Clear Sky Science · sv
Optimera intervaltyp‑2 fuzzy‑logik PID‑regulator med en förbättrad begränsad differentialevolutionsalgoritm
Smartare muskler för robotkroppar
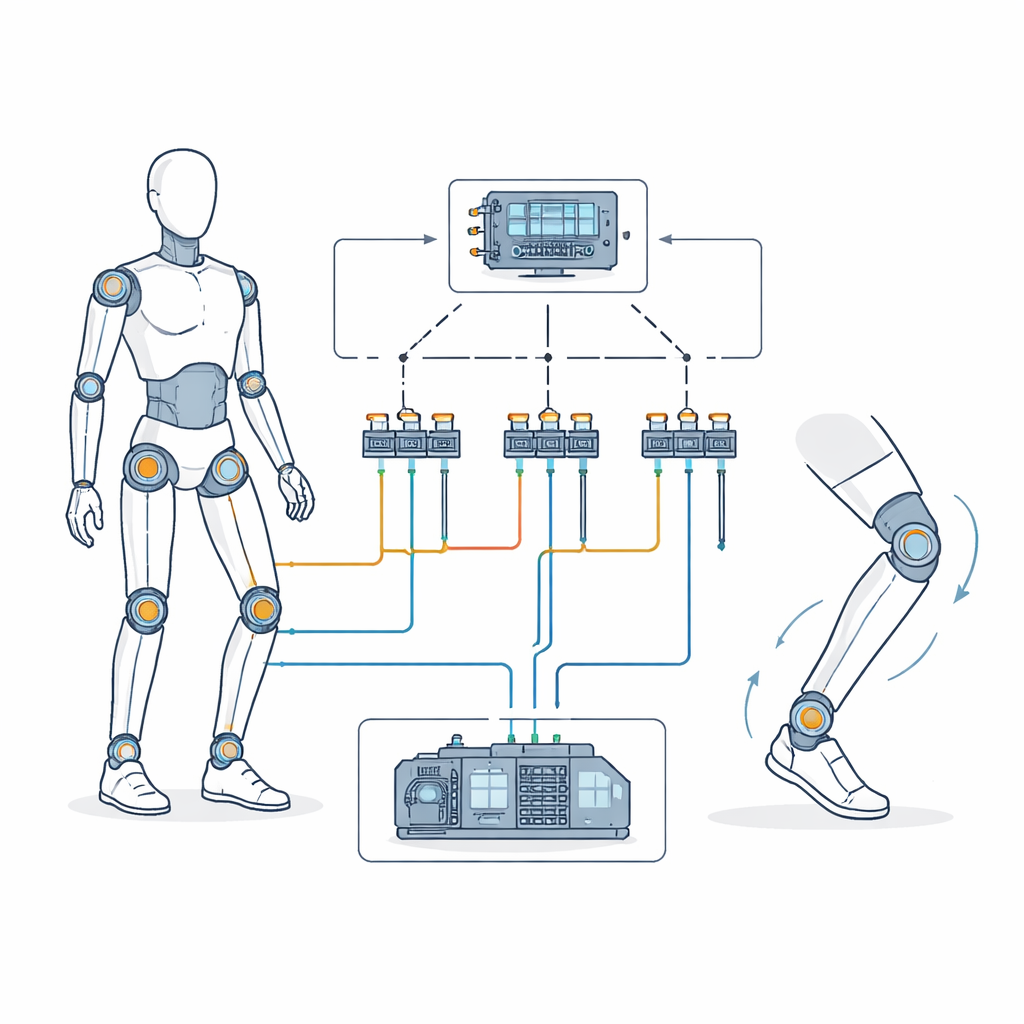
Humanoida robotar som går, hoppar och bär tunga laster förlitar sig ofta på hydrauliska ”muskler” eftersom de kan leverera mycket mer kraft på liten yta än elmotorer. Men att få dessa hydrauliska system att röra sig mjukt och precist är beryktat svårt: deras beteende är icke‑linjärt, känsligt och svårt att förutsäga. Denna artikel introducerar ett nytt sätt att automatiskt ställa in en avancerad regulator så att hydrauliska leder i en humanoid robot blir noggrannare, mer stabila och enklare att konstruera.
