Clear Sky Science · de
Biomimetisches Kletterrobot-Design inspiriert von Geckos und Katzen für raue Wandanwendungen
Roboter, die dort klettern, wo Menschen es nicht sollten
Die Inspektion hoher Gebäude, Klippen oder Industrieanlagen ist für Menschen gefährlich, langsam und teuer. Dieser Beitrag stellt einen kleinen vierbeinigen Roboter vor, der raue Wände ähnlich wie ein Gecko oder eine Katze erklimmen kann und statt Saugnäpfen oder Magneten gehakte Krallen verwendet. Aus leichten, 3D-gedruckten Bauteilen gebaut und von einer einfachen Anordnung von Motoren gesteuert, ist der Roboter so ausgelegt, dass er sich sicher an unebenen, betonähnlichen Oberflächen festhält — selbst bei Stromausfall — und so einen sichereren Zugang zu schwer erreichbaren oder gefährlichen Stellen ermöglicht.

Lernen von Geckos und Katzen
Viele Kletterroboter sind auf glattes Glas, starke Magneten oder sperrige Saugteller angewiesen, was ihren Einsatzbereich einschränkt. Die Autoren beobachteten stattdessen, wie Geckos und Katzen natürlich klettern. Geckos halten ihren Körper sehr nah an der Wand und bewegen ihre Beine in einem diagonalen „Kriechen“, wobei stets mindestens zwei Füße Kontakt behalten. Katzen nutzen gebogene Krallen, die sich in Rinde oder Fels verhaken. Der neue Roboter verbindet diese Ideen: Sein langer, flacher Körper und die Beinbewegung erinnern an die Haltung eines Geckos, während die Füße in einer gebogenen Reihe aus sieben Stahlhaken enden, die auf rauem Stein oder Beton wie Katzenkrallen wirken. Diese biologische Inspiration ermöglicht dem Roboter Halt ohne Pumpen, Ventilatoren oder andere komplexe Haftsysteme.
Ein Körper gebaut zum Festhalten
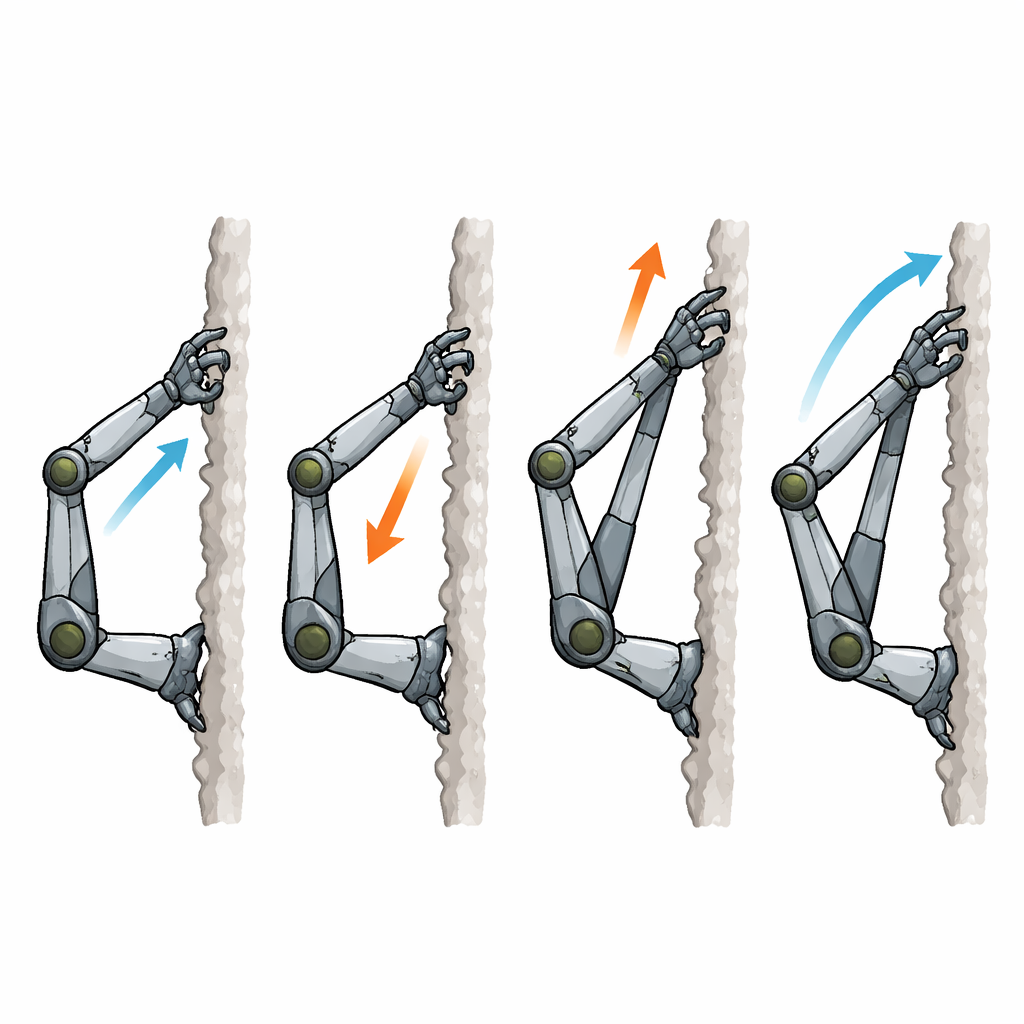
Rahmen und Beine des Roboters wurden so geformt, dass die Stabilität erhöht wird, ohne das Design zu verkomplizieren. Jedes der vier Beine hat nur drei bewegliche Gelenke, die in einem Parallelogramm angeordnet sind, sodass der Körper beim Schwingen des Beins sehr nahe an der Wand bleibt. Diese Anordnung hilft, den Schwerpunkt des Roboters in der Nähe der Oberfläche zu halten, wodurch die Neigung zum Umkippen nach hinten reduziert wird. Der Körper selbst ist in vordere und hintere Hälften geteilt, die über ein drehbares Gelenk mit Federn auf beiden Seiten verbunden sind. Diese flexible „Wirbelsäule“, inspiriert von Geckos, erlaubt dem Roboter, beim Klettern leicht zu biegen, Kräfte gleichmäßiger auf die Füße zu verteilen und allen Krallen zu helfen, auf unebenem Terrain in Eingriff zu bleiben.
