Clear Sky Science · ru
Оптимизация ПИД‑регулятора на основе интервально‑типового нечеткого логического управления с помощью улучшенного дифференциального эволюционного алгоритма с ограничениями
Более «умный» мускул для тел роботов
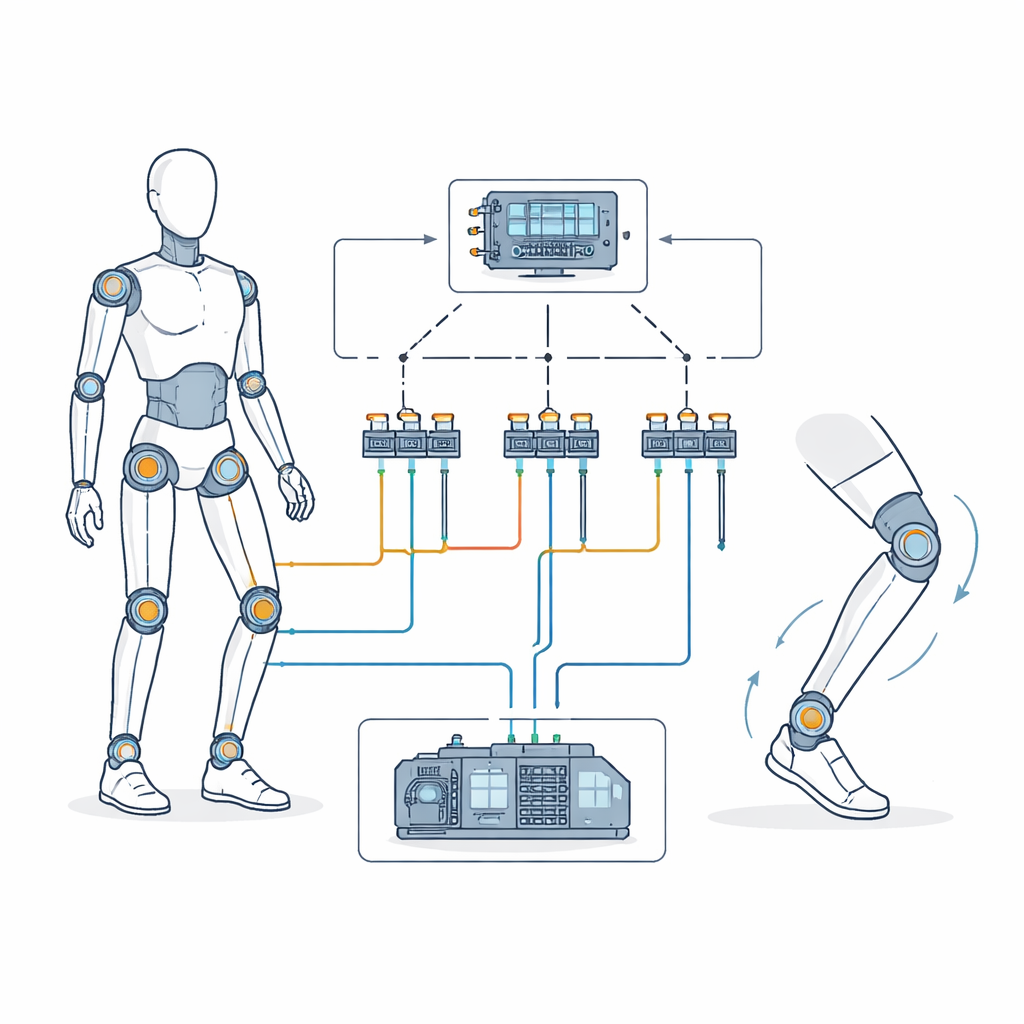
Гуманоиды, которые ходят, прыгают и переносят тяжести, часто используют гидравлические «мускулы», поскольку они обеспечивают значительно большую удельную мощность по сравнению с электродвигателями. Но управлять такими гидравлическими системами плавно и точно непросто: их поведение нелинейно, чувствительно к условиям и трудно предсказуемо. В статье представлен новый способ автоматической настройки продвинутого регулятора, чтобы гидравлические суставы гуманоидного робота стали точнее, устойчивее и проще в проектировании.
