Clear Sky Science · de
Optimierung eines Intervall-Typ-2-Fuzzy-PID-Reglers mit einem verbesserten differenziellen Evolutionsalgorithmus mit Nebenbedingungen
Intelligenterer Muskel für Roboterkörper
Humanoide Roboter, die laufen, springen und schwere Lasten tragen, nutzen oft hydraulische „Muskeln“, weil diese viel mehr Leistung auf kleinem Raum bieten als Elektromotoren. Allerdings ist es berüchtigt schwierig, diese Hydrauliksysteme glatt und präzise zu steuern: Ihr Verhalten ist nichtlinear, empfindlich und schwer vorhersehbar. Diese Arbeit stellt eine neue Methode vor, um einen fortgeschrittenen Regler automatisch zu optimieren, sodass hydraulische Gelenke in einem humanoiden Roboter genauer, stabiler und leichter entwerfbar werden.
Warum hydraulische Gelenke schwer zu regeln sind
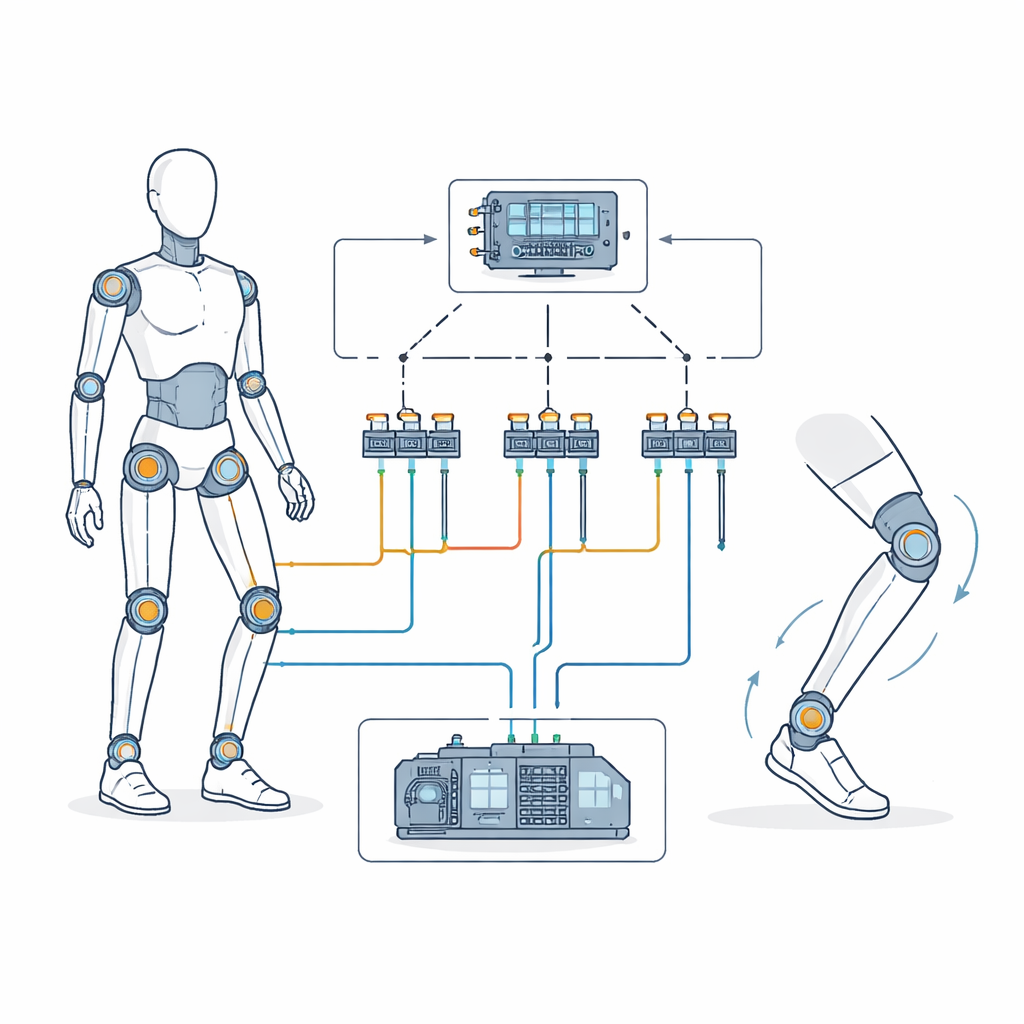
Hydraulische Antriebe können enorme Kräfte über kompakte Zylinder liefern, die von unter Druck stehendem Öl angetrieben werden. Der hier untersuchte humanoide Roboter nutzt eine mobile Hydraulikeinheit mit Pumpen, Ventilen, Akkumulatoren und Kühlern, die mehrere Zylinder in den Beinen versorgen. Während diese Hardware viel Leistung bereitstellt, reagieren die Zylinder beim Aus- und Einfahren unterschiedlich, und ihr Verhalten ändert sich mit Druck, Durchfluss und Last. Einfache Regelungsansätze, wie der vertraute Proportional–Integral–Differential-(PID-)Regler, setzen linearere und besser vorhersehbare Dynamiken voraus, weshalb sie Schwierigkeiten haben, die Zylinderposition ohne Überschwingen oder Schwingungen exakt auf Ziel zu halten. Um das Potenzial dieser leistungsstarken Aktoren auszuschöpfen, argumentieren die Autoren, muss die Regelungslogik Unsicherheit und Nichtlinearität direkt berücksichtigen.
