Clear Sky Science · nl
Biomimetisch klimmend robotontwerp geïnspireerd op gekko’s en katten voor ruwe wandtoepassingen
Robots die klimmen waar mensen dat niet zouden moeten doen
Het inspecteren van hoge gebouwen, kliffen of industriële constructies is gevaarlijk, traag en duur voor menselijke medewerkers. Dit artikel introduceert een kleine viervoetige robot die ruwe wanden kan beklimmen, vergelijkbaar met een gekko of een kat, door gebruik te maken van haakachtige klauwen in plaats van zuignappen of magneten. Gemaakt van lichtgewicht 3D-geprinte onderdelen en aangestuurd door een eenvoudig stel motoren, is de robot ontworpen om zich stevig vast te klampen aan oneffen, betonachtige oppervlakken, zelfs als de stroom uitvalt, en biedt daarmee een veiliger manier om plekken te bereiken die moeilijk of gevaarlijk zijn voor mensen.

Leren van gekko’s en katten
Veel klimmende robots zijn afhankelijk van glad glas, sterke magneten of omvangrijke zuigkussens, wat beperkingen oplegt aan hun inzetmogelijkheden. De auteurs observeerden in plaats daarvan hoe gekko’s en katten van nature klimmen. Gekko’s houden hun lichaam zeer dicht tegen de wand en bewegen hun poten in een diagonale “kruip”beweging, waarbij altijd minstens twee poten bevestigd blijven. Katten gebruiken gebogen klauwen die in schors of steen haken. De nieuwe robot combineert deze ideeën: zijn lange, lage romp en beenbewegingen weerspiegelen de houding van een gekko, terwijl de voeten eindigen in een gebogen rij van zeven stalen haakjes die werken als de klauwen van een kat op ruw steen of beton. Deze biologische inspiratie stelt de robot in staat zich vast te grijpen zonder pompen, ventilatoren of andere complexe adhesiesystemen.
Een lichaam gebouwd om zich vast te klampen
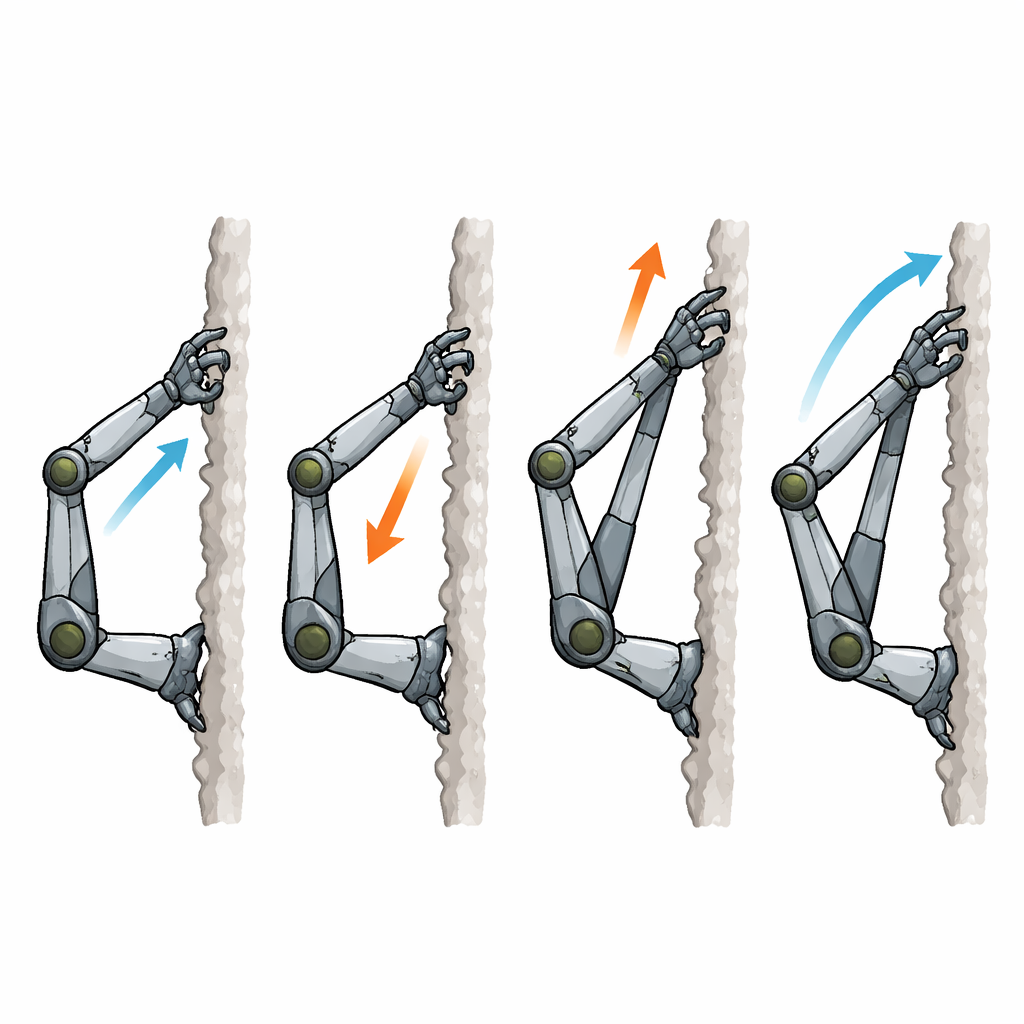
Het frame en de poten van de robot zijn zorgvuldig gevormd om de stabiliteit te vergroten terwijl het ontwerp eenvoudig blijft. Elk van de vier poten heeft slechts drie beweegbare gewrichten, gerangschikt in een parallellogram zodat het lichaam zeer dicht bij de wand blijft terwijl de poot zwaait. Deze opstelling helpt het zwaartepunt van de robot dicht bij het oppervlak te houden, wat de neiging om naar achteren te kantelen en te vallen vermindert. Het lichaam zelf is opgesplitst in een voor- en achterhelft die met een roterend scharnier en veren aan beide zijden verbonden zijn. Deze flexibele “ruggengraat”, geïnspireerd door gekko’s, laat de robot licht buigen tijdens het klimmen, waardoor krachten gelijkmatiger over de voeten worden verdeeld en alle klauwen beter contact houden op oneffen terrein.
