Clear Sky Science · pt
Projeto de robô escalador biomimético inspirado em lagartos e gatos para aplicações em paredes rugosas
Robôs que sobem onde pessoas não deveriam
Inspecionar prédios altos, penhascos ou estruturas industriais é perigoso, lento e caro para trabalhadores humanos. Este artigo apresenta um pequeno robô de quatro patas que pode escalar paredes rugosas de forma semelhante a um geco ou a um gato, usando garras em vez de ventosas ou ímãs. Construído com peças leves impressas em 3D e controlado por um conjunto simples de motores, o robô foi projetado para se prender com segurança a superfícies irregulares parecidas com concreto, mesmo quando a energia é cortada, oferecendo uma maneira mais segura de alcançar locais que são difíceis ou perigosos para pessoas.

Aprendendo com gecos e gatos
Muitos robôs escaladores dependem de vidro liso, ímãs fortes ou almofadas de sucção volumosas, o que limita onde podem operar. Os autores, em vez disso, observaram como gecos e gatos sobem naturalmente. Gecos mantêm o corpo muito próximo à parede e movem as pernas em um “rastreamento” diagonal, sempre mantendo ao menos dois pés presos. Gatos usam garras curvadas que se engancham em cascas ou rochas. O novo robô mistura essas ideias: seu corpo longo e baixo e o movimento das pernas lembram a postura de um geco, enquanto seus pés terminam em uma fileira arqueada de sete ganchos de aço que funcionam como as garras de um gato em pedra ou concreto rugoso. Essa inspiração biológica permite ao robô se agarrar sem bombas, ventiladores ou outros sistemas complexos de adesão.
Um corpo feito para se agarrar
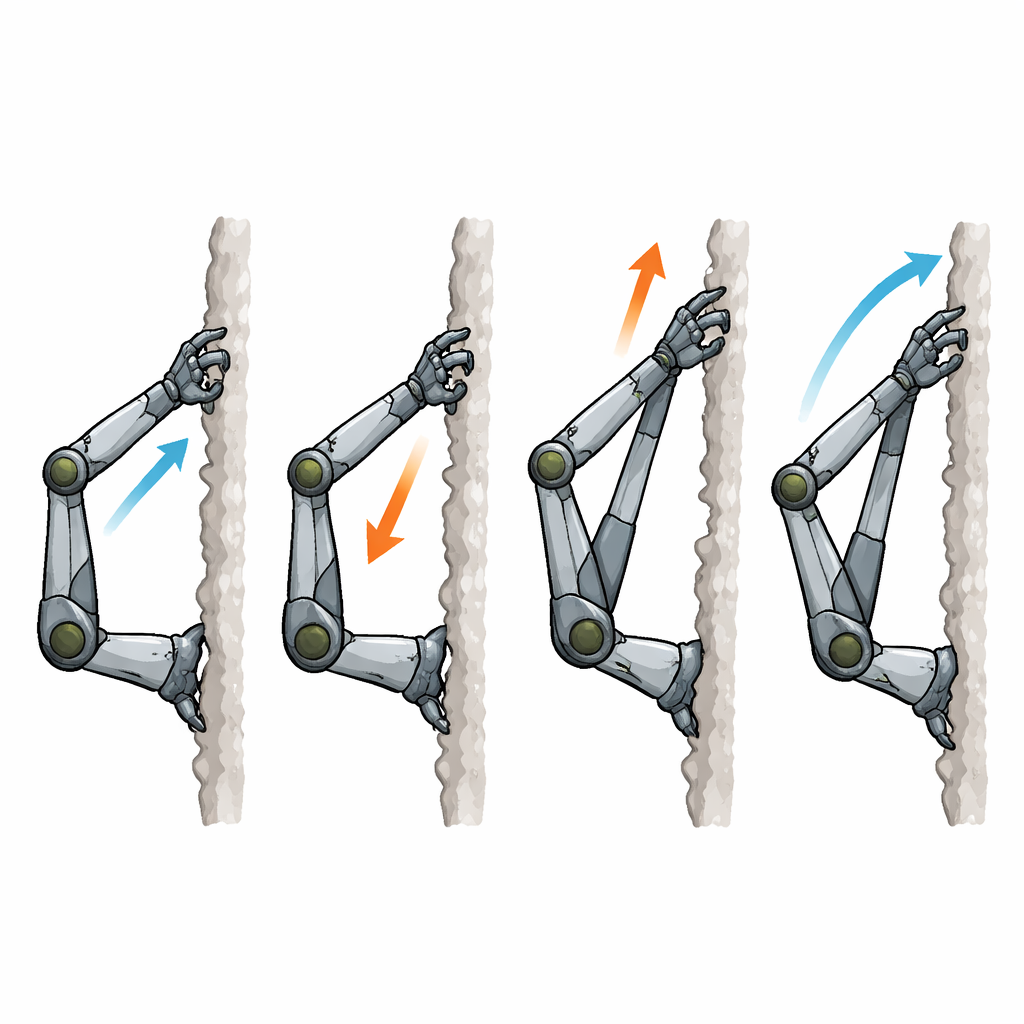
A estrutura e as pernas do robô foram cuidadosamente moldadas para aumentar a estabilidade mantendo o design simples. Cada uma das quatro pernas tem apenas três juntas móveis, dispostas em um paralelogramo para que o corpo permaneça muito próximo à parede enquanto a perna se movimenta. Essa configuração ajuda a manter o centro de gravidade do robô perto da superfície, o que reduz a tendência de tombar para trás e cair. O corpo em si é dividido em metades dianteira e traseira ligadas por uma junta rotativa com molas em ambos os lados. Essa “coluna” flexível, inspirada em gecos, permite que o robô se dobre ligeiramente enquanto escala, distribuindo as forças de modo mais uniforme pelas patas e ajudando todas as garras a permanecerem engajadas em terreno irregular.
