Clear Sky Science · fr
Optimisation d’un régulateur PID à logique floue de type intervalle 2 par un algorithme d’évolution différentielle contraint amélioré
Des muscles plus intelligents pour les corps robotiques
Les robots humanoïdes qui marchent, sautent et transportent de lourdes charges s’appuient souvent sur des « muscles » hydrauliques, car ceux‑ci peuvent fournir beaucoup plus de puissance dans un espace réduit que les moteurs électriques. Mais obtenir des mouvements fluides et précis avec ces systèmes hydrauliques est notoirement difficile : leur comportement est non linéaire, sensible et difficile à prévoir. Cet article présente une nouvelle méthode pour régler automatiquement un contrôleur avancé afin que les articulations hydrauliques d’un robot humanoïde deviennent plus précises, plus stables et plus faciles à concevoir.
Pourquoi les articulations hydrauliques sont difficiles à contrôler
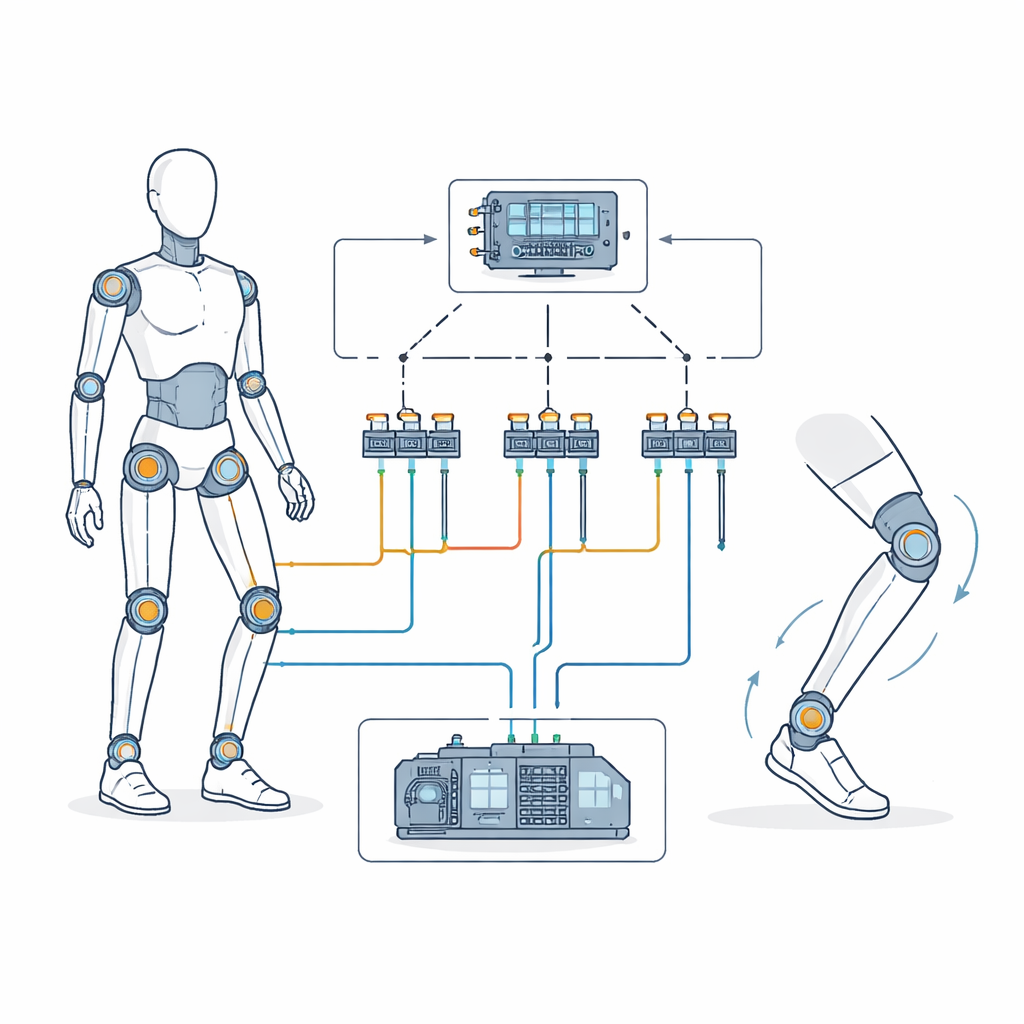
Les actionneurs hydrauliques peuvent délivrer des forces énormes via des vérins compacts entraînés par de l’huile sous pression. Le robot humanoïde étudié ici utilise une unité mobile d’alimentation hydraulique avec pompes, vannes, accumulateurs et refroidisseurs pour alimenter plusieurs vérins des jambes. Si ce matériel fournit beaucoup de puissance, les vérins eux‑mêmes réagissent différemment en extension et en rétraction, et leur comportement évolue selon la pression, le débit et la charge. Les schémas de commande simples, comme le familier correcteur proportionnel–intégral–dérivé (PID), supposent des dynamiques plus linéaires et prévisibles ; ils peinent donc à maintenir la position du vérin sans dépassement ou oscillation. Pour exploiter au mieux ces actionneurs puissants, les auteurs soutiennent que la logique de commande doit pouvoir gérer directement l’incertitude et la non‑linéarité.
