Clear Sky Science · tr
Gecko ve kedilerden esinlenen biomimetik tırmanma robotu tasarımı: pürüzlü duvar uygulamaları için
İnsanların Gitmemesi Gereken Yerlere Tırmanan Robotlar
Yüksek binaları, kayalıkları veya endüstriyel yapıları denetlemek insan işçiler için tehlikeli, yavaş ve pahalıdır. Bu makale, vantuz veya mıknatıs yerine kancalı pençeler kullanan, tıpkı bir gecko ya da kedi gibi pürüzlü duvarlara tırmanabilen küçük dört ayaklı bir robotu tanıtıyor. Hafif 3D yazdırılmış parçalardan üretilen ve basit bir motor setiyle kontrol edilen robot, beton benzeri düzensiz yüzeylere bile güç kesildiğinde bile sağlam şekilde tutunacak biçimde tasarlanmış; böylece insanların gitmesinin zor veya tehlikeli olduğu yerlere daha güvenli bir erişim sunuyor.

Geckolardan ve Kedilerden Öğrenmek
Birçok tırmanma robotu düz cama, güçlü mıknatıslara veya hantal vantuzlara dayandığı için hareket alanları sınırlı kalıyor. Yazarlar bunun yerine geckoların ve kedilerin nasıl doğal olarak tırmandığını gözlemlemişler. Geckolar vücutlarını duvara çok yakın tutar ve bacaklarını diyagonal bir “sürünme” hareketiyle hareket ettirir, her zaman en az iki ayağı bağlı tutarlar. Kediler ise kabuk veya kayaya kanca atan kıvrık pençeler kullanır. Yeni robot bu fikirleri harmanlıyor: uzun, alçak gövdesi ve bacak hareketleri bir geckonun duruşunu andırırken, ayakları yedi çelik kancadan oluşan kavisli bir sıra ile sonlanıyor; bunlar pürüzlü taş veya betonda bir kedinin pençesi gibi işliyor. Bu biyolojik ilham, robotun pompa, fan veya diğer karmaşık yapışma sistemlerine ihtiyaç duymadan kavrama sağlamasına olanak veriyor.
Tutanağa Uygun Bir Gövde
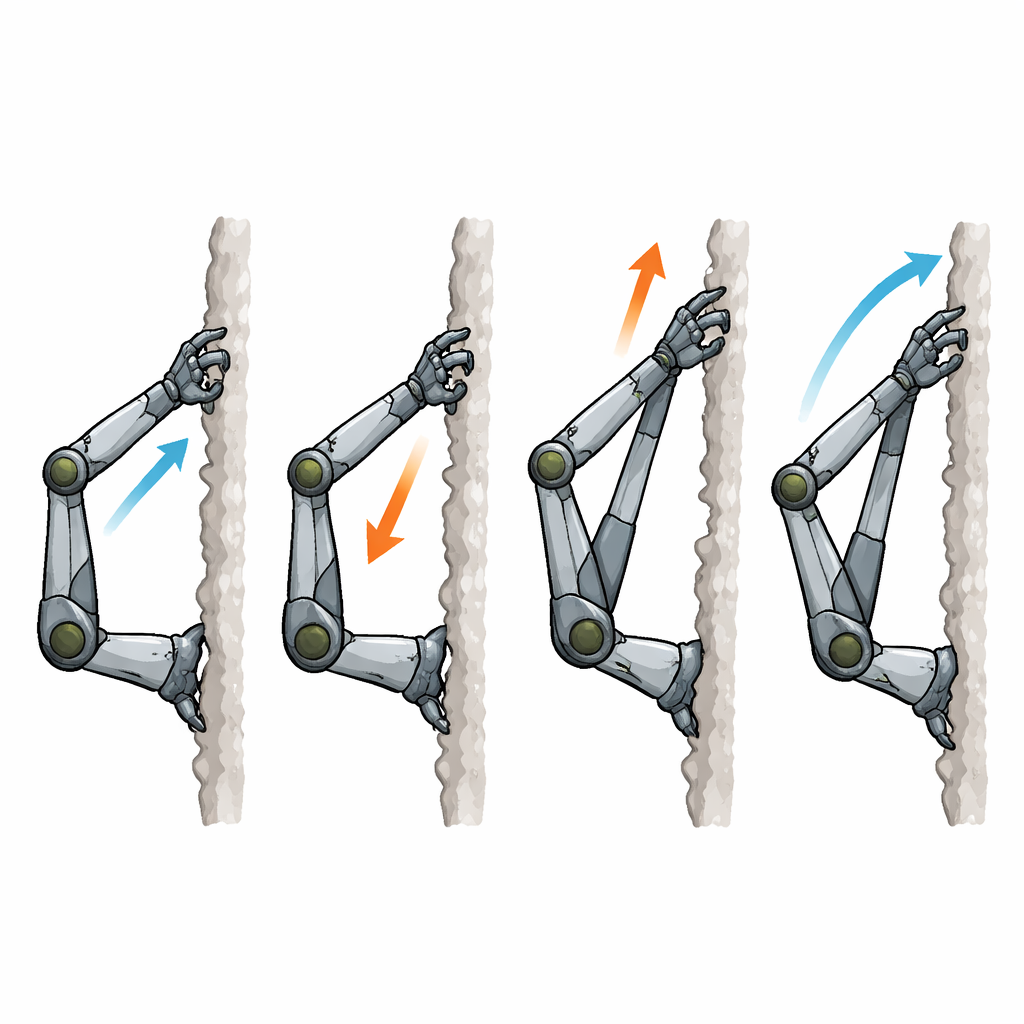
Robotun gövdesi ve bacakları, tasarımı basit tutarken kararlılığı artıracak şekilde özenle şekillendirildi. Dört bacağın her biri yalnızca üç hareketli ekleme sahip ve bunlar bir paralelkenar düzeninde yerleştirilmiş, böylece bacak sallandıkça gövde duvara çok yakın kalıyor. Bu düzen, robotun ağırlık merkezini yüzeye yakın tutmaya yardımcı oluyor; bu da geriye devrilme ve düşme eğilimini azaltıyor. Gövde kendisi, ön ve arka yarılara ayrılmış ve her iki tarafta yaylar bulunan döner bir eklemle bağlanmış. Geckolardan esinlenen bu esnek “omurga”, robotun tırmanırken hafifçe bükülmesine izin vererek kuvvetleri ayaklara daha eşit dağıtıyor ve tüm pençelerin düzensiz zeminde de etkin kalmasına yardımcı oluyor.
