Clear Sky Science · pl
Optymalizacja regulatora PID typu nieostrego przedziałowego (interval type-2) za pomocą udoskonalonego algorytmu różnicowej ewolucji ze sprzężeniami
Sprytniejszy „mięsień” dla robotycznych ciał
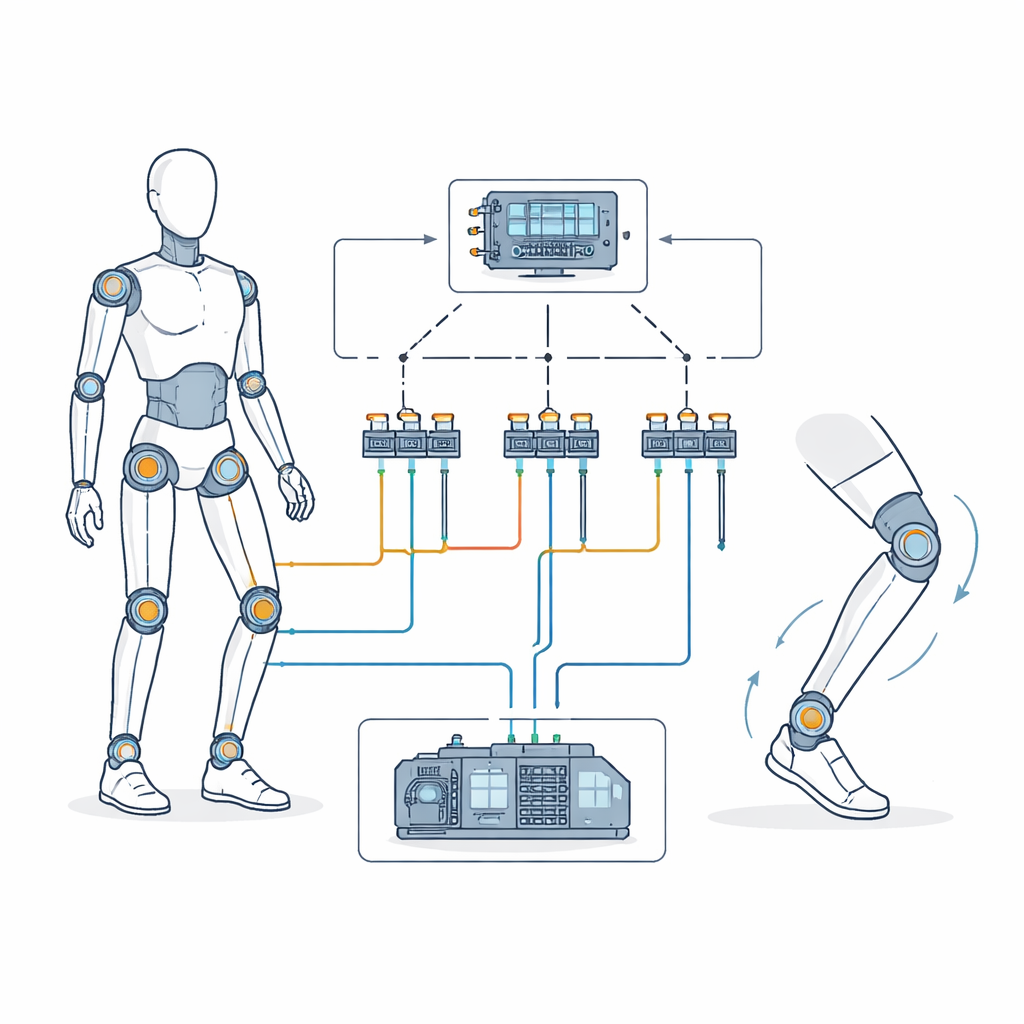
Roboty humanoidalne, które chodzą, skaczą i przenoszą ciężkie ładunki, często korzystają z hydraulicznych „mięśni”, ponieważ mogą skondensować znacznie więcej mocy w niewielkiej przestrzeni niż silniki elektryczne. Jednak uzyskanie płynnego i precyzyjnego ruchu tych układów hydraulicznych jest znane jako trudne: ich zachowanie jest nieliniowe, wrażliwe i trudne do przewidzenia. W niniejszym artykule przedstawiono nową metodę automatycznego strojenia zaawansowanego regulatora, dzięki której przeguby hydrauliczne w robocie humanoidalnym stają się bardziej dokładne, stabilne i łatwiejsze w projektowaniu.
