Clear Sky Science · ja
改良拘束差分進化アルゴリズムによる区間型2次ファジィ論理PID制御器の最適化
ロボットの体を賢く動かす筋肉
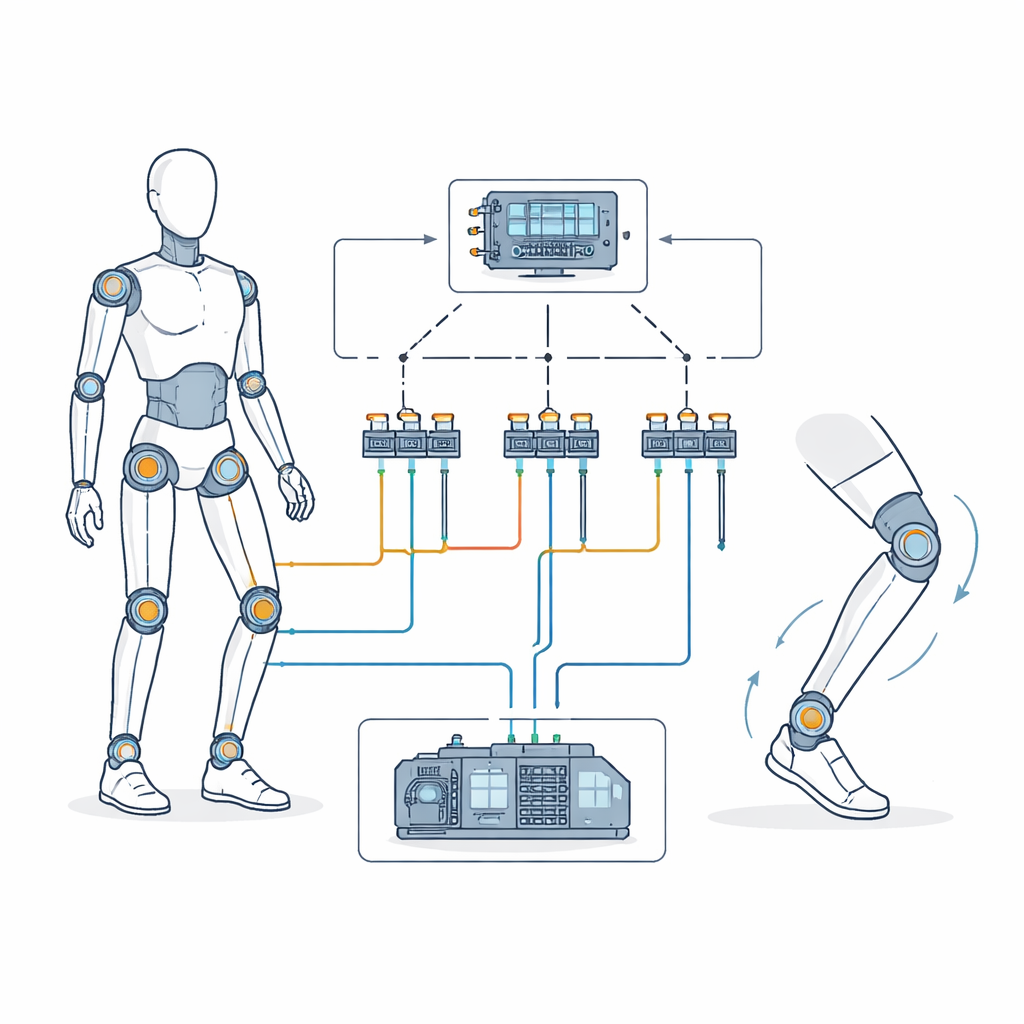
歩行や跳躍、重荷物の運搬を行うヒューマノイドロボットは、電動モータよりも小さな空間に多くの出力を詰め込めるため、しばしば油圧「筋肉」に頼ります。しかし、これらの油圧システムを滑らかかつ正確に動かすのは非常に難しい。挙動は非線形で敏感、予測しにくいからです。本論文は、高度な制御器を自動で調整する新たな方法を提示し、ヒューマノイドの油圧関節をより正確で安定し、設計しやすくすることを目指します。
油圧関節が制御しにくい理由
油圧アクチュエータは、加圧された油で駆動されるコンパクトなシリンダを通じて大きな力を発生できます。本研究で扱うヒューマノイドは、複数の脚部シリンダに油を供給する可搬型の油圧パワーユニット(ポンプ、バルブ、蓄圧器、クーラを含む)を使用しています。こうしたハードウェアは高出力を提供しますが、シリンダ自体は伸展と縮小で応答が異なり、圧力、流量、負荷に応じて挙動が変化します。馴染みのある比例–積分–微分(PID)制御などの単純な制御方式は、より線形で予測可能な動特性を仮定するため、オーバーシュートや振動なしに位置を厳密に追従させるのが難しいのです。著者らは、これら強力なアクチュエータを最大限に活用するには、制御ロジックが不確実性や非線形性を直接扱えることが必要だと主張しています。
制御器にファジィ思考を導入する
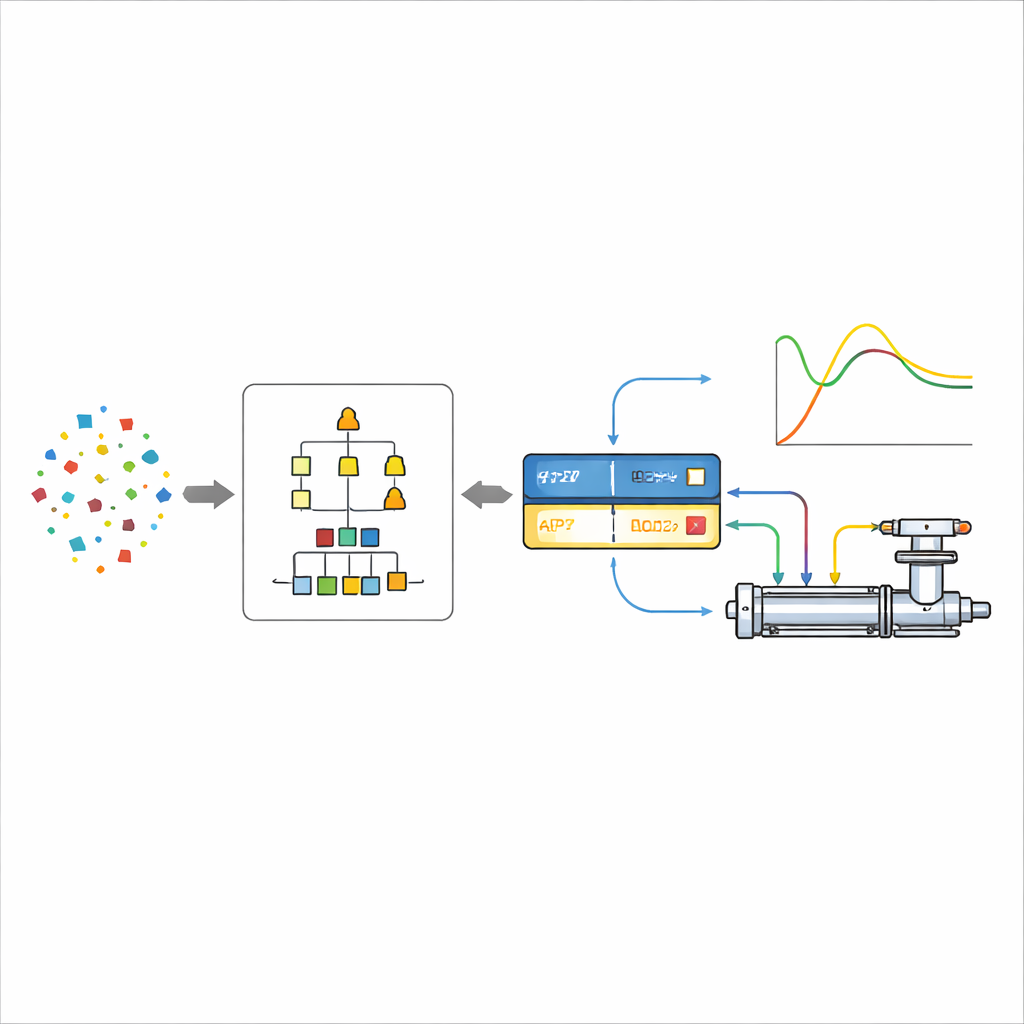