Fuzzy-Logik in den Regler einbauen
Um diese Eigenheiten zu bewältigen, entwickeln die Forscher einen Intervall-Typ-2-Fuzzy-Logik-PID-Regler. Im Kern erlaubt Fuzzy-Logik dem Regler, Regeln zu verwenden, die eher wie menschliches Kopfzerbrechen klingen — etwa „wenn der Positionsfehler klein ist, sich aber schnell ändert, drosseln“ — und Intervall-Typ-2-Fuzzy-Mengen gehen einen Schritt weiter, indem sie Unsicherheit in diesen Regeln explizit modellieren. Das Team entwickelt zunächst ein detailliertes mathematisches Modell des Hydraulikzylinders und seiner Elektronik, einschließlich Sensoren, Servoventilen und Lasten, wie sie in Sprung- und Kniegelenken des Roboters vorkommen. Anschließend betten sie die Fuzzy-Logik um die übliche PID-Struktur ein, mit Eingängen, die den Positionsfehler und seine Änderungsrate beschreiben, und Ausgängen, die den Stellaufwand anpassen. Um das Design praktisch haltbar zu machen, vereinfachen sie die Form der Reglerausgänge, erlauben aber weiterhin reichhaltiges nichtlineares Verhalten durch die Fuzzy-Eingangsregeln.
Den Feinschliff einer evolutionären Methode überlassen
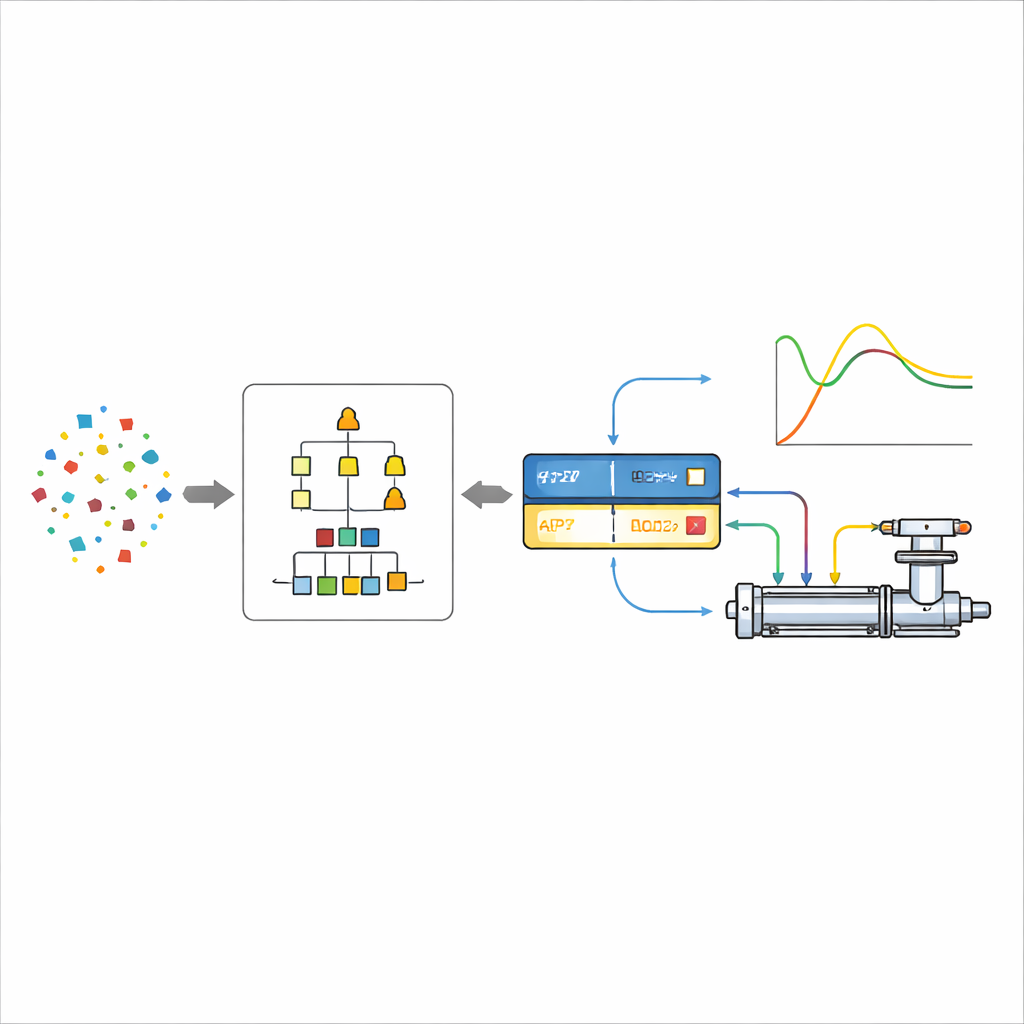
Ein solcher Fuzzy-Regler von Hand zu entwerfen würde das Erraten einer großen Anzahl von Parametern erfordern, von der Form der Mitgliedsfunktionen bis zu Skalierungsfaktoren. Stattdessen lassen die Autoren einen evolutionären Algorithmus automatisch nach guten Einstellungen suchen. Sie führen eine verbesserte, nebenbedingte differenzielle Evolutionsmethode namens ICBNDE ein, die jeden möglichen Regler als Individuum in einer Population behandelt. Gruppen dieser Individuen werden mutiert und rekombiniert, mit speziellen Regeln, die Lösungen bevorzugen, die sowohl gut performen als auch Konstruktionsgrenzen wie Einschwingzeit und stationäre Genauigkeit einhalten. Der Algorithmus verwendet eine clevere „besser und nächster“-Strategie, um die Suche zu lenken, und einen gierigen Verfeinerungsschritt, wenn der Fortschritt stockt, wodurch die empfindlichen Strafkonstanten vermieden werden, die viele Optimierungsmethoden benötigen.
Wie gut der neue Ansatz funktioniert
