Clear Sky Science · es
Diseño de robot trepador biomimético inspirado en geckos y gatos para aplicaciones en paredes rugosas
Robots que trepan donde las personas no deberían
Inspeccionar edificios altos, acantilados o estructuras industriales es peligroso, lento y costoso para los trabajadores humanos. Este artículo presenta un pequeño robot de cuatro patas que puede trepar paredes rugosas de manera similar a un gecko o un gato, usando garras en forma de anzuelo en lugar de ventosas o imanes. Construido con piezas ligeras impresas en 3D y controlado por un conjunto simple de motores, el robot está diseñado para adherirse con seguridad a superficies irregulares tipo hormigón, incluso cuando se corta la energía, ofreciendo una forma más segura de alcanzar lugares difíciles o peligrosos para las personas.

Aprendiendo de geckos y gatos
Muchos robots trepadores dependen de vidrio liso, imanes potentes o almohadillas de succión voluminosas, lo que limita dónde pueden ir. Los autores, en cambio, observaron cómo trepan naturalmente los geckos y los gatos. Los geckos mantienen el cuerpo muy cerca de la pared y mueven las patas en una “caminata” diagonal, manteniendo siempre al menos dos patas en contacto. Los gatos usan garras curvadas que se enganchan en la corteza o la roca. El nuevo robot combina estas ideas: su cuerpo largo y bajo y el movimiento de las patas recuerdan la postura de un gecko, mientras que sus pies terminan en una hilera arqueada de siete ganchos de acero que funcionan como las garras de un gato sobre piedra o hormigón rugoso. Esta inspiración biológica permite que el robot se agarre sin bombas, ventiladores u otros sistemas de adhesión complejos.
Un cuerpo diseñado para adherirse
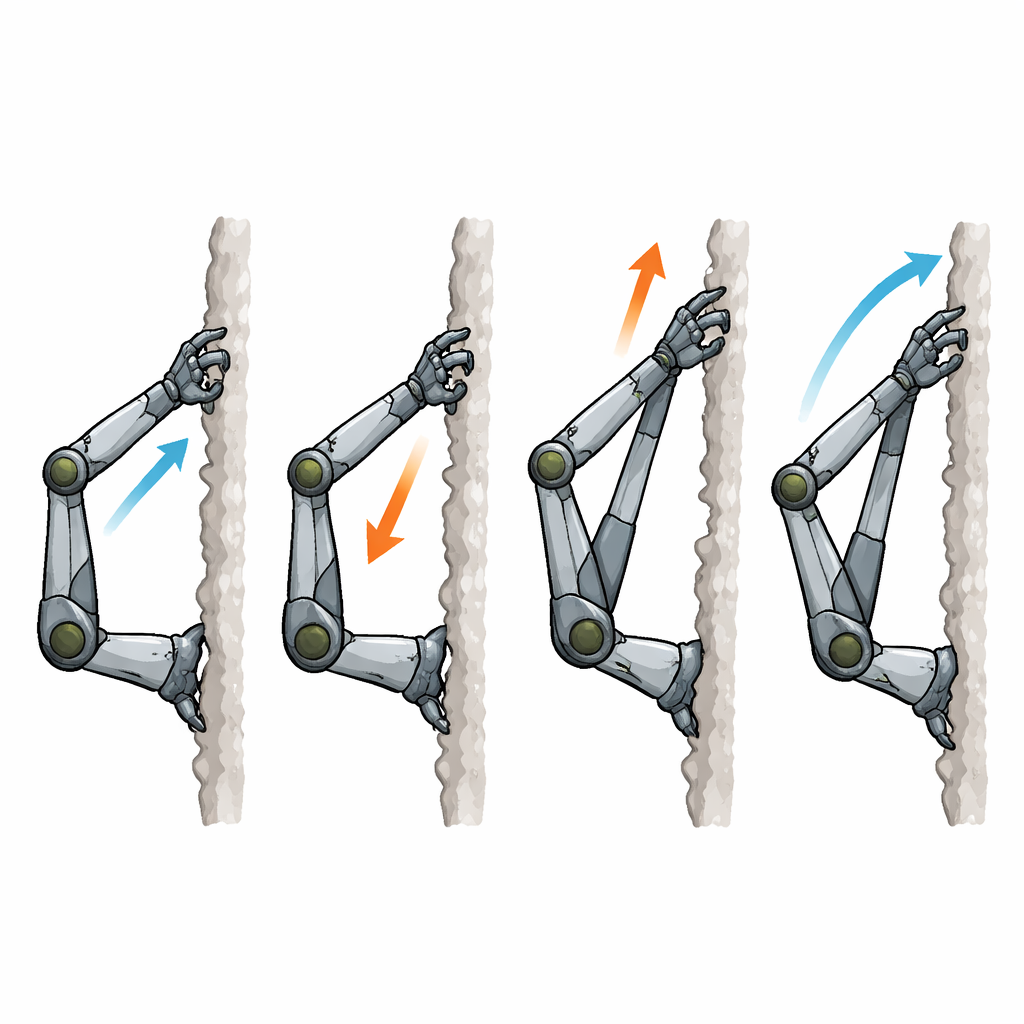
El chasis y las patas del robot fueron modelados con cuidado para aumentar la estabilidad manteniendo el diseño simple. Cada una de las cuatro patas tiene solo tres articulaciones móviles, dispuestas en un paralelogramo para que el cuerpo permanezca muy cerca de la pared mientras la pata oscila. Esta configuración ayuda a mantener el centro de gravedad del robot cerca de la superficie, lo que reduce la tendencia a inclinarse hacia atrás y caer. El cuerpo en sí está dividido en mitades delanteras y traseras unidas por una articulación giratoria con muelles a ambos lados. Esta “columna” flexible, inspirada en los geckos, permite que el robot se doble ligeramente mientras trepa, distribuyendo las fuerzas de manera más uniforme sobre sus pies y ayudando a que todas las garras se mantengan enganchadas en terreno irregular.