Ajouter une logique floue au contrôleur
Pour s’attaquer à ces particularités, les chercheurs construisent un régulateur PID à logique floue de type intervalle 2. En substance, la logique floue permet au contrôleur d’utiliser des règles qui ressemblent davantage au raisonnement humain—par exemple « si l’erreur de position est petite mais change rapidement, relâcher »—et les ensembles flous de type intervalle 2 vont plus loin en modélisant explicitement l’incertitude de ces règles. L’équipe développe d’abord un modèle mathématique détaillé du vérin hydraulique et de son électronique, incluant capteurs, servovannes et charges utilisés aux niveaux de la cheville et du genou du robot. Ils intègrent ensuite la logique floue autour de la structure PID habituelle, avec des entrées décrivant l’erreur de position et sa dérivée, et des sorties ajustant l’effort de commande. Pour garder la conception pratique, ils simplifient les formes de sortie du contrôleur tout en conservant un comportement non linéaire riche via les règles floues d’entrée.
Laisser un algorithme évolutionnaire réaliser le réglage
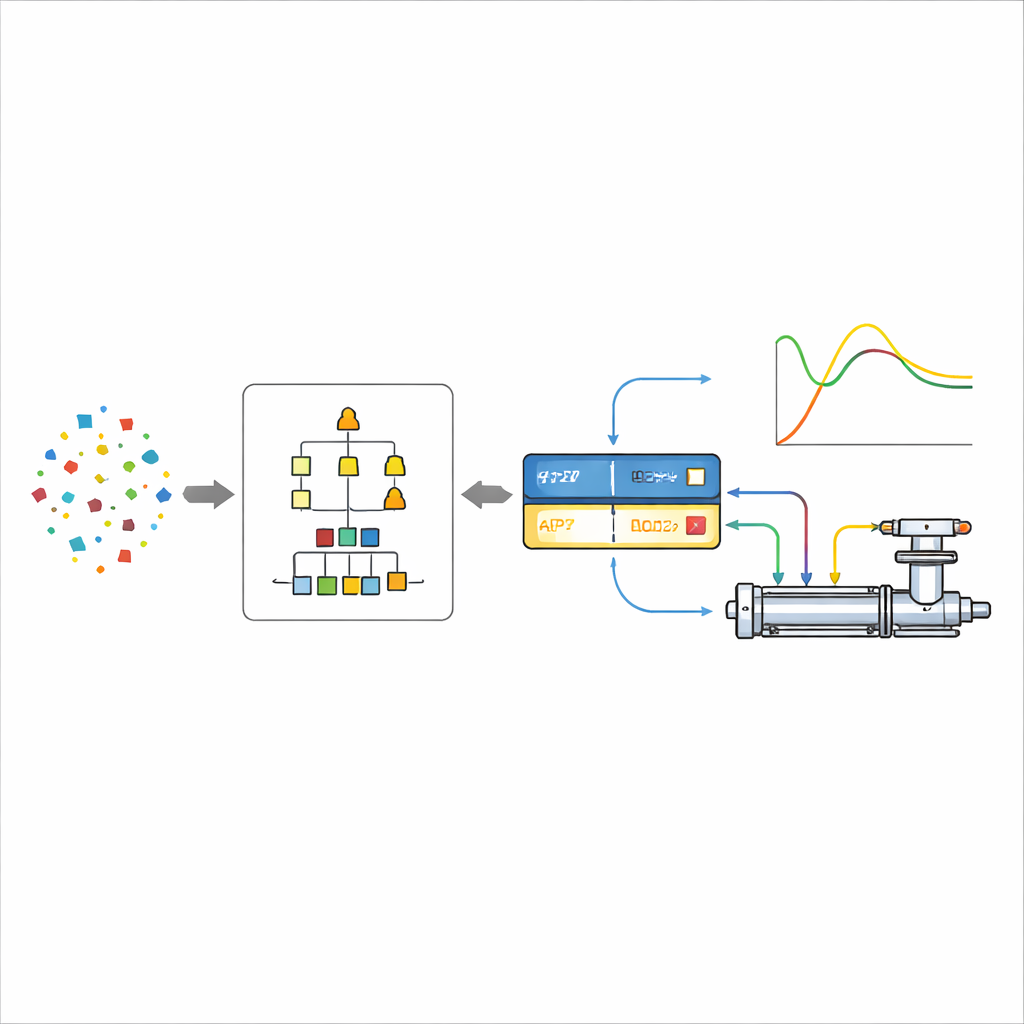
Concevoir un tel contrôleur flou manuellement exigerait d’estimer un grand nombre de paramètres, des formes des fonctions d’appartenance aux gains d’échelle. À la place, les auteurs laissent un algorithme évolutionnaire chercher automatiquement de bons réglages. Ils présentent une méthode d’évolution différentielle contrainte améliorée appelée ICBNDE, qui traite chaque contrôleur possible comme un individu d’une population. Des groupes de ces individus sont mutés et recombinés, avec des règles particulières favorisant les solutions qui performent bien tout en respectant des limites d’ingénierie telles que le temps de stabilisation et la précision en régime permanent. L’algorithme utilise une stratégie astucieuse « meilleur et le plus proche » pour guider la recherche et une étape de raffinement gourmande lorsque le progrès stagne, évitant les facteurs de pénalité délicats requis par de nombreuses méthodes d’optimisation.
Quelle est l’efficacité de la nouvelle approche
