Clear Sky Science · ar
تحسين منظم PID المبني على المنطق الضبابي ذي النوع-2 الفاصل بواسطة خوارزمية تحسين تفاضلية مقيدة محسّنة
عضلات أذكى لأجسام الروبوت
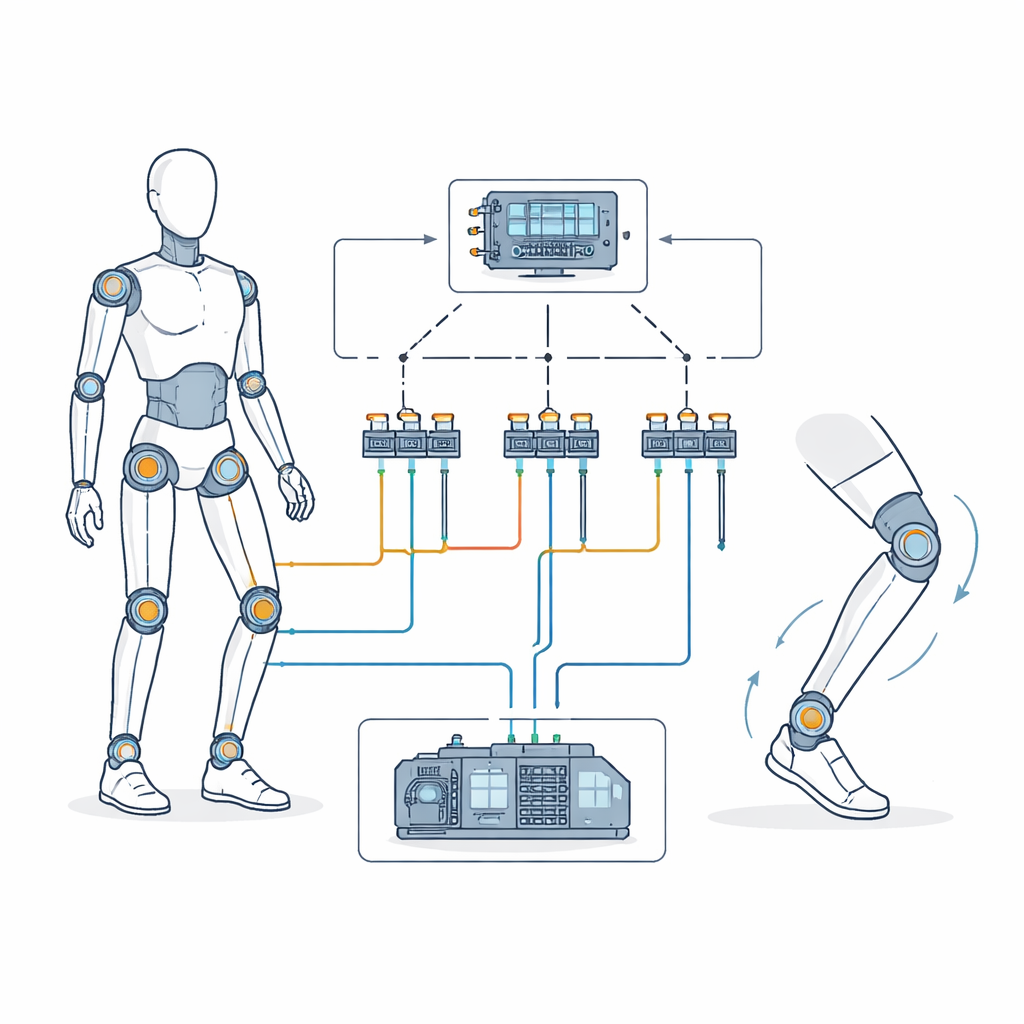
تعتمد الروبوتات الشبه بشرية التي تمشي وتقفز وتحمل أحمالاً كبيرة غالباً على "عضلات" هيدروليكية لأنها تستطيع حزم طاقة أكبر بكثير في مساحة صغيرة مقارنة بالمحركات الكهربائية. لكن جعل هذه الأنظمة الهيدروليكية تتحرك بسلاسة ودقة أمر معروف بصعوبته: سلوكها غير خطي وحساس ويصعب التنبؤ به. تقدم هذه الورقة طريقة جديدة لضبط منظم متقدم تلقائياً بحيث تصبح مفاصل الروبوت الهيدروليكية أكثر دقة واستقراراً وأسهل في التصميم.
