Clear Sky Science · zh
用改进约束差分进化算法优化区间二型模糊逻辑PID控制器
赋予机器人更聪明的“肌肉”
会行走、跳跃并搬运重物的类人机器人通常依赖液压“肌肉”,因为与电动机相比,液压装置能在更小的体积内提供更大的功率。但要让这些液压系统平稳且精确地运动非常困难:它们的行为具有非线性、敏感且难以预测。本文提出了一种自动调优先进控制器的新方法,使类人机器人中的液压关节更加精确、更加稳定、且更易于设计。
为什么液压关节难以控制
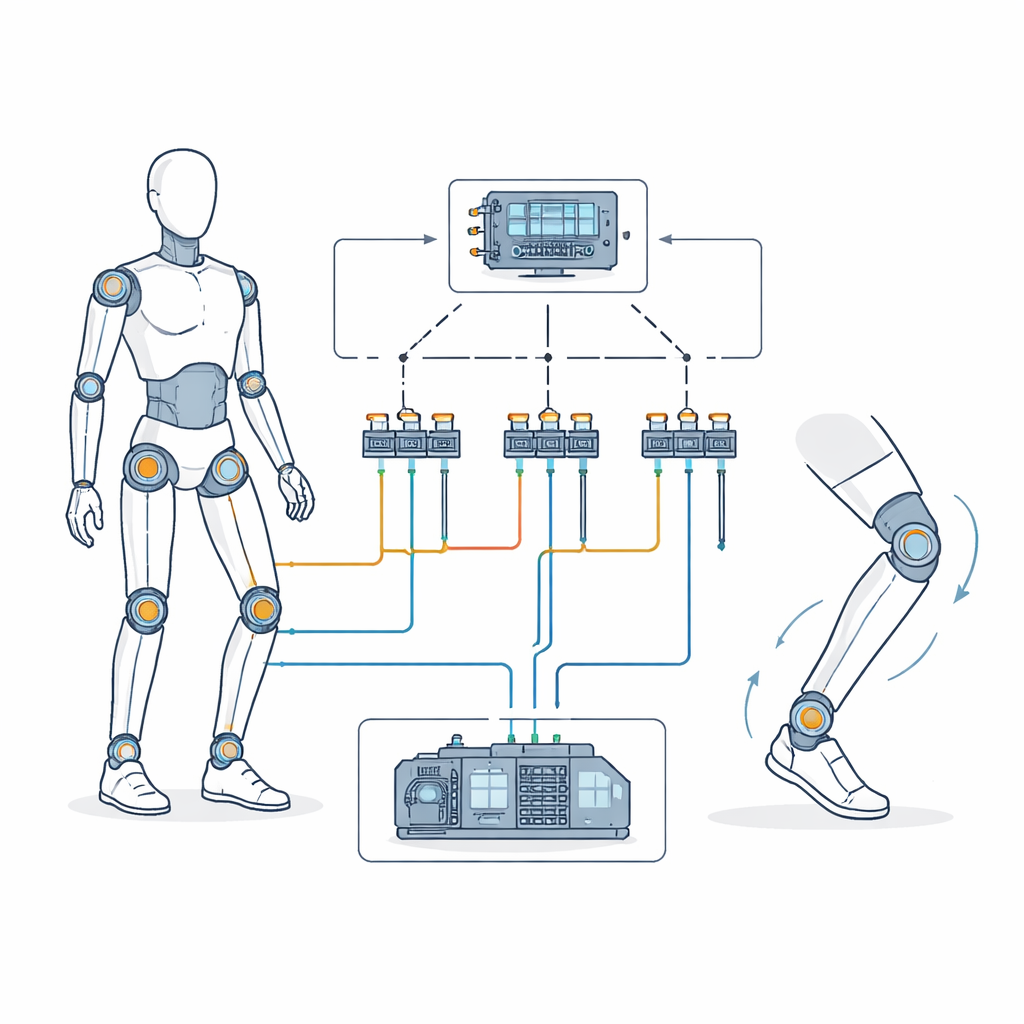
液压执行器可以通过加压油驱动的紧凑缸体输出巨大力矩。本文研究的类人机器人使用移动液压动力单元,配备泵、阀、蓄能器和冷却器,为腿部的多个缸体供油。尽管这些硬件提供了充足动力,缸体在伸出和回缩时的响应不同,而且其行为会随压力、流量和负载而变化。像熟悉的比例—积分—微分(PID)控制器这类简单控制方案假设较为线性和可预测的动力学,因此很难在不出现超调或振荡的情况下将缸体位置精准保持在目标上。作者认为,要充分发挥这些强大执行器的性能,控制逻辑必须能够直接处理不确定性和非线性。
在控制器中加入模糊思维
为应对这些复杂性,研究者构建了一个区间二型模糊逻辑PID控制器。本质上,模糊逻辑允许控制器使用更接近人类推理的规则——例如“若位置误差小但变化快,则放缓”——而区间二型模糊集进一步通过显式建模规则中的不确定性来增强鲁棒性。团队首先建立了液压缸及其电子设备的详细数学模型,涵盖传感器、伺服阀以及用于机器人踝关节和膝关节的负载。随后,他们在常规PID结构周围嵌入模糊逻辑,输入描述位置误差及其变化速率,输出用于调整控制努力。为了保持设计的可实现性,他们简化了控制器的输出形状,同时通过模糊输入规则仍允许丰富的非线性行为。
让进化算法来做调优
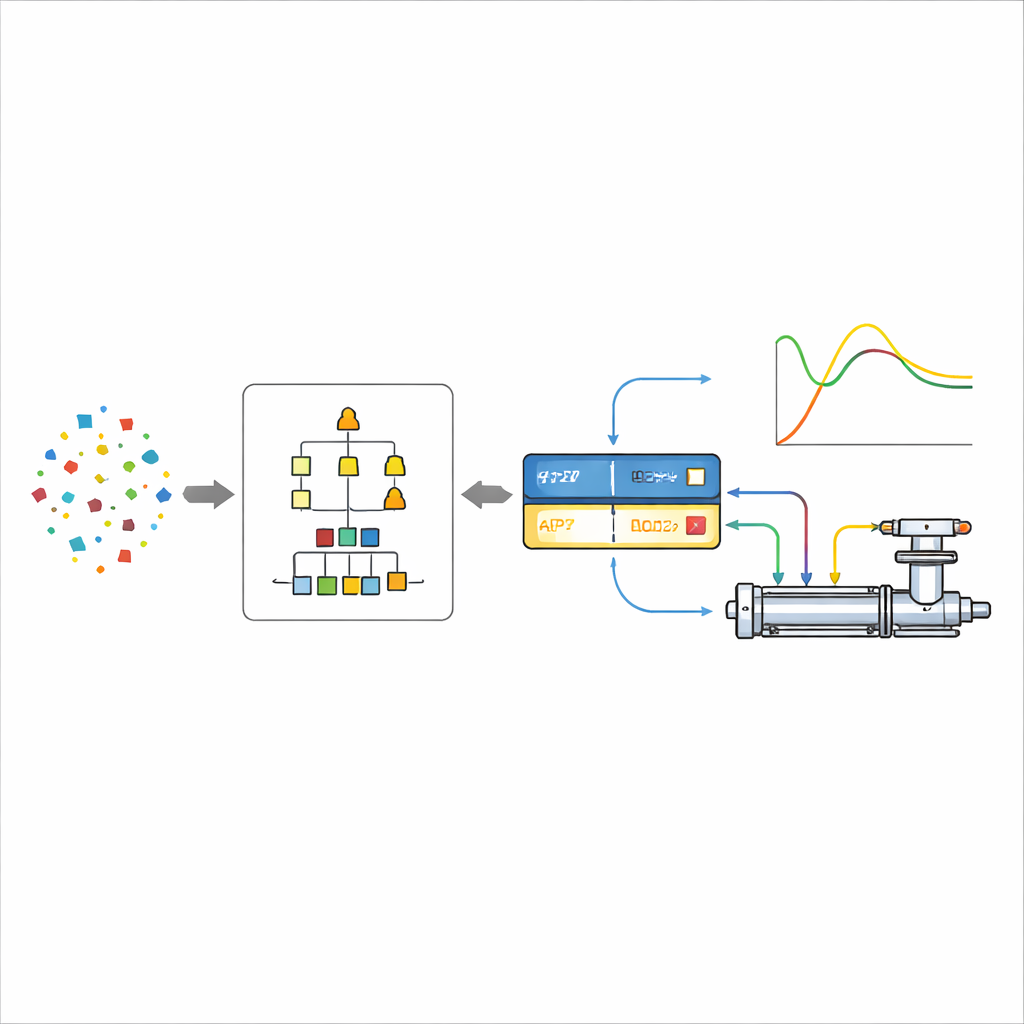
