Clear Sky Science · ar
تصميم روبوت متسلق مستوحى من الحرباء والقطط لتطبيقات الجدران الخشنة
روبوتات تتسلق حيث لا ينبغي للناس أن يتسلقوا
تفتيش المباني الشاهقة أو المنحدرات أو المنشآت الصناعية يشكل خطراً ويستغرق وقتاً ويكلف كثيراً العمال البشر. تقدم هذه الورقة روبوتاً صغيراً رباعي الأرجل يمكنه تسلق الجدران الخشنة بطريقة تشبه الحرباء أو القطة، مستخدماً مخالب معقوفة بدلاً من أكواب الشفط أو المغناطيسات. مبني من أجزاء مطبوعة ثلاثية الأبعاد خفيفة الوزن ومتحكم فيه بمجموعة بسيطة من المحركات، صُمم الروبوت للالتصاق بإحكام على أسطح غير منتظمة تشبه الخرسانة، وحتى عند انقطاع الطاقة يبقى ملتصقاً، مما يوفر وسيلة أكثر أماناً للوصول إلى أماكن يصعب أو يكون من الخطر على البشر الوصول إليها.

التعلم من الحرباء والقطط
تعتمد العديد من الروبوتات المتسلقة على الزجاج الأملس أو المغناطيسات القوية أو وسادات الشفط الضخمة، وهذا يحد من الأماكن التي يمكنها الوصول إليها. راقب المؤلفون بدلاً من ذلك كيفية تسلق الحرباء والقطط طبيعياً. تبقي الحرباء أجسامها قريبة جداً من الحائط وتحرِّك أرجلها في حركة مائلة «زاحفة»، محافظةً دائماً على ارتباط قدمين على الأقل. تستخدم القطط مخالب منحنية تُعلّق في اللحاء أو الصخر. يمزج الروبوت الجديد بين هاتين الفكرتين: جسده الطويل والمنخفض وحركة الساقين تعكس وضعية الحرباء، بينما تنتهي أقدامه بسطر مقوس مكوَّن من سبع خطاطيف فولاذية تعمل كمخالب القطة على الحجر الخشن أو الخرسانة. تتيح هذه الإلهامات البيولوجية للروبوت الإمساك دون مضخات أو مراوح أو أنظمة التصاق معقدة أخرى.
هيكل مصمم للتشبث
شكل إطار الروبوت وأرجله بعناية لزيادة الاستقرار مع الحفاظ على بساطة التصميم. تحتوي كل من الأرجل الأربعة على ثلاثة مفاصل متحركة فقط، مرتبة في متوازي أضلاع بحيث يبقى الجسم قريباً جداً من الحائط أثناء تأرجح الساق. تساعد هذه البنية في إبقاء مركز ثقل الروبوت قرب السطح، مما يقلل من ميله للانقلاب إلى الخلف والسقوط. ينقسم الجسم نفسه إلى نصفين أمامي وخلفي مرتبطين بمفصل دوَّار مزوَّد بنوابض على كلا الجانبين. هذا «العمود الفقري» المرن، المستوحى من الحرباء، يسمح للروبوت بالانحناء قليلاً أثناء التسلق، موزعاً القوى بشكل أكثر توازناً عبر أقدامه ومساعداً على إبقاء كل المخالب متصلة على التضاريس غير المستوية.
مخالب توزع الحمولة
القدم القابضة هي جوهر التصميم. بدلاً من وسادة مسطحة أو مخلبين متقابلين فقط، تحمل كل قدم سبع خطاطيف صيد فولاذية صغيرة مرتبة على قوس. يجلس كل خطاف في أخدود خاص به مع نابض خلفه، بحيث يمكنه الانزلاق والدوران قليلاً دون الاصطدام بجيرانه. عندما تضغط القدم على حائط خشن، تجد بعض الخطاطيف بشكل طبيعي نتوءات أو تشققات لتتعلق بها؛ وقد تفشل أخرى في الالتقاط، لكن ذلك مقبول. عن طريق توزيع الحمل عبر العديد من الخطاطيف، يمكن للقدم أن تحمل ما يصل إلى حوالي 2.5 كيلوجرام مع تحمل أخطاء صغيرة في وضعية التثبيت وتفاوتات في سطح الحائط. والأهم أن التداخل الميكانيكي بين الخطاطيف والحائط سلبي — بمجرد الارتباط، يمكن للروبوت البقاء ملتصقاً حتى لو فقدت المحركات الطاقة.
