Clear Sky Science · fr
Conception d’un robot grimpeur biomimétique inspiré des geckos et des chats pour des applications sur parois rugueuses
Des robots qui grimpent là où les humains ne devraient pas aller
Inspecter des bâtiments élevés, des falaises ou des structures industrielles est dangereux, lent et coûteux pour les opérateurs humains. Cet article présente un petit robot à quatre pattes capable de grimper des parois rugueuses à la manière d’un gecko ou d’un chat, en utilisant des griffes crochues au lieu de ventouses ou d’aimants. Construit à partir de pièces légères imprimées en 3D et commandé par un jeu simple de moteurs, le robot est conçu pour s’accrocher solidement à des surfaces irrégulières de type béton, même lorsque l’alimentation est coupée, offrant un moyen plus sûr d’atteindre des endroits difficiles ou dangereux pour les personnes.

Apprendre des geckos et des chats
Beaucoup de robots grimpeurs dépendent de surfaces vitrées lisses, d’aimants puissants ou de larges ventouses, ce qui limite leurs déplacements. Les auteurs ont plutôt observé comment les geckos et les chats grimpent naturellement. Les geckos gardent leur corps très près de la paroi et déplacent leurs pattes selon une « marche diagonale », en gardant toujours au moins deux pieds attachés. Les chats utilisent des griffes courbées qui s’accrochent à l’écorce ou à la roche. Le nouveau robot combine ces idées : son corps long et bas et la cinématique de ses pattes rappellent la posture d’un gecko, tandis que ses pieds se terminent par une rangée arquée de sept crochets en acier qui fonctionnent comme les griffes d’un chat sur la pierre ou le béton rugueux. Cette inspiration biologique permet au robot de s’agripper sans pompes, ventilateurs ou autres systèmes d’adhérence complexes.
Un corps conçu pour s’accrocher
Le châssis et les pattes du robot ont été soigneusement façonnés pour augmenter la stabilité tout en gardant la conception simple. Chacune des quatre pattes comporte seulement trois articulations mobiles, disposées en parallélogramme de sorte que le corps reste très près de la paroi lorsque la patte se balance. Cette disposition aide à maintenir le centre de gravité du robot proche de la surface, ce qui réduit la tendance à basculer vers l’arrière et à tomber. Le corps lui-même est divisé en deux moitiés avant et arrière reliées par une liaison tournante avec des ressorts de chaque côté. Cette « colonne vertébrale » flexible, inspirée des geckos, permet au robot de se courber légèrement en grimpant, répartissant les forces plus uniformément sur ses pieds et aidant toutes les griffes à rester engagées sur un terrain irrégulier.
Des griffes qui partagent la charge
Le pied de préhension est au cœur de la conception. Au lieu d’une semelle plate ou de seulement deux griffes opposées, chaque pied porte sept petits crochets de pêche en acier disposés le long d’un arc. Chaque crochet se loge dans sa propre rainure avec un ressort derrière lui, de sorte qu’il peut glisser et pivoter un peu sans heurter ses voisins. Lorsque le pied presse contre une paroi rugueuse, certains crochets trouvent naturellement des aspérités ou des fissures pour s’accrocher ; d’autres peuvent manquer leur prise, mais cela reste acceptable. En répartissant la charge sur de nombreux crochets, le pied peut supporter environ 2,5 kilogrammes tout en tolérant de petites erreurs de placement et des variations de la surface. De manière cruciale, l’emboîtement mécanique des crochets et de la paroi est passif : une fois engagé, le robot peut rester attaché même si les moteurs perdent leur puissance.