Почему гидравлические суставы тяжело контролировать
Гидравлические исполнительные механизмы способны развивать огромные силы в компактных цилиндрах, приводимых в действие под давлением масла. Исследуемый гуманоид использует мобильную гидравлическую силовую установку с насосами, клапанами, аккумуляторами и охладителями для питания нескольких цилиндров в ногах. Хотя это оборудование даёт много мощности, сами цилиндры ведут себя по‑разному при выдвижении и втягивании, а их характеристики меняются в зависимости от давления, расхода и нагрузки. Простые схемы управления, такие как привычный пропорционально‑интегрально‑дифференциальный (ПИД) регулятор, предполагают более линейную и предсказуемую динамику, поэтому им трудно удерживать позицию цилиндра точно на задании без превышений или колебаний. Авторы утверждают, что для полного раскрытия потенциала этих мощных приводов логика управления должна непосредственно учитывать неопределённость и нелинейность.
Добавляя нечеткое мышление в регулятор
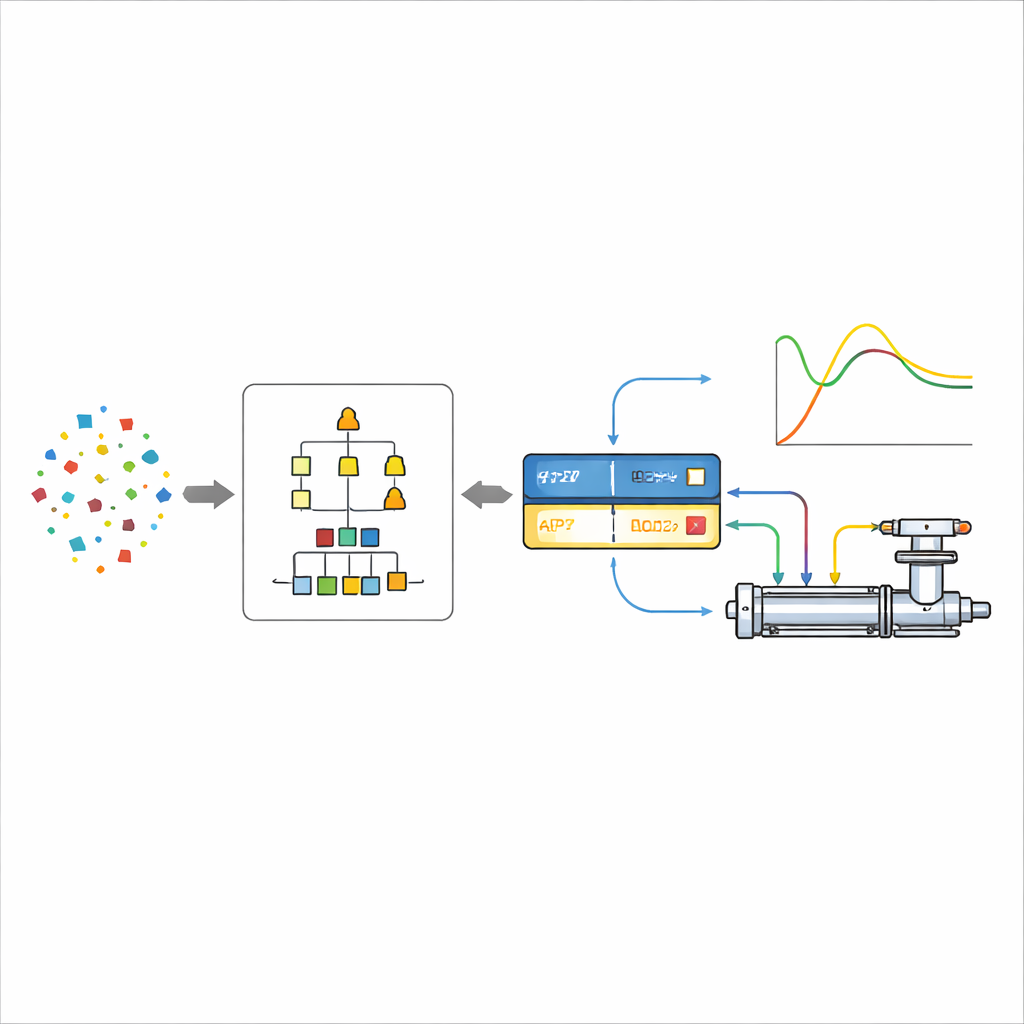
Чтобы справиться с этими особенностями, исследователи создают ПИД‑регулятор с интервально‑типовой нечеткой логикой. По сути, нечеткая логика позволяет регулятору использовать правила, похожие на человеческие рассуждения — например: «если ошибка положения мала, но быстро меняется, ослабьте усилие» — а интервально‑типовые нечеткие множества идут дальше, явно моделируя неопределённость в этих правилах. Команда сначала развивает детальную математическую модель гидравлического цилиндра и его электроники, включая датчики, сервоклапаны и нагрузки, используемые в голеностопном и коленном суставах робота. Затем нечеткая логика внедряется поверх привычной ПИД‑структуры, с входами, описывающими ошибку положения и скорость её изменения, и выходами, корректирующими управляющее усилие. Чтобы сделать конструкцию практичной, они упрощают формы выходных функций, при этом сохраняя богатое нелинейное поведение через нечеткие входные правила.
