Clear Sky Science · pl
Projekt biomimetycznego robota wspinającego się inspirowany gekonami i kotami do zastosowań na chropowatych ścianach
Roboty, które wspinają się tam, gdzie nie powinni ludzie
Inspekcja wysokich budynków, klifów czy konstrukcji przemysłowych jest dla ludzi niebezpieczna, powolna i kosztowna. W artykule przedstawiono małego, czteronogiego robota, który potrafi wspinać się po chropowatych ścianach podobnie jak gekon czy kot, używając zahaczających pazurów zamiast przyssawek czy magnesów. Wykonany z lekkich, drukowanych w 3D części i sterowany przez prosty zestaw silników, robot został zaprojektowany tak, aby pewnie przylegać do nierównych powierzchni przypominających beton, nawet po odcięciu zasilania, oferując bezpieczniejszy sposób dotarcia w miejsca trudne lub niebezpieczne dla ludzi.

Uczenie się od gekonów i kotów
Wiele robotów wspinających się polega na gładkim szkle, silnych magnesach czy masywnych przyssawkach, co ogranicza ich zastosowania. Autorzy zaobserwowali zamiast tego, jak gepardy... przepraszam — gekony i koty wspinają się w naturze. Gekony trzymają ciało bardzo blisko ściany i poruszają nogami w diagonalnym „pełzaniu”, zawsze mając przynajmniej dwie kończyny przyczepione. Koty używają zakrzywionych pazurów, które haczą się o korę czy skałę. Nowy robot łączy te idee: jego długie, nisko osadzone ciało i ruch kończyn przypominają postawę gekona, a stopy kończą się łukiem siedmiu stalowych haczyków działających jak pazury kota na chropowatym kamieniu czy betonie. Ta inspiracja biologiczna pozwala robotowi chwytać bez pomp, wentylatorów ani innych złożonych systemów adhezji.
Ciało stworzone do przylegania
Konstrukcja ramy i nóg robota została starannie ukształtowana, aby zwiększyć stabilność przy zachowaniu prostoty projektu. Każda z czterech nóg ma tylko trzy ruchome stawy, ułożone w równoległobok, tak aby ciało pozostawało bardzo blisko ściany podczas zamachu nogi. Takie rozmieszczenie pomaga utrzymać środek ciężkości blisko powierzchni, co zmniejsza tendencję do przechylania się do tyłu i upadku. Sam korpus jest podzielony na przednią i tylną połowę połączone obrotowym przegubem ze sprężynami po obu stronach. Ta elastyczna „kręgosłupowa” konstrukcja, inspirowana gekonami, pozwala robotowi lekko się zginać podczas wspinaczki, równomierniej rozkładając siły na stopach i pomagając wszystkim pazurkom pozostawać zaangażowanymi na nierównym terenie.
Pazury, które dzielą obciążenie
Stopa chwytna jest sercem projektu. Zamiast płaskiej podkładki czy zaledwie dwóch przeciwstawnych pazurów, każda stopa ma siedem małych stalowych haczyków do wędkowania ułożonych wzdłuż łuku. Każdy haczyk siedzi we własnym rowku ze sprężyną za nim, dzięki czemu może się nieco przesuwać i obracać bez zderzania z sąsiadami. Gdy stopa naciska na chropowatą ścianę, niektóre haczyki naturalnie odnajdują wybrzuszenia lub pęknięcia, za które mogą się zahaczyć; inne mogą nie trafić, i to jest dopuszczalne. Poprzez rozłożenie obciążenia na wiele haczyków stopa może utrzymać do około 2,5 kilograma, tolerując drobne błędy w umiejscowieniu i zróżnicowanie powierzchni. Co istotne, mechaniczne zazębianie haczyków ze ścianą jest pasywne — po zaciśnięciu robot może pozostać przyczepiony nawet przy braku zasilania.