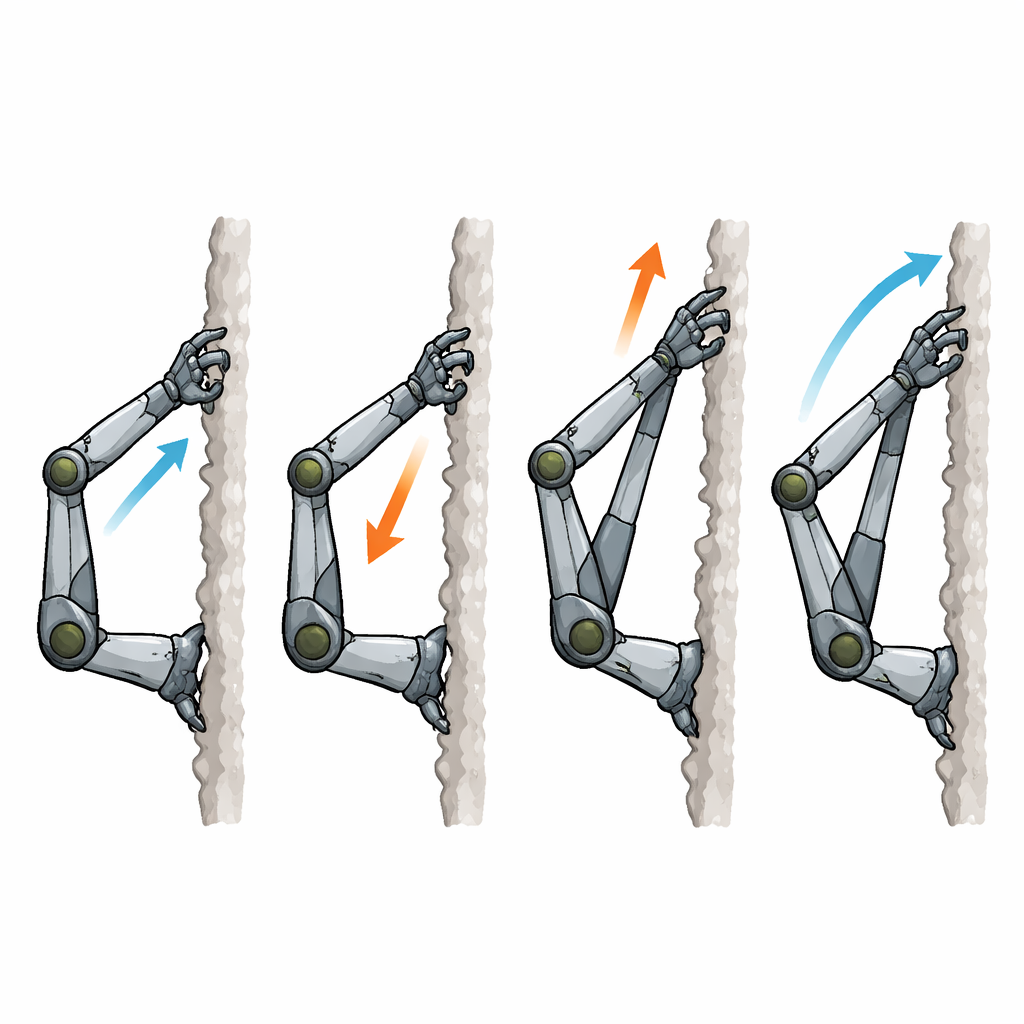
Une danse d’escalade soigneusement orchestrée
Pour transformer ce matériel en un mouvement fluide, l’équipe a programmé un schéma de déplacement des pattes calqué sur la démarche diagonale d’un gecko. À tout instant, deux pattes opposées soutiennent le robot tandis que les deux autres se lèvent, balancent vers l’avant et se réattachent un peu plus haut sur la paroi. Une seule articulation de chaque patte en mouvement est active à la fois, ce qui simplifie le contrôle et réduit le risque de déplacements latéraux indésirables. Les chercheurs ont également développé une description mathématique du mouvement de chaque patte et l’ont vérifiée par des simulations informatiques, puis comparée aux mesures réelles. Les écarts n’étaient que de quelques pourcents, confirmant que le modèle simplifié capture le comportement réel du bras.
Soumettre l’alpiniste à l’épreuve
Après avoir conçu les pièces dans un logiciel d’assistance, l’équipe a imprimé en 3D le corps et les pattes en plastiques légers et ajouté douze petits servomoteurs ainsi qu’un microcontrôleur. Le robot fini pèse environ 1,8 kilogramme et mesure à peu près un demi-mètre de long. Des essais sur une paroi rugueuse conçue à cet effet et inclinée à 75 degrés ont montré que le robot pouvait grimper de façon répétée sur deux mètres avec un taux de réussite de 93 %, se déplaçant à 20–60 centimètres par minute. Même sur une surface plus raide à 85 degrés, il a maintenu un taux de réussite élevé. Comme deux pattes sont toujours accrochées et que les griffes se verrouillent dans la paroi sans besoin d’aspiration ni d’alimentation, le robot peut rester suspendu en sécurité pendant de longues périodes, un avantage pour l’inspection, la surveillance ou les missions de recherche et sauvetage.
Pourquoi c’est important
Plutôt que d’inventer une toute nouvelle manière de coller aux murs, ce travail combine intelligemment des idées connues du monde animal en une machine pratique. Une posture proche de la surface à la manière d’un gecko maintient le robot stable, tandis qu’un pied multi-griffes façon chat fournit une préhension forte et sans défaillance sur un terrain rugueux. Grâce à la fabrication par impression 3D et à un nombre modeste de moteurs, le résultat est plus léger, mécaniquement plus simple et plus économe en énergie que nombre de robots grimpeurs antérieurs, tout en étant capable de transporter des charges utiles. Pour le grand public, le message clé est que, en copiant la façon dont la nature répartit les forces et maintient l’équilibre, les ingénieurs peuvent construire des robots qui accomplissent discrètement et de façon fiable des travaux verticaux dangereux afin que les humains n’aient pas à le faire.
Citation: Jodah, M.K., Rashid, M.T., Abdulaali, A.H. et al. Biomimetic climbing robot design inspired by geckos and cats for rough wall applications. Sci Rep 16, 12680 (2026). https://doi.org/10.1038/s41598-026-41880-x
Mots-clés: robots grimpeurs, conception biomimétique, robotique inspirée des geckos, inspection de surfaces rugueuses, préension multi-griffes