لماذا يصعب التحكم في المفاصل الهيدروليكية
يمكن للمشغلات الهيدروليكية أن تولد قوى هائلة عبر أسطوانات مدمجة تعمل بزيت مضغوط. الروبوت الشبه بشري الذي تدرسه هذه الورقة يستخدم وحدة طاقة هيدروليكية متنقلة مع مضخات وصمامات ومخازن ومبردات لتغذية عدة أسطوانات في الساقين. بينما توفر هذه الأجهزة طاقة كبيرة، تستجيب الأسطوانات نفسها بشكل مختلف عند الامتداد والسحب، ويتغير سلوكها بتغير الضغط والتدفق والحمل. تفترض مخططات التحكم البسيطة، مثل منظم النسبة-التكامل-التفاضل (PID) المعروف، ديناميكيات أكثر خطية ويمكن التنبؤ بها، لذا تكافح للحفاظ على موضع الأسطوانة بدقة دون تجاوز أو تذبذب. للحصول على أقصى استفادة من هذه المشغلات القوية، يجادل المؤلفون بأن منطق التحكم يجب أن يكون قادراً على التعامل مع عدم اليقين واللاخطية بشكل مباشر.
إضافة التفكير الضبابي إلى المنظم
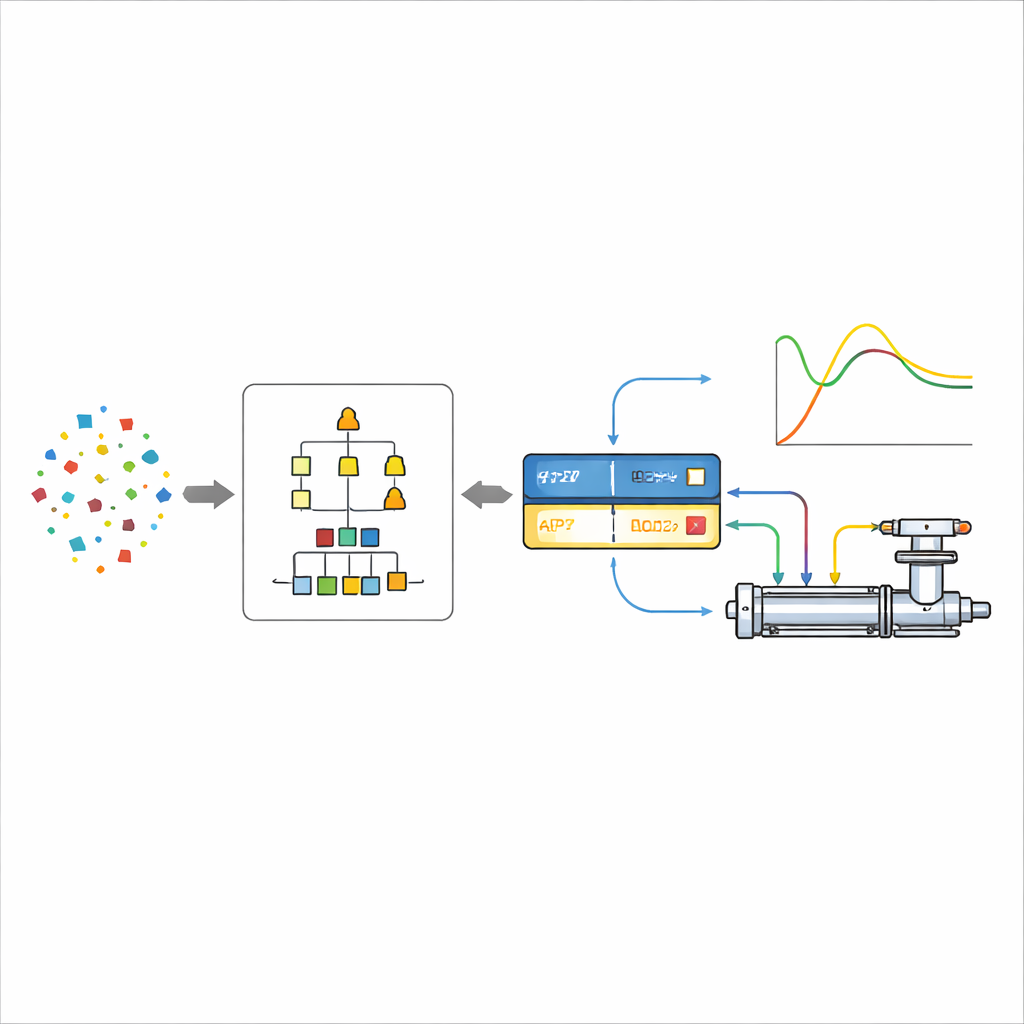
لمعالجة هذه التعقيدات، يبني الباحثون منظم PID ضبابي من النوع-2 الفاصل. في الجوهر، يسمح المنطق الضبابي للمنظم باستخدام قواعد تبدو أقرب إلى التفكير البشري—مثل "إذا كان خطأ الموضع صغيراً لكنه يتغير بسرعة، خفف الجهد"— وتذهب مجموعات الضبابية من النوع-2 الفاصل خطوة أبعد عبر نمذجة عدم اليقين في تلك القواعد بشكل صريح. يقوم الفريق أولاً بتطوير نموذج رياضي مفصل للأسطوانة الهيدروليكية وإلكترونياتها، بما في ذلك أجهزة الاستشعار والصمامات الخدمية والأحمال المستخدمة في مفاصل الكاحل والركبة للروبوت. ثم يضمنون المنطق الضبابي حول هيكل PID التقليدي، مع مدخلات تصف خطأ الموضع وسرعة تغيره، ومخرجات تعدّل جهد التحكم. للحفاظ على التصميم عملياً، يبسطون أشكال مخرجات المنظم مع الاستمرار في السماح بسلوك لاخطي غني عبر قواعد الإدخال الضبابية.