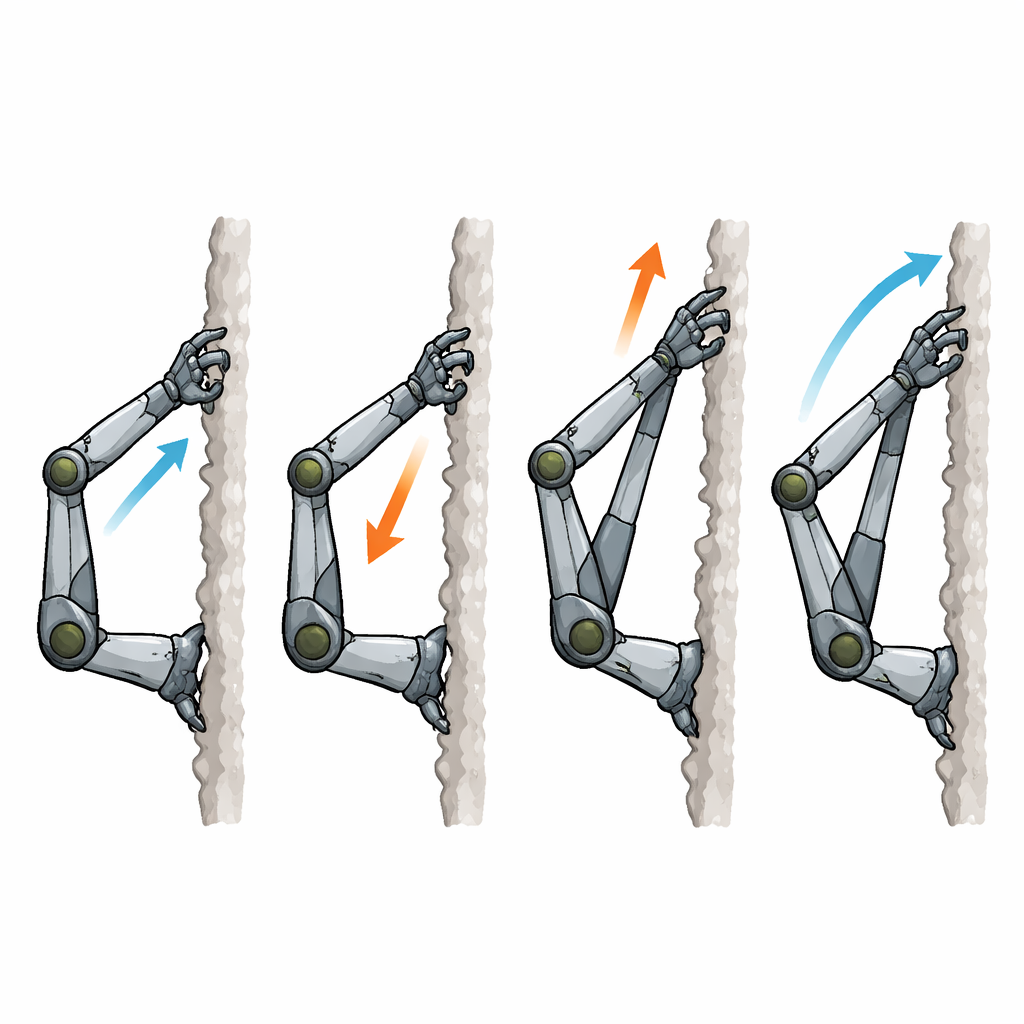
رقصة تسلق حذرة
لتحويل هذا العتاد إلى حركة سلسة، برمج الفريق نمط حركة للساق مستوحى من خطوة الحرباء المائلة. في أي لحظة، تدعم ساقان متقابلتان الروبوت بينما ترفع الاخريان وتتأرجحان إلى الأمام وتعاودان الالتصاق أعلى قليلاً على الحائط. يتنشط مفصل واحد فقط في كل ساق متحركة في كل مرة، مما يبسط التحكم ويقلل فرصة الانزلاقات الجانبية غير المرغوبة. كما وضع الباحثون وصفاً رياضياً لحركة كل ساق وفحصوه بمحاكاة حاسوبية، ثم قارنوا تلك التوقعات بقياسات العالم الحقيقي. كانت الفروقات فقط بضعة بالمئات، مما يؤكد أن النموذج المبسط يلتقط كيفية تصرف الذراع فعلياً.