Klauwen die de last verdelen
De grijpende voet is het hart van het ontwerp. In plaats van een vlak kussen of slechts twee tegenovergestelde klauwen draagt elke voet zeven kleine stalen vishaakjes gerangschikt langs een boog. Elk haakje zit in zijn eigen groef met een veer erachter, zodat het een beetje kan schuiven en roteren zonder tegen de buren te botsen. Wanneer de voet tegen een ruwe wand drukt, vinden sommige haakjes vanzelf hobbels of scheuren om zich aan vast te haken; anderen missen mogelijk, maar dat is acceptabel. Door de belasting over vele haakjes te spreiden, kan de voet ongeveer 2,5 kilogram dragen terwijl kleine fouten in plaatsing en variaties in het wandoppervlak worden getolereerd. Cruciaal is dat de mechanische vergrendeling tussen haakjes en wand passief is—eenmaal ingegrepen kan de robot vast blijven zitten, zelfs als de motoren geen stroom meer hebben.
Een zorgvuldig klimdansje
Om deze hardware in vloeiende beweging om te zetten, programmeerde het team een beenbewegingpatroon gemodelleerd naar de diagonale gang van een gekko. Op elk moment ondersteunen twee tegenovergestelde poten de robot terwijl de andere twee optillen, naar voren zwaaien en iets hoger op de wand opnieuw vastmaken. Slechts één gewricht in elk bewegend been is op een gegeven moment actief, wat de aansturing vereenvoudigt en de kans op ongewenste zijwaartse verschuivingen verkleint. De onderzoekers ontwikkelden ook een wiskundige beschrijving van de beweging van elk been en controleerden die met computersimulaties, waarna ze die voorspellingen vergeleken met metingen in de echte wereld. De verschillen waren slechts enkele procenten, wat bevestigt dat het vereenvoudigde model vastlegt hoe de arm zich daadwerkelijk gedraagt.
De klimmer op de proef gesteld
Nadat de onderdelen in computerondersteunde software waren ontworpen, printte het team het lichaam en de poten in 3D met lichtgewicht kunststoffen en voegde twaalf kleine servomotoren plus een microcontroller toe. De afgewerkte robot weegt ongeveer 1,8 kilogram en is ruwweg een halve meter lang. Tests op een speciaal gebouwde ruwe wand onder een hoek van 75 graden toonden aan dat de robot herhaaldelijk twee meter kon klimmen met een succespercentage van 93 procent, en een snelheid van 20 tot 60 centimeter per minuut. Zelfs op een steilere 85-graden helling behield hij een hoog succespercentage. Omdat twee poten altijd verankerd zijn en de klauwen in de wand vergrendelen zonder zuiging of stroom, kan de robot veilig langere tijd op zijn plek hangen, wat een voordeel is voor inspectie-, bewakings- of zoek- en reddingstaken.
Waarom dit ertoe doet
In plaats van een volledig nieuwe manier te bedenken om aan muren te kleven, combineert dit werk op slimme wijze bekende ideeën uit de dierlijke klimwereld in een praktische machine. Een gekko-achtige lichaamshouding houdt de robot dicht bij het oppervlak en stabiel, terwijl een katachtige meerklauwvoet sterke, fail-safe grip biedt op ruw terrein. Dankzij 3D-geprinte constructie en een bescheiden aantal motoren is het resultaat lichter, mechanisch eenvoudiger en energie-efficiënter dan veel eerdere muurklimmende robots, maar nog steeds in staat nuttige lasten te dragen. Voor niet-experts is de kernboodschap dat ingenieurs door na te bootsen hoe de natuur krachten verdeelt en balans behoudt, robots kunnen bouwen die stil en betrouwbaar gevaarlijk verticaal werk doen zodat mensen dat niet hoeven te doen.
Bronvermelding: Jodah, M.K., Rashid, M.T., Abdulaali, A.H. et al. Biomimetic climbing robot design inspired by geckos and cats for rough wall applications. Sci Rep 16, 12680 (2026). https://doi.org/10.1038/s41598-026-41880-x
Trefwoorden: klimmende robots, biomimetisch ontwerp, gekko-geïnspireerde robotica, inspectie van ruwe oppervlakken, meerkleppige grijping