ترك خوارزمية تطورية تقوم بالضبط
تصميم مثل هذا المنظم الضبابي يدوياً سيتطلب تخمين عدد كبير من المعاملات، من أشكال دوال العضوية إلى مكاسب التحجيم. بدلاً من ذلك، يتيح المؤلفون لخوارزمية تطورية البحث تلقائياً عن إعدادات جيدة. يقدمون طريقة تحول تفاضلي مقيدة محسنة اسمها ICBNDE، التي تعامل كل منظمات ممكنة كفرد في تجمع سكاني. تُطفَر وتُعاد تركيبات مجموعات من هؤلاء الأفراد، مع قواعد خاصة تفضّل الحلول التي تؤدي أداءً جيداً وتلتزم بحدود هندسية مثل زمن الاستقرار ودقة الحالة المستقرة. تستخدم الخوارزمية استراتيجية ذكية "الأفضل والأقرب" لتوجيه البحث وخطوة تحسين جشعة عند توقف التقدم، متجنبة عوامل العقوبة الحساسة التي تتطلبها العديد من طرق التحسين.
ما مدى فاعلية النهج الجديد
أولاً، يختبر الفريق طريقة التحسين الخاصة بهم بمفردها على مجموعة معيارية من المسائل الرياضية القياسية المستخدمة عالمياً لتقييم الخوارزميات المقيدة. تجد ICBNDE باستمرار حلولاً ممكنة وشبه مثالية وتظهر موثوقية قوية عبر تجارب متكررة، غالباً ما تطابق أو تتفوق على الطرق الكلاسيكية. ثم يطبّقونها على الهدف الحقيقي: ضبط منظم PID الضبابي لأسطوانتهم الهيدروليكية، وبالمقارنة، ضبط PID التقليدي بنفس الشروط. في اختبارات تتبع من نوع التردد، حيث تتبع الأسطوانة أهدافاً جيبية متغيرة، ينتج المنظم الضبابي المحسّن أخطاء موضع أصغر بكثير من أفضل PID. تُظهر اختبارات القفزة، حيث يقفز الهدف بين مواضع مختلفة، أن المنظم الضبابي يحقق عموماً خطأ حالة مستقرة أدنى، خصوصاً للمسارات الأكبر، بينما أحياناً يستقر PID أسرع بعض الشيء. أخيراً، عند مقارنته مع عدة مخططات تحسين متقدمة أخرى، تقدم ICBNDE تصاميم منظمات أكثر اتساقاً، مع أداء وسيط ومتوسط أفضل وتباين أقل بين التجارب.
ماذا يعني هذا لروبوتات المستقبل
بعبارات بسيطة، تُظهر الدراسة أن الجمع بين منظم "ضبابي" ومعدّل تطوري ذكي يمكن أن يجعل مفاصل الروبوتات الهيدروليكية أكثر دقة ومتانة من الأساليب التقليدية، دون الحاجة إلى خبير تحكم ليصنع كل معلمة يدوياً. يتعامل PID الضبابي طبيعياً مع السلوك الفوضوي وغير المتماثل للأسطوانات الحقيقية، بينما تبحث خوارزمية ICBNDE بثقة في فضاء التصميم المعقد وتحترم حدود السرعة والدقة العملية. وعلى الرغم من وجود مجال لتسريع التحسين وصقل الخوارزمية أكثر، تشير هذه العمل إلى مستقبل يمكن أن تتحرك فيه الروبوتات الشبه بشرية عالية القوة بسلاسة وموثوقية تكفي لمهام العالم الواقعي المتطلبة.
الاستشهاد: Chen, X., Dong, H., Shen, C. et al. Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm. Sci Rep 16, 10426 (2026). https://doi.org/10.1038/s41598-026-41203-0
الكلمات المفتاحية: هيدروليكيات الروبوتات الشبه بشرية, تحكم PID ضبابي, التحول التفاضلي, أنظمة الخادم غير الخطية, خوارزميات التحسين