Clear Sky Science · he
עיצוב רובוט מטפס ביו‑מימטי בהשראת גקוים וחתולים ליישומים על קירות מחוספסים
רובוטים שמטפסים там שאנשים לא אמורים
בדיקה של בניינים גבוהים, מצוקים או מבנים תעשייתיים מסוכנת, איטית ויקרה עבור עובדים אנושיים. מאמר זה מציג רובוט קטן בעל ארבע רגליים היכול לטפס על קירות מחוספסים בדומה לגקו או לְחתול, באמצעות טפרים מעוקלים במקום פומפות או מגנטים. בנוי מחלקים קלי‑משקל המודפסים בתלת‑ממד ונשלט על‑ידי סט פשוט של מנועים, הרובוט תוכנן להיצמד בביטחה למשטחי בטון‑דומים לא אחידים, גם כאשר החשמל נותק, ומציע דרך בטוחה יותר להגיע למקומות שקשים או מסוכנים לאנשים.

לומדים מגקוים וחתולים
רוב רובוטי הטיפוס מסתמכים על זכוכית חלקה, מגנטים חזקים או פדיות יניקה גדולות, מה שמגביל את התחום בו הם יכולים לפעול. המחברים במקום זאת התבוננו איך גקוים וחתולים מטפסים באופן טבעי. גקוים שומרים על גופם קרוב מאוד לקיר ומניעים את רגליהם בתנועת “זחילה” אלכסונית, כשבועה תמיד מחוברת לפחות שתי רגליים. חתולים משתמשים בטפרים מעוקלים שנעשים קרסים בקליפה או בסלע. הרובוט החדש משלב רעיונות אלה: גופו הארוך והנמוך ותנועת הרגליים מזכירים את תנוחת הגקו, בעוד כפותיו מסתיימות בשורת שבעה קרסי פלדה מקושתתים העובדים כמו טפרי חתול על אבן או בטון מחוספס. ההשראה הביולוגית הזו מאפשרת לרובוט להיצמד ללא משאבות, מאווררים או מערכות הדבקה מורכבות אחרות.
גוף שנבנה להיצמדות
השלד והרגליים של הרובוט עוצבו בקפידה כדי להגדיל יציבות תוך שמירה על פשטות העיצוב. לכל אחת מארבע הרגליים יש רק שלושה מפרקים נעים, מסודרים במקבילית כך שהגוף נשאר קרוב מאוד לקיר כאשר הרגל מתנודדת. סידור זה מסייע לשמור על מרכז הכובד של הרובוט קרוב לפני השטח, מה שמפחית את הנטייה להתקפל לאחור וליפול. הגוף עצמו מחולק לחציו קדמי ואחורי שמחוברים במפרק מסתובב עם קפיצים משני הצדדים. "עמוד שדרה" גמיש זה, בהשראת הגקו, מאפשר לרובוט להתכופף מעט בזמן הטיפוס, מפזר כוחות באופן שווה יותר על כפות הרגליים ועוזר לכל הטפרים להישאר מעוגנים על שטח לא אחיד.
טפרים שמחלקים את העומס
כף האחיזה היא הלב של העיצוב. במקום פד שטוח או רק שני טפרים מנוגדים, כל כף מכילה שבעה ווים קטנים מפלדת דייגים המסודרים על קשת. כל וו יושב בתעלה משלו עם קפיץ מאחוריו, כך שהוא יכול להחליק ולהסתובב קצת מבלי להיתקל בשכניו. כאשר הכף לוחצת נגד קיר מחוספס, חלק מהווים מוצאים באופן טבעי בליטות או סדקים לתפוס; אחרים עלולים לפספס, אך זה מקובל. על ידי פיזור העומס על פני ווים רבים, הכף יכולה להחזיק עד כ‑2.5 קילוגרם תוך סבילות לשגיאות שינחתו ושינויים במשטח הקיר. ובחשיבות עליונה, ההחלקה המכנית בין הווים והקיר היא פסיבית — ברגע שהם מעוגנים, הרובוט יכול להישאר מחובר גם אם המנועים מאבדים כוח.