Dans un premier temps, l’équipe teste sa méthode d’optimisation seule sur une suite standard de problèmes de référence mathématiques utilisée mondialement pour évaluer les algorithmes contraints. ICBNDE trouve de manière constante des solutions réalisables et quasi‑optimales et montre une forte fiabilité sur des exécutions répétées, égalant ou surpassant souvent des méthodes classiques. Ils l’appliquent ensuite à la cible réelle : le réglage du contrôleur PID flou pour leur vérin hydraulique, et, pour comparaison, au réglage d’un PID conventionnel dans les mêmes conditions. Dans des essais de suivi de style fréquentiel, où le vérin suit des cibles sinusoïdales variables, le contrôleur flou optimisé génère des erreurs de position significativement plus faibles que le meilleur PID. Les essais en échelon, où la consigne saute entre différentes positions, montrent que le contrôleur flou atteint généralement une erreur en régime permanent plus faible, en particulier pour des débattements importants, tandis que le PID se stabilise parfois un peu plus rapidement. Enfin, lorsqu’on le compare à plusieurs autres schémas d’optimisation avancés, ICBNDE produit des conceptions de contrôleur plus cohérentes, avec de meilleures performances médianes et moyennes et moins de variation entre les exécutions.
Ce que cela signifie pour les robots du futur
En termes clairs, l’étude montre que combiner un contrôleur « flou » avec un réglage évolutionnaire intelligent peut rendre les articulations hydrauliques des robots plus précises et robustes que les méthodes traditionnelles, sans exiger qu’un expert en commande définisse chaque paramètre à la main. Le PID flou gère naturellement le comportement complexe et asymétrique des vérins réels, tandis que l’algorithme ICBNDE explore de manière fiable l’espace de conception complexe en respectant les limites pratiques de vitesse et de précision. Bien qu’il reste des marges d’accélération de l’optimisation et d’affinement de l’algorithme, ce travail ouvre la voie vers un avenir où des robots humanoïdes à haute puissance pourront bouger avec la fluidité et la fiabilité nécessaires pour des tâches exigeantes en conditions réelles.
Citation: Chen, X., Dong, H., Shen, C. et al. Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm. Sci Rep 16, 10426 (2026). https://doi.org/10.1038/s41598-026-41203-0
Mots-clés: hydraulique pour robots humanoïdes, commande PID floue, évolution différentielle, systèmes asservis non linéaires, algorithmes d’optimisation