この課題に対処するため、研究チームは区間型2次ファジィ論理PID制御器を構築しました。要するに、ファジィ論理は「位置誤差が小さいが変化が速いなら勢いを抑える」といった、人間の推論に近いルールを制御器に使わせることを可能にし、区間型2次ファジィ集合はそのルールの不確実性を明示的にモデル化する点で一歩進んでいます。チームはまず、シリンダとその電子機器(センサ、サーボバルブ、ロボットの足首および膝関節にかかる負荷を含む)の詳細な数理モデルを作成しました。次に、通常のPID構造の周りにファジィ論理を組み込み、入力として位置誤差とその変化率を与え、出力で制御努力を調整します。設計の実用性を保つために、出力形状は簡素化しつつも、ファジィ入力ルールを通じて豊かな非線形挙動を許容しています。
進化的アルゴリズムに調整を任せる
このようなファジィ制御器を手作業で設計するには、メンバシップ関数の形状からスケーリングゲインまで多くのパラメータを推測する必要があります。そこで著者らは進化的アルゴリズムに良好な設定探索を自動で行わせます。彼らはICBNDEと呼ぶ改良拘束差分進化法を導入し、各候補制御器を個体と見なして集団を構成します。個体群は突然変異や再結合を受け、収束条件を満たしつつ定常精度や定着時間などの工学的制約を守る解を優先する特別なルールで扱われます。探索を導く「より良くかつ近い(better and nearest)」戦略や、進展が停滞した際に行う貪欲な精練ステップなどの工夫により、多くの最適化手法が必要とする繊細なペナルティ因子を避けています。
新手法の有効性
まず、チームは最適化手法単独を、拘束付きアルゴリズムの評価に世界的に使われる標準的な数学的ベンチマーク問題群で検証しました。ICBNDEは一貫して実行可能でほぼ最適な解を見つけ、繰り返し試行に対する信頼性が高く、従来手法に匹敵またはそれを上回る結果を示しました。