Clear Sky Science · en
Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm
Smarter Muscle for Robot Bodies
Humanoid robots that walk, jump, and carry heavy loads often rely on hydraulic "muscles" because they can pack far more power into a small space than electric motors. But getting these hydraulic systems to move smoothly and precisely is notoriously tricky: their behavior is nonlinear, sensitive, and hard to predict. This paper introduces a new way to automatically tune an advanced controller so that hydraulic joints in a humanoid robot become more accurate, more stable, and easier to design.
Why Hydraulic Joints Are Hard to Control
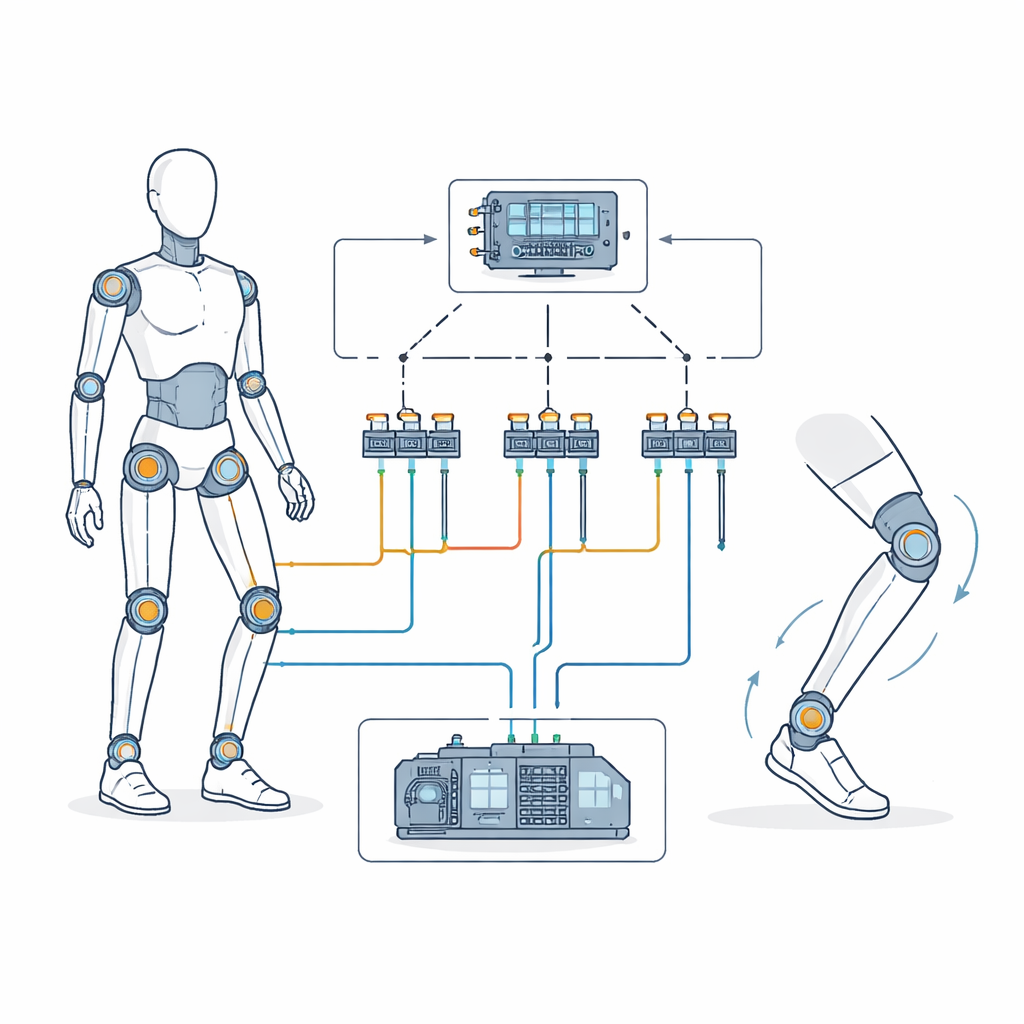
Hydraulic actuators can deliver huge forces through compact cylinders driven by pressurized oil. The humanoid robot studied here uses a mobile hydraulic power unit with pumps, valves, accumulators, and coolers to feed several cylinders in the legs. While this hardware delivers plenty of power, the cylinders themselves respond differently when extending and retracting, and their behavior changes with pressure, flow, and load. Simple control schemes, like the familiar proportional–integral–derivative (PID) controller, assume more linear and predictable dynamics, so they struggle to keep the cylinder’s position tightly on target without overshoot or oscillation. To get the most out of these powerful actuators, the authors argue, the control logic must be able to handle uncertainty and nonlinearity directly.
Adding Fuzzy Thinking to the Controller
To tackle these quirks, the researchers build an interval type‑2 fuzzy logic PID controller. In essence, fuzzy logic allows the controller to use rules that sound more like human reasoning—such as "if the position error is small but changing quickly, ease off"—and interval type‑2 fuzzy sets go a step further by explicitly modeling uncertainty in those rules. The team first develops a detailed mathematical model of the hydraulic cylinder and its electronics, including sensors, servo valves, and loads used in the robot’s ankle and knee joints. They then embed the fuzzy logic around the usual PID structure, with inputs describing the position error and how fast it is changing, and outputs that adjust the control effort. To keep the design practical, they simplify the controller’s output shapes while still allowing rich nonlinear behavior through the fuzzy input rules.