手工设计这样的模糊控制器需要猜测大量参数,从隶属函数的形状到尺度增益不等。取而代之,作者让进化算法自动搜索良好配置。他们提出了一种改进的约束差分进化方法,称为ICBNDE,将每个可能的控制器视为种群中的个体。这些个体以群体方式变异和重组,并通过特殊规则偏好既性能良好又满足工程限制(如整定时间和稳态精度)的解。该算法采用巧妙的“更好且最近”策略引导搜索,并在进展停滞时使用贪婪精炼步骤,避免了许多优化方法所依赖的敏感惩罚因子。
新方法的效果如何
首先,团队在一套国际通用的数学基准约束问题上单独测试了他们的优化方法。ICBNDE持续找到可行的、近似最优的解,并在重复运行中表现出强鲁棒性,经常匹配或优于经典方法。随后他们将方法应用到实际目标:为其液压缸调优模糊PID控制器,并在相同条件下对比调优传统PID。在频率类型的跟踪测试中,即缸体跟随变化的正弦目标时,优化后的模糊控制器产生的位移误差明显小于最佳PID。阶跃测试中,当目标在不同位置间跳变时,模糊控制器通常获得更低的稳态误差,尤其是在较大行程下,而PID有时收敛稍快。最后,将ICBNDE与其他几种先进优化方案比较时,它能提供更一致的控制器设计,具有更好的中位数和平均性能以及较小的运行间差异。
这对未来机器人意味着什么
简而言之,该研究表明,将“模糊”控制器与智能进化调优器结合起来,可以使液压机器人关节比传统方法更精确和鲁棒,而无需控制专家逐一手工设定所有参数。模糊PID自然而然地应对真实缸体混乱且不对称的行为,而ICBNDE算法能可靠地搜索复杂的设计空间并遵循速度和精度的实际限制。尽管仍有提升优化速度和进一步改进算法的空间,这项工作指向了一个未来——高功率类人机器人能够以满足苛刻现实任务的平滑性和可靠性进行运动。
引用: Chen, X., Dong, H., Shen, C. et al. Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm. Sci Rep 16, 10426 (2026). https://doi.org/10.1038/s41598-026-41203-0
关键词: 类人机器人液压系统, 模糊PID控制, 差分进化, 非线性伺服系统, 优化算法