Varför hydrauliska leder är svåra att styra
Hydrauliska ställdon kan leverera enorma krafter genom kompakta cylindrar drivna av trycksatt olja. Den humanoida roboten som studeras här använder en mobil hydraulisk kraftenhet med pumpar, ventiler, ackumulatorer och kylare för att mata flera cylindrar i benen. Medan denna hårdvara ger gott om kraft reagerar cylindrarna olika vid utsträckning och återdragning, och deras beteende förändras med tryck, flöde och last. Enkla styrscheman, som den välkända proportional–integral–derivative (PID)‑regulatorn, antar mer linjära och förutsägbara dynamiker, så de har svårt att hålla cylinderns position exakt utan överskjutning eller oscillation. För att utnyttja dessa kraftfulla ställdon fullt ut menar författarna att styrlogiken måste kunna hantera osäkerhet och icke‑linearitet direkt.
Lägga till fuzzy‑tänkande i regulatorn
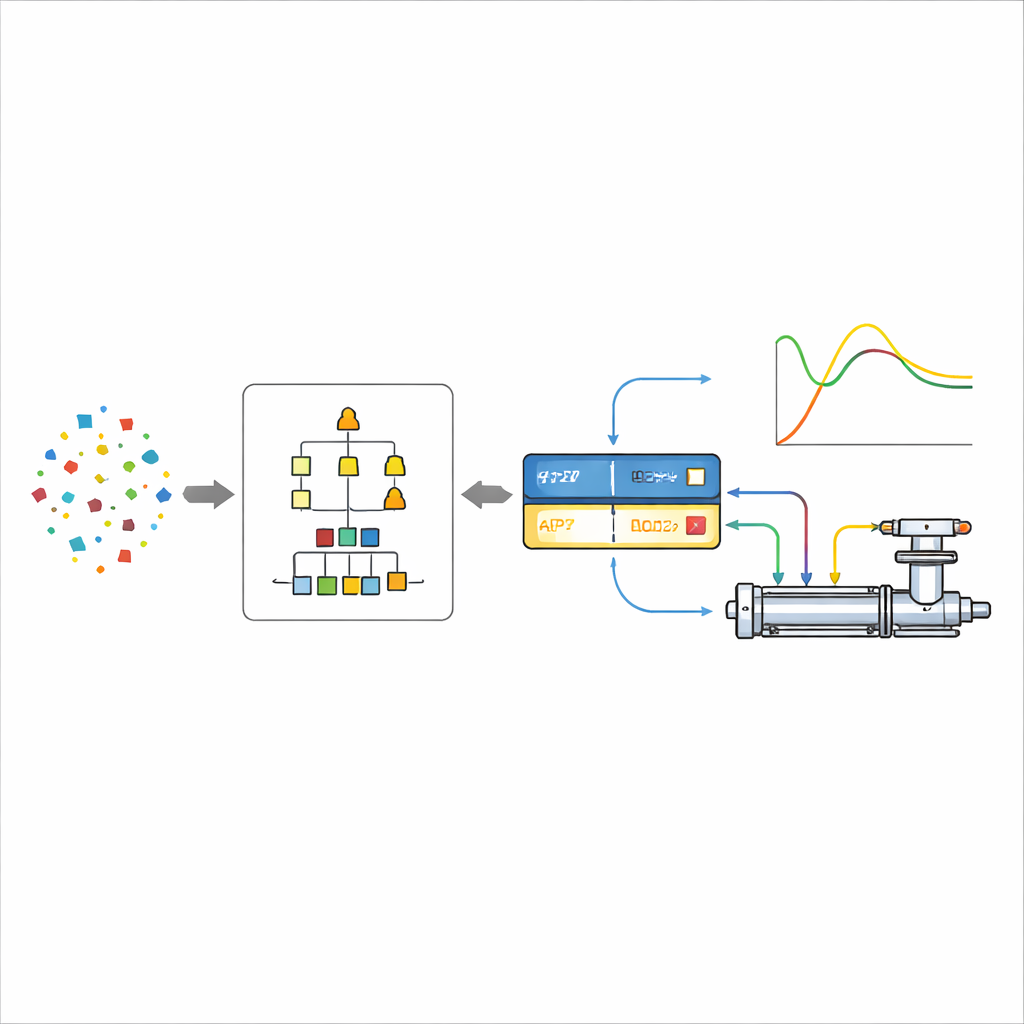
För att hantera dessa egenheter bygger forskarna en intervaltyp‑2 fuzzy‑logik PID‑regulator. I grunden tillåter fuzzy‑logik att regulatorn använder regler som mer liknar mänskligt resonemang — till exempel ”om positionsfelet är litet men ändras snabbt, minska insatsen” — och intervaltyp‑2 fuzzy‑mängder går ett steg längre genom att uttryckligen modellera osäkerhet i dessa regler. Teamet utvecklar först en detaljerad matematisk modell av den hydrauliska cylindern och dess elektronik, inklusive sensorer, servoventiler och laster som används i robotens fotleds‑ och knäleder. De bygger sedan in fuzzy‑logiken runt den vanliga PID‑strukturen, med insignaler som beskriver positionsfelet och hur snabbt det förändras, och utsignaler som justerar styrinsatsen. För att hålla designen praktisk förenklar de regulatorns utsignalformer samtidigt som de tillåter rikt icke‑linjärt beteende genom de fuzzy insignalerna.