Letting an Evolutionary Algorithm Do the Tuning
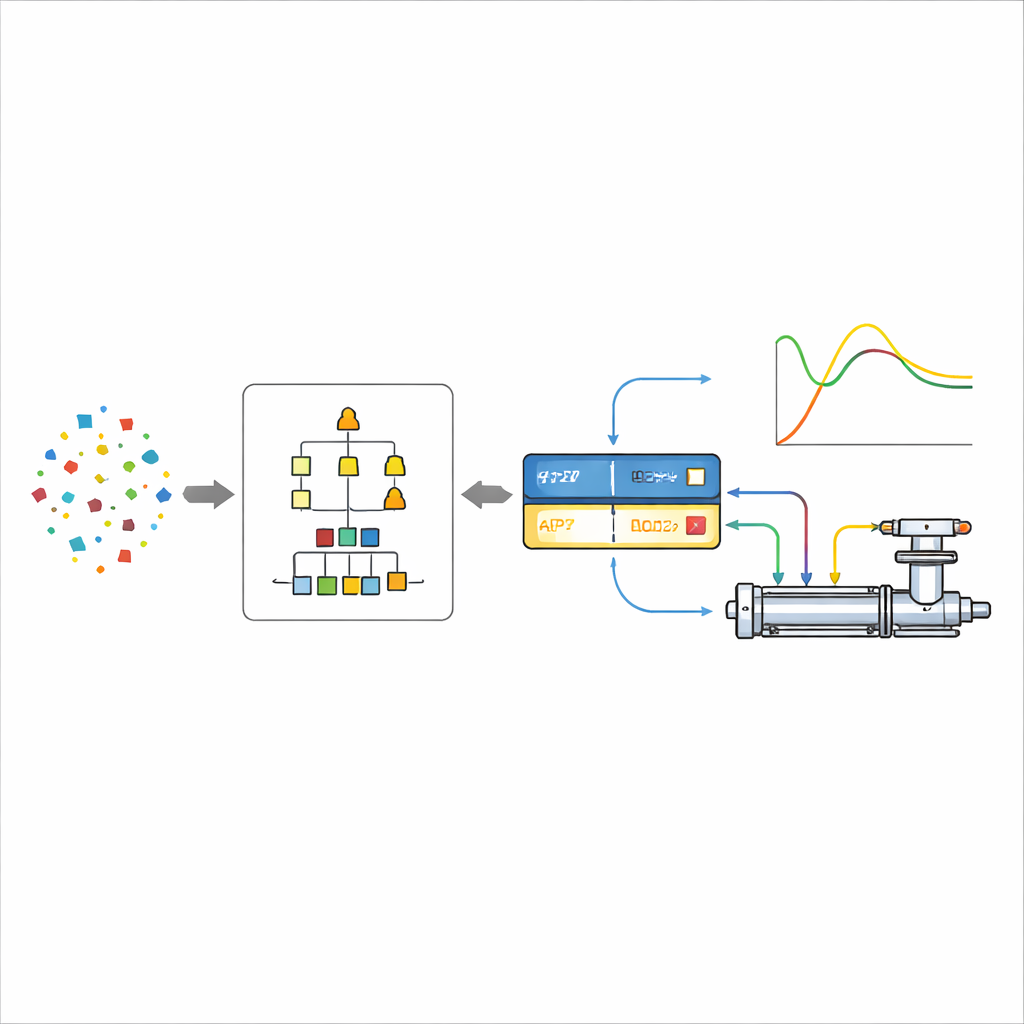
Designing such a fuzzy controller by hand would require guessing a large number of parameters, from the shapes of membership functions to scaling gains. Instead, the authors let an evolutionary algorithm search for good settings automatically. They introduce an improved constrained differential evolution method called ICBNDE, which treats each possible controller as an individual in a population. Groups of these individuals are mutated and recombined, with special rules that favor solutions that both perform well and obey engineering limits such as settling time and steady‑state accuracy. The algorithm uses a clever "better and nearest" strategy to guide the search and a greedy refinement step when progress stalls, avoiding the delicate penalty factors that many optimization methods require.
How Well the New Approach Works
First, the team tests their optimization method alone on a standard suite of mathematical benchmark problems used worldwide to judge constrained algorithms. ICBNDE consistently finds feasible, near‑optimal answers and shows strong reliability across repeated runs, often matching or beating classic methods. Then they apply it to the real target: tuning the fuzzy PID controller for their hydraulic cylinder, and, for comparison, tuning a conventional PID under the same conditions. In frequency‑style tracking tests, where the cylinder follows changing sinusoidal targets, the optimized fuzzy controller produces significantly smaller position errors than the best PID. Step tests, where the target jumps between different positions, show that the fuzzy controller generally achieves lower steady‑state error, especially for larger strokes, while the PID sometimes settles slightly faster. Finally, when pitted against several other advanced optimization schemes, ICBNDE delivers more consistent controller designs, with better median and average performance and less variation between runs.
What This Means for Future Robots
In plain terms, the study shows that combining a "fuzzy" controller with a smart evolutionary tuner can make hydraulic robot joints more precise and robust than traditional methods, without requiring a control expert to hand‑craft every parameter. The fuzzy PID deals naturally with the messy, asymmetric behavior of real cylinders, while the ICBNDE algorithm reliably searches the complex design space and respects practical limits on speed and accuracy. Although there is still room to speed up the optimization and refine the algorithm further, this work points toward a future where high‑power humanoid robots can move with the smoothness and reliability needed for demanding real‑world tasks.
Citation: Chen, X., Dong, H., Shen, C. et al. Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm. Sci Rep 16, 10426 (2026). https://doi.org/10.1038/s41598-026-41203-0
Keywords: humanoid robot hydraulics, fuzzy PID control, differential evolution, nonlinear servo systems, optimization algorithms