Yükü Paylaşan Pençeler
Kavrama ayağı tasarımın kalbidir. Düz bir ped veya sadece iki karşı pençe yerine, her ayakta bir yay boyunca sıralanmış yedi küçük çelik balık kancası bulunuyor. Her kanca kendi kanalına oturuyor ve arkasında bir yay var, böylece komşularına çarpmadan biraz kayıp dönebilir. Ayak pürüzlü bir duvara bastığında, bazı kancalar doğal olarak çıkıntılara veya çatlaklara tutunur; diğerleri kaçırabilir, ama bu sorun olmaz. Yükü çok sayıda kancaya yayarak, ayak yerleştirme hatalarına ve duvar yüzeyindeki değişimlere tolerans gösterirken yaklaşık 2,5 kilograma kadar taşıma sağlayabiliyor. Hayati olarak, kancalar ile duvar arasındaki mekanik kilitlenme pasif—bir kez kilitlendiğinde, motorlar güç kaybetse bile robot bağlı kalmaya devam edebiliyor.
Dikkatli Bir Tırmanma Dansı
Bu donanımı akıcı bir harekete dönüştürmek için ekip, bacak hareket desenini bir geckonun çapraz yürüyüşüne benzeterek programladı. Her an iki zıt bacak robotu desteklerken diğer iki bacak kalkıp ileriye savruluyor ve duvarda biraz daha yüksekte yeniden tutunuyor. Her hareket eden bacakta aynı anda yalnızca bir eklem aktif, bu da kontrolü basitleştiriyor ve istenmeyen yana kayma olasılığını azaltıyor. Araştırmacılar ayrıca her bacağın hareketinin matematiksel bir tanımını geliştirdiler ve bunu bilgisayar simülasyonlarıyla doğruladılar, ardından bu öngörüleri gerçek dünya ölçümleriyle karşılaştırdılar. Farklar sadece birkaç yüzde puanı civarındaydı; bu da basitleştirilmiş modelin kolun gerçek davranışını yakaladığını doğruluyor.
Tırmanıcıyı Test Etmeye Koymak
Parçaları bilgisayar destekli yazılımla tasarladıktan sonra ekip, gövdeyi ve bacakları hafif plastiklerle 3D yazdırdı ve üzerine on iki küçük servo motor ile bir mikrodenetleyici ekledi. Tamamlanmış robot yaklaşık 1,8 kilogram ağırlığında ve yaklaşık yarım metre uzunluğunda. 75 derecelik eğime sahip amaç için yapılmış pürüzlü bir duvarda yapılan testler, robotun iki metreyi 93 yüzde başarı oranıyla tekrar tekrar tırmanabildiğini ve dakikada 20–60 santimetre hızla hareket ettiğini gösterdi. Daha dik bir 85 derecelik yüzeyde bile yüksek bir başarı oranını korudu. Her zaman iki bacak yerine kancalanmış durumda olduğu ve pençeler vantuz veya güç gerektirmeden duvara kilitlendiği için robot uzun süre güvenle asılı kalabiliyor; bu, denetim, izleme veya arama-kurtarma görevleri için bir avantaj sağlıyor.
Bu Neden Önemli
Duvarlara yapışmanın tamamen yeni bir yolunu icat etmek yerine, bu çalışma hayvanların tırmanmadaki bilinen fikirlerini akıllıca bir araya getirerek pratik bir makine ortaya koyuyor. Geckoya benzeyen vücut duruşu robotu yüzeye yakın ve dengeli tutarken, kedi benzeri çoklu pençeli ayak pürüzlü zeminde güçlü ve arızaya dayanıklı bir kavrama sağlıyor. 3D yazdırma yapısı ve ölçülü motor sayısı sayesinde sonuç, birçok önceki duvar tırmanma robotuna kıyasla daha hafif, mekanik olarak daha basit ve daha enerji verimli, aynı zamanda faydalı yükler taşıyabilecek yetenekte. Uzman olmayanlar için temel mesaj şudur: doğanın kuvvetleri nasıl dağıttığını ve dengeyi nasıl koruduğunu kopyalayarak mühendisler, insanların yapmak zorunda kalmayacağı tehlikeli dik işleri sessiz ve güvenilir bir şekilde yapabilen robotlar inşa edebiliyor.
Atıf: Jodah, M.K., Rashid, M.T., Abdulaali, A.H. et al. Biomimetic climbing robot design inspired by geckos and cats for rough wall applications. Sci Rep 16, 12680 (2026). https://doi.org/10.1038/s41598-026-41880-x
Anahtar kelimeler: tırmanma robotları, biomimetik tasarım, gecko esinli robotik, pürüzlü yüzey muayenesi, çoklu pençe kavrama