bumping into its neighbors. When the foot presses against a rough wall, some hooks naturally find bumps or cracks to latch onto; others may miss, but that is acceptable. By spreading the load across many hooks, the foot can hold up to about 2.5 kilograms while tolerating small errors in placement and variations in the wall surface. Crucially, the mechanical interlocking of hooks and wall is passive—once engaged, the robot can remain attached even if the motors lose power.
A Careful Climbing Dance
To turn this hardware into smooth motion, the team programmed a leg‑movement pattern modeled on a gecko’s diagonal gait. At any moment, two opposite legs support the robot while the other two lift, swing forward, and reattach slightly higher on the wall. Only one joint in each moving leg is active at a time, which simplifies control and reduces the chance of unwanted sideways shifts. The researchers also developed a mathematical description of each leg’s motion and checked it with computer simulations, then compared those predictions with real‑world measurements. The differences were only a few percent, confirming that the simplified model captures how the arm truly behaves.
Putting the Climber to the Test
After designing the parts in computer‑aided software, the team 3D‑printed the body and legs using lightweight plastics and added twelve small servo motors plus a microcontroller. The finished robot weighs about 1.8 kilograms and is roughly half a meter long. Tests on a purpose‑built rough wall tilted at 75 degrees showed that the robot could repeatedly climb two meters with a success rate of 93 percent, moving at 20 to 60 centimeters per minute. Even on a steeper 85‑degree surface, it maintained a high success rate. Because two legs are always hooked in place and the claws lock into the wall without needing suction or power, the robot can safely hang in place for long periods, an advantage for inspection, monitoring, or search‑and‑rescue tasks.
Why This Matters
Rather than inventing a brand‑new way to stick to walls, this work smartly combines known ideas from animal climbing into a practical machine. A gecko‑like body posture keeps the robot close to the surface and stable, while a cat‑like multi‑claw foot provides strong, fail‑safe gripping on rough terrain. Thanks to 3D‑printed construction and a modest number of motors, the result is lighter, mechanically simpler, and more energy‑efficient than many earlier wall‑climbing robots, yet still capable of carrying useful loads. For non‑experts, the key message is that by copying how nature distributes forces and maintains balance, engineers can build robots that quietly and reliably do dangerous vertical work so people don’t have to.
Citation: Jodah, M.K., Rashid, M.T., Abdulaali, A.H. et al. Biomimetic climbing robot design inspired by geckos and cats for rough wall applications. Sci Rep 16, 12680 (2026). https://doi.org/10.1038/s41598-026-41880-x
Keywords: climbing robots, biomimetic design, gecko-inspired robotics, rough surface inspection, multi-claw gripping