Låta en evolutionär algoritm göra fininställningen
Att designa en sådan fuzzy‑regulator för hand skulle kräva att man gissar ett stort antal parametrar, från formerna på medlemskapsfunktionerna till skalningsvinster. Istället låter författarna en evolutionär algoritm söka efter bra inställningar automatiskt. De introducerar en förbättrad begränsad differentialevolutionmetod kallad ICBNDE, som behandlar varje möjlig regulator som en individ i en population. Grupper av dessa individer muteras och kombineras, med särskilda regler som gynnar lösningar som både presterar väl och följer tekniska gränser såsom insättnings‑/dämpningstid och steady‑state‑noggrannhet. Algoritmen använder en smart ”bättre och närmast”‑strategi för att styra sökningen och ett girigt förfiningssteg när framsteg avstannar, vilket undviker de känsliga strafffaktorer som många optimeringsmetoder kräver.
Hur väl den nya metoden fungerar
Först testar teamet sin optimeringsmetod separat på en standarduppsättning matematiska benchmarkproblem som används globalt för att bedöma begränsade algoritmer. ICBNDE hittar konsekvent genomförbara, nästintill optimala svar och visar stark tillförlitlighet över upprepade körningar, ofta matchande eller överträffande klassiska metoder. Därefter applicerar de den på det verkliga målet: att ställa in den fuzzy PID‑regulatorn för deras hydraulcylinder, och, för jämförelse, att ställa in en konventionell PID under samma förhållanden. I frekvensliknande spårningstester, där cylindern följer föränderliga sinusformade mål, ger den optimerade fuzzy‑regulatorn avsevärt mindre positionsfel än den bästa PID:n. Stegtester, där målet hoppar mellan olika positioner, visar att fuzzy‑regulatorn generellt uppnår lägre steady‑state‑fel, särskilt för större slaglängder, medan PID ibland stabiliserar något snabbare. Slutligen, när den ställs mot flera andra avancerade optimeringsscheman, levererar ICBNDE mer konsekventa regulatorinställningar, med bättre median‑ och genomsnittsprestanda samt mindre variation mellan körningar.
Vad detta betyder för framtidens robotar
Enkelt uttryckt visar studien att kombinationen av en ”fuzzy” regulator och en smart evolutionär finjusterare kan göra hydrauliska robotleder mer precisa och robusta än traditionella metoder, utan att kräva att en styrningsexpert handdesigner varje parameter. Den fuzzy PID:n hanterar naturligt det röriga, asymmetriska beteendet hos verkliga cylindrar, medan ICBNDE‑algoritmen på ett tillförlitligt sätt söker igenom det komplexa designrummet och respekterar praktiska gränser för hastighet och noggrannhet. Även om det fortfarande finns utrymme att snabba upp optimeringen och förfina algoritmen pekar detta arbete mot en framtid där högpresterande humanoida robotar kan röra sig med den mjukhet och pålitlighet som krävs för krävande uppgifter i verkliga miljöer.
Citering: Chen, X., Dong, H., Shen, C. et al. Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm. Sci Rep 16, 10426 (2026). https://doi.org/10.1038/s41598-026-41203-0
Nyckelord: hydraulik för humanoida robotar, fuzzy PID‑styrning, differentialevolution, icke‑linjära servosystem, optimeringsalgoritmer