Garras que compartilham a carga
O pé de agarre é o coração do projeto. Em vez de uma almofada plana ou apenas duas garras opostas, cada pé carrega sete pequenos ganchos de pesca de aço dispostos ao longo de um arco. Cada gancho fica em sua própria ranhura com uma mola atrás, de modo que pode deslizar e girar um pouco sem bater nos vizinhos. Quando o pé pressiona contra uma parede rugosa, alguns ganchos naturalmente encontram saliências ou rachaduras para se agarrar; outros podem não encontrar, mas isso é aceitável. Ao distribuir a carga por muitos ganchos, o pé pode sustentar até cerca de 2,5 quilogramas enquanto tolera pequenos erros de posicionamento e variações da superfície. Crucialmente, o entrelaçamento mecânico entre ganchos e parede é passivo—uma vez engajado, o robô pode permanecer preso mesmo se os motores perderem energia.
Uma dança cuidadosa de escalada
Para transformar esse conjunto mecânico em movimento suave, a equipe programou um padrão de movimento das pernas modelado no andamento diagonal de um geco. A qualquer momento, duas pernas opostas suportam o robô enquanto as outras duas se levantam, balançam para frente e se prendem um pouco mais acima na parede. Apenas uma junta em cada perna em movimento é ativada por vez, o que simplifica o controle e reduz a chance de deslocamentos laterais indesejados. Os pesquisadores também desenvolveram uma descrição matemática do movimento de cada perna e a verificaram com simulações por computador, depois compararam essas previsões com medições em situações reais. As diferenças foram de apenas alguns por cento, confirmando que o modelo simplificado captura como o braço realmente se comporta.
Testando o escalador
Depois de projetar as peças em software de auxílio por computador, a equipe imprimiu em 3D o corpo e as pernas usando plásticos leves e adicionou doze pequenos servomotores mais um microcontrolador. O robô finalizado pesa cerca de 1,8 quilograma e tem aproximadamente meio metro de comprimento. Testes em uma parede rugosa construída para o experimento, inclinada a 75 graus, mostraram que o robô conseguiu subir repetidamente dois metros com uma taxa de sucesso de 93%, movendo‑se a 20 a 60 centímetros por minuto. Mesmo em uma superfície mais íngreme de 85 graus, manteve uma alta taxa de sucesso. Como duas pernas estão sempre enganchadas e as garras travam na parede sem precisar de sucção ou energia, o robô pode ficar pendurado com segurança por longos períodos, uma vantagem para inspeção, monitoramento ou tarefas de busca e resgate.
Por que isso importa
Em vez de inventar uma maneira completamente nova de aderir a paredes, este trabalho combina de forma inteligente ideias conhecidas do ato de escalar animal em uma máquina prática. Uma postura corporal parecida com a de um geco mantém o robô próximo à superfície e estável, enquanto um pé com várias garras, à maneira de um gato, fornece uma fixação forte e à prova de falhas em terreno rugoso. Graças à construção impressa em 3D e a um número modesto de motores, o resultado é mais leve, mecanicamente mais simples e mais eficiente em energia do que muitos robôs escaladores anteriores, mas ainda capaz de transportar cargas úteis. Para não especialistas, a mensagem principal é que, ao copiar como a natureza distribui forças e mantém o equilíbrio, engenheiros podem construir robôs que realizam trabalho vertical perigoso de forma discreta e confiável para que pessoas não precisem fazê‑lo.
Citação: Jodah, M.K., Rashid, M.T., Abdulaali, A.H. et al. Biomimetic climbing robot design inspired by geckos and cats for rough wall applications. Sci Rep 16, 12680 (2026). https://doi.org/10.1038/s41598-026-41880-x
Palavras-chave: robôs escaladores, design biomimético, robótica inspirada em lagartos, inspeção de superfícies rugosas, aperto com várias garras