Доверить настройку эволюционному алгоритму
Ручная разработка такого нечеткого регулятора потребовала бы подбора большого числа параметров — от форм функций принадлежности до масштабных коэффициентов. Вместо этого авторы позволяют эволюционному алгоритму автоматически искать хорошие настройки. Они предлагают улучшенный метод дифференциальной эволюции с ограничениями, названный ICBNDE, который рассматривает каждый возможный регулятор как особь в популяции. Группы таких особей подвергаются мутациям и рекомбинации с особыми правилами, которые отдают предпочтение решениям, одновременно хорошо работающим и удовлетворяющим инженерным ограничениям, таким как время установления и точность в установившемся режиме. Алгоритм использует хитрую стратегию «лучший и ближайший» для направления поиска и жадный шаг уточнения при застое прогресса, избегая аккуратного подбора штрафных коэффициентов, которые требуются многим методам оптимизации.
Насколько хорошо работает новый подход
Сначала команда проверяет свой метод оптимизации отдельно на стандартном наборе математических эталонных задач, используемых во всём мире для оценки алгоритмов с ограничениями. ICBNDE стабильно находит допустимые, близкие к оптимальным ответы и показывает высокую надёжность при повторных прогонов, часто сопоставимую или превосходящую классические методы. Затем его применяют к реальной задаче: настройке нечеткого ПИД‑регулятора для их гидравлического цилиндра и, для сравнения, к настройке обычного ПИД в тех же условиях. В тестах отслеживания по частоте, где цилиндр следует за меняющимися синусоидальными заданиями, оптимизированный нечеткий регулятор даёт существенно меньшие ошибки положения, чем лучший ПИД. В ступенчатых тестах, где задание скачком переходит между позициями, нечеткий регулятор обычно обеспечивает меньшую установившуюся ошибку, особенно при больших ходах, тогда как ПИД иногда достигает немного более быстрого установления. Наконец, при сравнении с несколькими другими современными схемами оптимизации ICBNDE дает более последовательные конструкции регуляторов, с лучшими медианой и средним показателями и меньшей разбросом результатов между прогонками.
Что это значит для будущих роботов
Проще говоря, исследование показывает, что сочетание «нечеткого» регулятора с умным эволюционным настроителем может сделать гидравлические суставы робота более точными и надёжными по сравнению с традиционными методами, при этом не требуя от специалиста вручную задавать каждый параметр. Нечеткий ПИД естественно работает с неаккуратным, асимметричным поведением реальных цилиндров, а алгоритм ICBNDE надёжно исследует сложное пространство проектных параметров и соблюдает практические ограничения по скорости и точности. Хотя остаётся пространство для ускорения оптимизации и дальнейшей доработки алгоритма, эта работа указывает на будущее, в котором мощные гуманоиды смогут двигаться с той плавностью и надёжностью, которые требуются для сложных задач в реальном мире.
Цитирование: Chen, X., Dong, H., Shen, C. et al. Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm. Sci Rep 16, 10426 (2026). https://doi.org/10.1038/s41598-026-41203-0
Ключевые слова: гидравлика гуманоидных роботов, нечеткое ПИД‑управление, дифференциальная эволюция, нелинейные сервосистемы, алгоритмы оптимизации