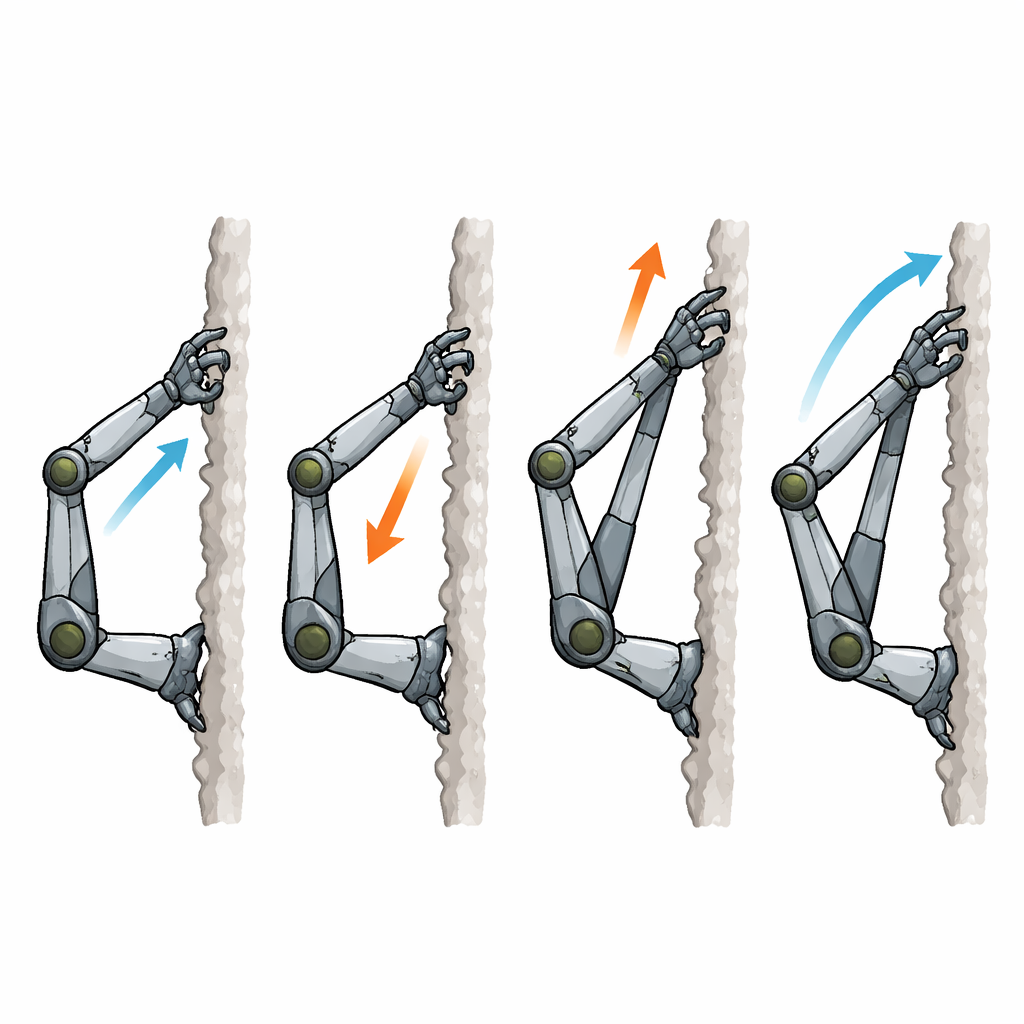
ריקוד טיפוס מדוד
כדי להפוך את החומרה לתנועה חלקה, הקבוצה תכנתה תבנית תנועת רגליים המודלת על גחון אלכסוני של גקו. בכל רגע נתון, שתי רגליים נגדיות תומכות ברובוט בעוד השתיים האחרות עולות, מתנודדות קדימה ומתחברות שוב מעט גבוה יותר על הקיר. רק מפרק אחד בכל רגל נעה פעילה בכל פעם, מה שמפשט את הבקרה ומפחית את הסיכוי להזזות רוחביות בלתי רצויות. החוקרים גם פיתחו תיאור מתמטי של תנועת כל רגל ובדקו אותו בסימולציות ממוחשבות, ואז השוו את התחזיות האלה עם מדידות בעולם האמיתי. ההבדלים היו רק כמה אחוזים, ואישרו שהמודל המפושט לוכד את אופן התנהגות הזרוע בפועל.
השמת המעלה למבחן
לאחר תכנון החלקים בתוכנת סיוע ממוחשב, הקבוצה הדפיסה בתלת‑ממד את הגוף והרגליים מפלסטיק קל והוסיפה תריסר מיקרו‑מנועי סרבו בנוסף למיקרו‑בקר. הרובוט המוגמר שוקל כ‑1.8 קילוגרם ואורכו כ‑חצי מטר. ניסויים על קיר מחוספס מיוחד המוטה ב‑75 מעלות הראו שהרובוט יכול לטפס שוב ושוב שני מטרים עם שיעור הצלחה של 93 אחוז, במהירות של 20 עד 60 סנטימטרים לדקה. אפילו על משטח תלול יותר של 85 מעלות הוא שמר על שיעור הצלחה גבוה. מכיוון ששתי רגליים תמיד מעוגנות והטפרים ננעלים בקיר בלי צורך ביניקה או כוח, הרובוט יכול לתלוש במקום בבטחה לפרקי זמן ארוכים — יתרון לבדיקות, ניטור או משימות חילוץ וחיפוש.
מדוע זה חשוב
במקום להמציא דרך חדשה לחלוטין להיצמד לקירות, עבודה זו משלבת בחוכמה רעיונות ידועים מטיפוס בעלי‑חיים למכונה מעשית. תנוחת גוף בדומה לגקו שומרת את הרובוט קרוב לפני השטח ויציב, בעוד כף רב־טפרית בסגנון חתול מספקת אחיזה חזקה ובטיחותית על משטחים מחוספסים. הודות לבנייה בהדפסה תלת‑ממדית ומספר צנוע של מנועים, התוצאה קלה יותר, פשוטה יותר מבחינה מכנית ויעילה אנרגטית יותר מרוב רובוטי הטיפוס הקודמים, ועדיין מסוגלת לשאת משא מועיל. עבור קהל שאינו מומחה, המסר המרכזי הוא שבחיקוי האופן שבו הטבע מפזר כוחות ומתחזק איזון, מהנדסים יכולים לבנות רובוטים שמבצעים בעדינות ובאמינות עבודה אנכית מסוכנת כדי שאנשים לא יצטרכו לעשות זאת.
ציטוט: Jodah, M.K., Rashid, M.T., Abdulaali, A.H. et al. Biomimetic climbing robot design inspired by geckos and cats for rough wall applications. Sci Rep 16, 12680 (2026). https://doi.org/10.1038/s41598-026-41880-x
מילות מפתח: רובוטים מטפסים, עיצוב ביו‑מימטי, רובוטיקה בהשראת גקו, בדיקת משטחים מחוספסים, אחיזת רב‑טפרים