Garras que comparten la carga
El pie de agarre es el núcleo del diseño. En lugar de una almohadilla plana o solo dos garras opuestas, cada pie lleva siete pequeños anzuelos de pesca de acero dispuestos a lo largo de un arco. Cada anzuelo se asienta en su propia ranura con un muelle detrás, de modo que puede deslizarse y rotar un poco sin chocar con sus vecinos. Cuando el pie presiona contra una pared rugosa, algunos ganchos encuentran naturalmente salientes o grietas donde engancharse; otros pueden fallar, y eso es aceptable. Al repartir la carga entre muchos ganchos, el pie puede sostener hasta unos 2,5 kilogramos mientras tolera pequeños errores de colocación y variaciones en la superficie de la pared. De forma crucial, el entrelazado mecánico de ganchos y pared es pasivo: una vez enganchado, el robot puede permanecer adherido incluso si los motores pierden potencia.
Un cuidadoso baile de escalada
Para convertir este hardware en un movimiento fluido, el equipo programó un patrón de movimiento de las patas modelado en la marcha diagonal de un gecko. En cualquier momento, dos patas opuestas soportan el robot mientras las otras dos se levantan, avanzan y se reenganchan ligeramente más alto en la pared. Solo una articulación en cada pata en movimiento está activa a la vez, lo que simplifica el control y reduce la probabilidad de desplazamientos laterales no deseados. Los investigadores también desarrollaron una descripción matemática del movimiento de cada pata y la verificaron con simulaciones por ordenador, para luego comparar esas predicciones con mediciones en el mundo real. Las diferencias fueron de solo unos pocos porcentajes, confirmando que el modelo simplificado captura cómo se comporta realmente el sistema.
Poniendo al trepador a prueba
Tras diseñar las piezas en un software de asistencia por ordenador, el equipo imprimió en 3D el cuerpo y las patas con plásticos ligeros y añadió doce pequeños servomotores además de un microcontrolador. El robot terminado pesa alrededor de 1,8 kilogramos y mide aproximadamente medio metro de longitud. Las pruebas en una pared rugosa construida a propósito e inclinada a 75 grados mostraron que el robot podía trepar repetidamente dos metros con una tasa de éxito del 93 por ciento, moviéndose a 20–60 centímetros por minuto. Incluso en una superficie más empinada de 85 grados, mantuvo una alta tasa de éxito. Dado que dos patas están siempre enganchadas y las garras se bloquean en la pared sin necesitar succión o alimentación, el robot puede colgarse de forma segura durante largos periodos, una ventaja para tareas de inspección, monitorización o búsqueda y rescate.
Por qué esto importa
En lugar de inventar una forma completamente nueva de adherirse a las paredes, este trabajo combina de manera inteligente ideas conocidas del escalado animal en una máquina práctica. Una postura del cuerpo similar a la del gecko mantiene el robot cerca de la superficie y estable, mientras que un pie multi‑garra al estilo gato proporciona un agarre fuerte y a prueba de fallos en terreno rugoso. Gracias a la construcción impresa en 3D y a un número modesto de motores, el resultado es más ligero, mecánicamente más simple y más eficiente energéticamente que muchos robots trepadores anteriores, y aun así capaz de transportar cargas útiles. Para los no expertos, el mensaje clave es que al copiar cómo la naturaleza distribuye fuerzas y mantiene el equilibrio, los ingenieros pueden construir robots que realicen en silencio y con fiabilidad trabajos verticales peligrosos para que las personas no tengan que hacerlo.
Cita: Jodah, M.K., Rashid, M.T., Abdulaali, A.H. et al. Biomimetic climbing robot design inspired by geckos and cats for rough wall applications. Sci Rep 16, 12680 (2026). https://doi.org/10.1038/s41598-026-41880-x
Palabras clave: robots trepadores, diseño biomimético, robótica inspirada en geckos, inspección de superficies rugosas, agarre multi‑garra