Zuerst testet das Team seine Optimierungsmethode allein an einer standardisierten Suite mathematischer Benchmark-Probleme, die weltweit zur Bewertung nebenbedingter Algorithmen verwendet wird. ICBNDE findet konsistent zulässige, nahezu optimale Lösungen und zeigt starke Zuverlässigkeit über wiederholte Läufe, oft vergleichbar oder besser als klassische Methoden. Dann wenden sie das Verfahren auf das eigentliche Ziel an: das Abstimmen des Fuzzy-PID-Reglers für ihren Hydraulikzylinder und, zum Vergleich, das Abstimmen eines konventionellen PID unter denselben Bedingungen. In frequenzähnlichen Tracking-Tests, bei denen der Zylinder wechselnden sinusförmigen Zielen folgt, erzeugt der optimierte Fuzzy-Regler deutlich kleinere Positionsfehler als der beste PID. Sprungantworttests, bei denen das Ziel zwischen verschiedenen Positionen wechselt, zeigen, dass der Fuzzy-Regler im Allgemeinen geringere stationäre Fehler erreicht, insbesondere bei größeren Auslenkungen, während der PID manchmal etwas schneller einschwingt. Schließlich liefert ICBNDE, verglichen mit mehreren anderen fortgeschrittenen Optimierungsschemata, konsistentere Reglerentwürfe mit besseren Median- und Durchschnittsleistungen und weniger Streuung zwischen den Läufen.
Was das für künftige Roboter bedeutet
Kurz gesagt zeigt die Studie, dass die Kombination eines „fuzzy“ Reglers mit einem intelligenten evolutionären Tuner hydraulische Robotergelenke präziser und robuster machen kann als traditionelle Methoden, ohne dass ein Regelungsexperte jeden Parameter von Hand ausfeilen muss. Der Fuzzy-PID geht natürlich mit dem unordentlichen, asymmetrischen Verhalten realer Zylinder um, während der ICBNDE-Algorithmus zuverlässig den komplexen Entwurfsraum durchsucht und praktische Grenzen für Geschwindigkeit und Genauigkeit respektiert. Zwar bleibt Raum, die Optimierung zu beschleunigen und den Algorithmus weiter zu verfeinern, doch diese Arbeit weist in Richtung einer Zukunft, in der kraftvolle humanoide Roboter sich mit der Geschmeidigkeit und Zuverlässigkeit bewegen können, die für anspruchsvolle reale Aufgaben nötig ist.
Zitation: Chen, X., Dong, H., Shen, C. et al. Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm. Sci Rep 16, 10426 (2026). https://doi.org/10.1038/s41598-026-41203-0
Schlüsselwörter: Hydraulik für humanoide Roboter, fuzzy PID-Regelung, differenzielle Evolution, nichtlineare Servosysteme, Optimierungsalgorithmen