Krallen, die die Last teilen
Der greifende Fuß ist das Herzstück des Designs. Statt einer flachen Platte oder nur zweier gegenüberliegender Krallen trägt jeder Fuß sieben kleine Stahlangelhaken, die entlang eines Bogens angeordnet sind. Jeder Haken sitzt in einer eigenen Rille mit einer dahinterliegenden Feder, sodass er sich etwas verschieben und drehen kann, ohne die Nachbarn zu blockieren. Wenn der Fuß gegen eine raue Wand gedrückt wird, finden einige Haken natürlicherweise Vorsprünge oder Risse zum Einhaken; andere können danebenliegen, was aber akzeptabel ist. Durch die Verteilung der Last auf viele Haken kann der Fuß etwa 2,5 Kilogramm halten und toleriert dabei kleine Platzierungsfehler und Variationen in der Wandoberfläche. Entscheidend ist, dass die mechanische Verzahnung von Haken und Wand passiv ist — einmal eingerastet, kann der Roboter befestigt bleiben, selbst wenn die Motoren ausfallen.
Ein sorgfältiger Klettertanz
Um aus der Hardware eine geschmeidige Bewegung zu machen, programmierten die Forscher ein Beinbewegungsmuster, das auf dem diagonalen Gang eines Geckos basiert. Zu jedem Zeitpunkt stützen zwei gegenüberliegende Beine den Roboter, während die anderen beiden anheben, nach vorne schwingen und etwas höher an der Wand wieder ansetzen. In jedem bewegten Bein ist jeweils nur ein Gelenk aktiv, was die Steuerung vereinfacht und die Wahrscheinlichkeit unerwünschter seitlicher Verschiebungen verringert. Die Forscher entwickelten außerdem eine mathematische Beschreibung der Bewegung jedes Beins und überprüften sie mit Computersimulationen, bevor sie diese Vorhersagen mit Messungen aus der Praxis verglichen. Die Abweichungen lagen nur bei wenigen Prozent und bestätigten, dass das vereinfachte Modell das tatsächliche Verhalten des Arms erfasst.
Den Kletterer auf die Probe stellen
Nach der Konstruktion der Teile in CAD-Software druckte das Team den Körper und die Beine in 3D aus leichten Kunststoffen und ergänzte zwölf kleine Servomotoren sowie einen Mikrocontroller. Der fertige Roboter wiegt etwa 1,8 Kilogramm und ist ungefähr einen halben Meter lang. Tests an einer speziell gebauten rauen Wand, die um 75 Grad geneigt war, zeigten, dass der Roboter wiederholt zwei Meter hoch klettern konnte mit einer Erfolgsrate von 93 Prozent und einer Geschwindigkeit von 20 bis 60 Zentimetern pro Minute. Selbst auf einer steileren 85-Grad-Fläche hielt er eine hohe Erfolgsrate. Da stets zwei Beine eingerastet sind und die Krallen ohne Saugen oder Energie in der Wand greifen, kann der Roboter über längere Zeit sicher hängen — ein Vorteil für Inspektion, Überwachung oder Such- und Rettungseinsätze.
Warum das wichtig ist
Statt eine völlig neue Art des Anhaftens an Wänden zu erfinden, kombiniert diese Arbeit klug bewährte Ideen aus dem Kletterverhalten von Tieren zu einer praktischen Maschine. Eine geckoähnliche Körperhaltung hält den Roboter nah an der Oberfläche und stabil, während ein katzenähnlicher Mehrkrallen-Fuß starken, ausfallsicheren Halt auf rauem Terrain bietet. Dank 3D-gedruckter Konstruktion und einer moderaten Anzahl von Motoren ist das Ergebnis leichter, mechanisch einfacher und energieeffizienter als viele frühere Kletterroboter, bleibt dabei aber in der Lage, nützliche Lasten zu tragen. Für Laien lautet die Kernbotschaft: Indem Ingenieure kopieren, wie die Natur Kräfte verteilt und Balance erhält, lassen sich Roboter bauen, die still und zuverlässig gefährliche vertikale Arbeiten übernehmen, damit Menschen es nicht tun müssen.
Zitation: Jodah, M.K., Rashid, M.T., Abdulaali, A.H. et al. Biomimetic climbing robot design inspired by geckos and cats for rough wall applications. Sci Rep 16, 12680 (2026). https://doi.org/10.1038/s41598-026-41880-x
Schlüsselwörter: Kletterroboter, biomimetisches Design, gecko-inspirierte Robotik, Inspektion rauer Oberflächen, mehrfach-Krallen-Griff