Dlaczego przeguby hydrauliczne trudno kontrolować
Siłowniki hydrauliczne mogą generować ogromne siły przez zwarte cylindry napędzane sprężonym olejem. Badany humanoid wykorzystuje mobilną jednostkę zasilania hydraulicznego z pompami, zaworami, akumulatorami i chłodnicami, która zasila kilka cylindrów w nogach. Choć to wyposażenie dostarcza dużo mocy, same siłowniki zachowują się inaczej przy wysuwaniu i chowaniu tłoka, a ich charakterystyka zmienia się wraz z ciśnieniem, przepływem i obciążeniem. Proste schematy sterowania, takie jak dobrze znany regulator proporcjonalno‑całkująco‑różniczkujący (PID), zakładają bardziej liniową i przewidywalną dynamikę, przez co mają trudności z utrzymaniem pozycji siłownika dokładnie na zadanym miejscu bez przeregulowań czy oscylacji. Aby w pełni wykorzystać możliwości tych potężnych siłowników, autorzy twierdzą, że logika sterowania musi bezpośrednio uwzględniać niepewność i nieliniowość.
Dodanie rozmytego myślenia do regulatora
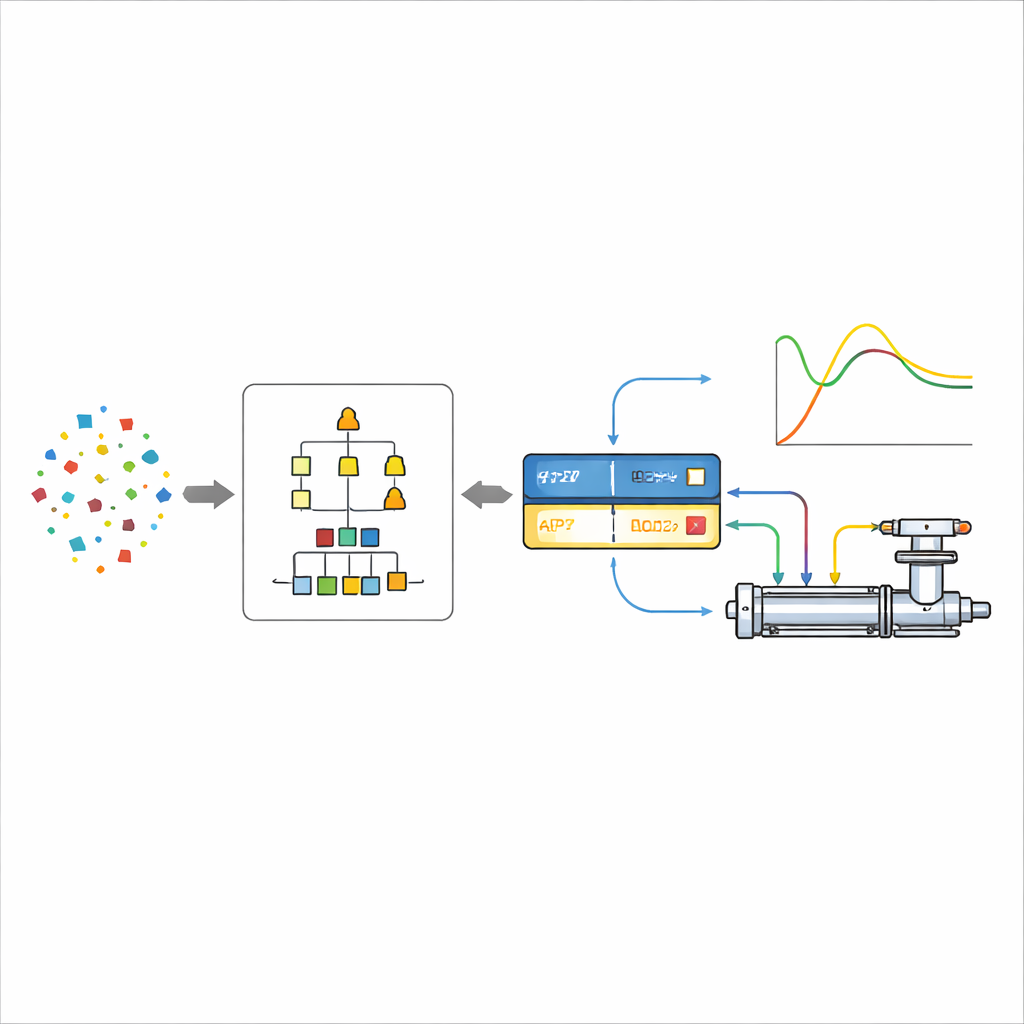
Aby poradzić sobie z tymi niedoskonałościami, badacze zbudowali regulator PID oparty na logice rozmytej typu przedziałowego (interval type‑2). W istocie logika rozmyta pozwala regulatorowi stosować reguły przypominające ludzkie rozumowanie — na przykład „jeżeli błąd pozycji jest mały, ale szybko się zmienia, złagodź działanie” — a rozmyte zbiory typu przedziałowego idą o krok dalej, jawnie modelując niepewność tych reguł. Zespół najpierw opracował szczegółowy model matematyczny siłownika hydraulicznego i jego elektroniki, włączając sensory, zawory serwo i obciążenia stosowane w stawach skokowych i kolanowych robota. Następnie osadzili logikę rozmytą wokół standardowej struktury PID, z wejściami opisującymi błąd pozycji i szybkość jego zmiany oraz z wyjściami korygującymi sygnał sterujący. Aby zachować praktyczny charakter projektu, uprościli kształty wyjść regulatora, jednocześnie pozwalając na bogate nieliniowe zachowania dzięki regułom rozmytym na wejściu.