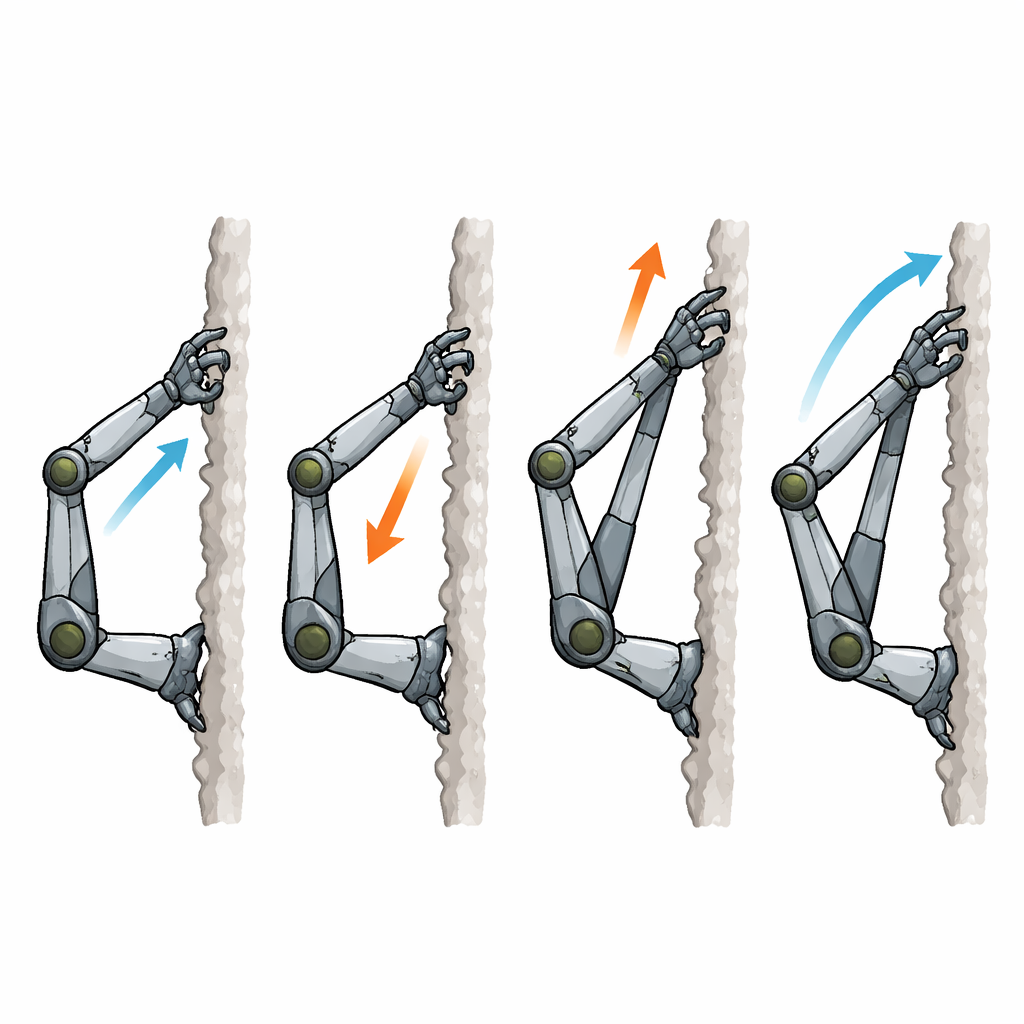
Uważny taniec wspinaczkowy
Aby przekształcić ten sprzęt w płynny ruch, zespół zaprogramował wzorzec ruchu nóg wzorowany na diagonalnym chodzie gekona. W danym momencie dwie przeciwległe nogi podpierają robota, podczas gdy pozostałe dwie unoszą się, wymachują do przodu i ponownie zaczepiają nieco wyżej na ścianie. W każdej poruszającej się nodze aktywny jest tylko jeden staw naraz, co upraszcza sterowanie i zmniejsza ryzyko niepożądanych bocznych przesunięć. Badacze opracowali też matematyczny opis ruchu każdej nogi i zweryfikowali go symulacjami komputerowymi, a następnie porównali prognozy z pomiarami w rzeczywistości. Różnice wynosiły zaledwie kilka procent, co potwierdziło, że uproszczony model oddaje rzeczywiste zachowanie mechanizmu.
Testy wspinacza
Po zaprojektowaniu części w oprogramowaniu CAD zespół wydrukował korpus i nogi w 3D z lekkich tworzyw sztucznych i dodał dwanaście małych serwomechanizmów oraz mikrokontroler. Gotowy robot waży około 1,8 kilograma i ma mniej więcej pół metra długości. Testy na specjalnie przygotowanej chropowatej ścianie nachylonej pod kątem 75 stopni wykazały, że robot może wielokrotnie wspiąć się na dwa metry z odsetkiem sukcesu 93 procent, poruszając się z prędkością 20–60 centymetrów na minutę. Nawet na bardziej stromym kącie 85 stopni utrzymywał wysoki współczynnik powodzenia. Ponieważ dwie nogi zawsze są zahaczone, a pazurki blokują się w ścianie bez potrzeby użycia przyssawek czy zasilania, robot może bezpiecznie wisieć w miejscu przez dłuższy czas — to zaleta przy inspekcji, monitorowaniu czy akcjach poszukiwawczo‑ratowniczych.
Dlaczego to ma znaczenie
Zamiast wynajdywać zupełnie nowy sposób przyczepiania do ścian, ta praca mądrze łączy znane rozwiązania ze świata zwierząt w praktyczną maszynę. Postawa przypominająca gekona utrzymuje robota blisko powierzchni i stabilnym, natomiast wielopazurkowa stopa typu kociego zapewnia mocny, bezawaryjny chwyt na chropowatym terenie. Dzięki konstrukcji z drukowanych części i umiarkowanej liczbie silników rezultat jest lżejszy, mechanicznie prostszy i bardziej energooszczędny niż wiele wcześniejszych robotów wspinających się po ścianach, a jednocześnie zdolny do przenoszenia przydatnych ładunków. Dla laików kluczowy wniosek jest taki, że kopiując sposób, w jaki natura rozkłada siły i utrzymuje równowagę, inżynierowie mogą zbudować roboty, które cicho i niezawodnie wykonują niebezpieczną pionową pracę, tak aby ludzie nie musieli tego robić.
Cytowanie: Jodah, M.K., Rashid, M.T., Abdulaali, A.H. et al. Biomimetic climbing robot design inspired by geckos and cats for rough wall applications. Sci Rep 16, 12680 (2026). https://doi.org/10.1038/s41598-026-41880-x
Słowa kluczowe: roboty wspinające się, projekt biomimetyczny, roboty inspirowane gekonami, inspekcja chropowatych powierzchni, uchwyt wielopolczasty