اختبار المتسلق
بعد تصميم الأجزاء في برمجيات التصميم بمساعدة الحاسوب، قام الفريق بطباعة الجسم والأرجل ثلاثية الأبعاد باستخدام بلاستيكات خفيفة وأضاف اثني عشر محرك سيرفو صغيراً بالإضافة إلى متحكم دقيق. يزن الروبوت النهائي حوالي 1.8 كيلوجرام ويبلغ طوله نحو نصف متر. أظهرت الاختبارات على جدار خشن مصمم خصيصاً ومائل بزاوية 75 درجة أن الروبوت يمكنه صعود مترين مراراً بمعدل نجاح 93 بالمئة، ويتحرك بسرعة تتراوح بين 20 إلى 60 سنتيمتراً في الدقيقة. حتى على سطح أكثر انحداراً بزاوية 85 درجة، حافظ على معدل نجاح مرتفع. وبما أن ساقين دائماً متعلقتان والمخالب تقفل في الحائط دون الحاجة لشفط أو طاقة، يمكن للروبوت أن يبقى معلقاً بأمان لفترات طويلة، ما يشكل ميزة للمهام مثل التفتيش أو المراقبة أو البحث والإنقاذ.
لماذا هذا مهم
بدلاً من اختراع طريقة جديدة تماماً للالتصاق بالجدران، يجمع هذا العمل بذكاء أفكاراً معروفة من تسلق الحيوانات في آلة عملية. تحافظ وضعية الجسم الشبيهة بالحرباء على قرب الروبوت من السطح واستقراره، بينما توفر القدم متعددة المخالب على طريقة القطة إمساكاً قوياً وآمناً على التضاريس الخشنة. وبفضل التصنيع بالطباعة ثلاثية الأبعاد وعدد محدود من المحركات، النتيجة أخف وزناً وأكثر بساطة ميكانيكياً وأكثر كفاءة في استهلاك الطاقة من العديد من الروبوتات المتسلقة السابقة، ومع ذلك قادرة على حمل حمولات مفيدة. للقراء غير المتخصصين، الرسالة الأساسية هي أنه عبر تقليد كيفية توزيع الطبيعة للقوى والحفاظ على التوازن، يمكن للمهندسين بناء روبوتات تقوم بهدوء وبثقة بأعمال رأسية خطرة حتى لا يضطر البشر للقيام بها.
الاستشهاد: Jodah, M.K., Rashid, M.T., Abdulaali, A.H. et al. Biomimetic climbing robot design inspired by geckos and cats for rough wall applications. Sci Rep 16, 12680 (2026). https://doi.org/10.1038/s41598-026-41880-x
الكلمات المفتاحية: روبوتات متسلقة, تصميم محاكي للأحياء, روبوتات مستوحاة من الحرباء, فحص الأسطح الخشنة, تثبيت متعدد المخالب