Pozwolenie algorytmowi ewolucyjnemu na strojeniem
Ręczne zaprojektowanie takiego regulatora rozmytego wymagałoby zgadywania dużej liczby parametrów — od kształtów funkcji przynależności po wzmocnienia skalujące. Zamiast tego autorzy pozwalają algorytmowi ewolucyjnemu automatycznie przeszukiwać przestrzeń ustawień w poszukiwaniu dobrych konfiguracji. Wprowadzają udoskonalony, ograniczony wariant różnicowej ewolucji nazwany ICBNDE, który traktuje każdą możliwą konfigurację regulatora jako osobnika w populacji. Grupy tych osobników są mutowane i rekombinowane, przy zastosowaniu specjalnych reguł faworyzujących rozwiązania, które jednocześnie dobrze działają i spełniają inżynierskie ograniczenia, takie jak czas ustalania czy dokładność w stanie ustalonym. Algorytm wykorzystuje sprytną strategię „lepszy i najbliższy” do kierowania poszukiwaniem oraz zachłanny etap dopracowania, gdy postęp się zatrzymuje, unikając wrażliwego dostrajania współczynników kar stosowanych w wielu metodach optymalizacji.
Jak dobrze działa nowe podejście
Pierwotnie zespół testuje samą metodę optymalizacji na standardowej puli matematycznych problemów benchmarkowych używanych na całym świecie do oceny algorytmów z ograniczeniami. ICBNDE konsekwentnie znajduje dopuszczalne, bliskie optymalnym rozwiązania i wykazuje dużą niezawodność w powtarzalnych uruchomieniach, często dorównując lub przewyższając klasyczne metody. Następnie stosują go do rzeczywistego celu: strojenia rozmytego regulatora PID dla ich siłownika hydraulicznego, a dla porównania — strojenia konwencjonalnego PID w tych samych warunkach. W testach śledzenia w stylu częstotliwości, gdzie siłownik podąża za zmieniającymi się sinusoidalnymi zadaniami, zoptymalizowany regulator rozmyty generuje znacząco mniejsze błędy pozycji niż najlepszy PID. Testy skokowe, w których zadanie przeskakuje między różnymi pozycjami, pokazują, że regulator rozmyty zazwyczaj osiąga mniejszy błąd w stanie ustalonym, szczególnie przy większych skokach, podczas gdy PID czasami ustala się nieco szybciej. W końcu, w porównaniu z kilkoma innymi zaawansowanymi schematami optymalizacyjnymi, ICBNDE dostarcza bardziej spójnych projektów regulatorów, z lepszą medianą i średnią wydajnością oraz mniejszą zmiennością między uruchomieniami.
Co to oznacza dla przyszłych robotów
Mówiąc wprost, badanie pokazuje, że połączenie regulatora „rozmytego” z inteligentnym strojeniem ewolucyjnym może uczynić hydrauliczne przeguby robotów bardziej precyzyjnymi i odpornymi niż metody tradycyjne, bez konieczności ręcznego dopracowywania każdego parametru przez eksperta od sterowania. Rozmyty PID naturalnie radzi sobie z nieuporządkowanym, asymetrycznym zachowaniem rzeczywistych siłowników, podczas gdy algorytm ICBNDE niezawodnie przeszukuje złożoną przestrzeń projektową i respektuje praktyczne ograniczenia dotyczące prędkości i dokładności. Chociaż wciąż istnieje pole do przyspieszenia procesu optymalizacji i dalszego udoskonalenia algorytmu, praca ta wskazuje drogę ku przyszłości, w której roboty humanoidalne o dużej mocy będą poruszać się z płynnością i niezawodnością potrzebną do wymagających zadań w rzeczywistym świecie.
Cytowanie: Chen, X., Dong, H., Shen, C. et al. Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm. Sci Rep 16, 10426 (2026). https://doi.org/10.1038/s41598-026-41203-0
Słowa kluczowe: hydraulika robotów humanoidalnych, rozmyte sterowanie PID, różnicowa ewolucja, nieliniowe układy serwo, algorytmy optymalizacji