次に実ターゲットに適用し、油圧シリンダ用のファジィPIDを調整すると同時に、比較のために同条件下で従来のPIDも調整しました。周波数追従試験(シリンダが時間変化する正弦目標に追従する)では、最適化されたファジィ制御器が最良のPIDよりも位置誤差を顕著に小さくしました。ステップ応答試験(目標が異なる位置間で跳ぶ)では、ファジィ制御器は一般に定常誤差が小さく、特に大きなストロークで優位でしたが、PIDがやや速く定着する場合もありました。最後に、いくつかの他の先進的最適化スキームと比較しても、ICBNDEは中央値・平均性能が良好で、試行間のばらつきが少ない一貫した制御器設計をもたらしました。
将来のロボットへの意義
簡潔に言えば、本研究は「ファジィ」制御器と賢い進化的チューナーを組み合わせることで、油圧ロボット関節を従来手法よりも精密かつ堅牢にでき、すべてのパラメータを制御の専門家が手作業で設計する必要がなくなることを示しています。ファジィPIDは実際のシリンダの雑で非対称な挙動を自然に扱い、ICBNDEアルゴリズムは複雑な設計空間を確実に探索して速度や精度に関する実用的な制約を尊重します。最適化の高速化やアルゴリズムのさらなる洗練の余地は残されているものの、この仕事は高出力ヒューマノイドが実世界の厳しい課題に必要な滑らかさと信頼性をもって動ける未来を示唆しています。
引用: Chen, X., Dong, H., Shen, C. et al. Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm. Sci Rep 16, 10426 (2026). https://doi.org/10.1038/s41598-026-41203-0
キーワード: ヒューマノイドロボット油圧, ファジィPID制御, 差分進化, 非線形サーボシステム, 最適化アルゴリズム