Clear Sky Science · he
אופטימיזציה של בקרה PID פאזית מסוג מרוכב מסוג אינטרוול־טיפוס‑2 בעזרת אלגוריתם אבולוציוני משופר להבדל
שריר חכם יותר לגוף הרובוט
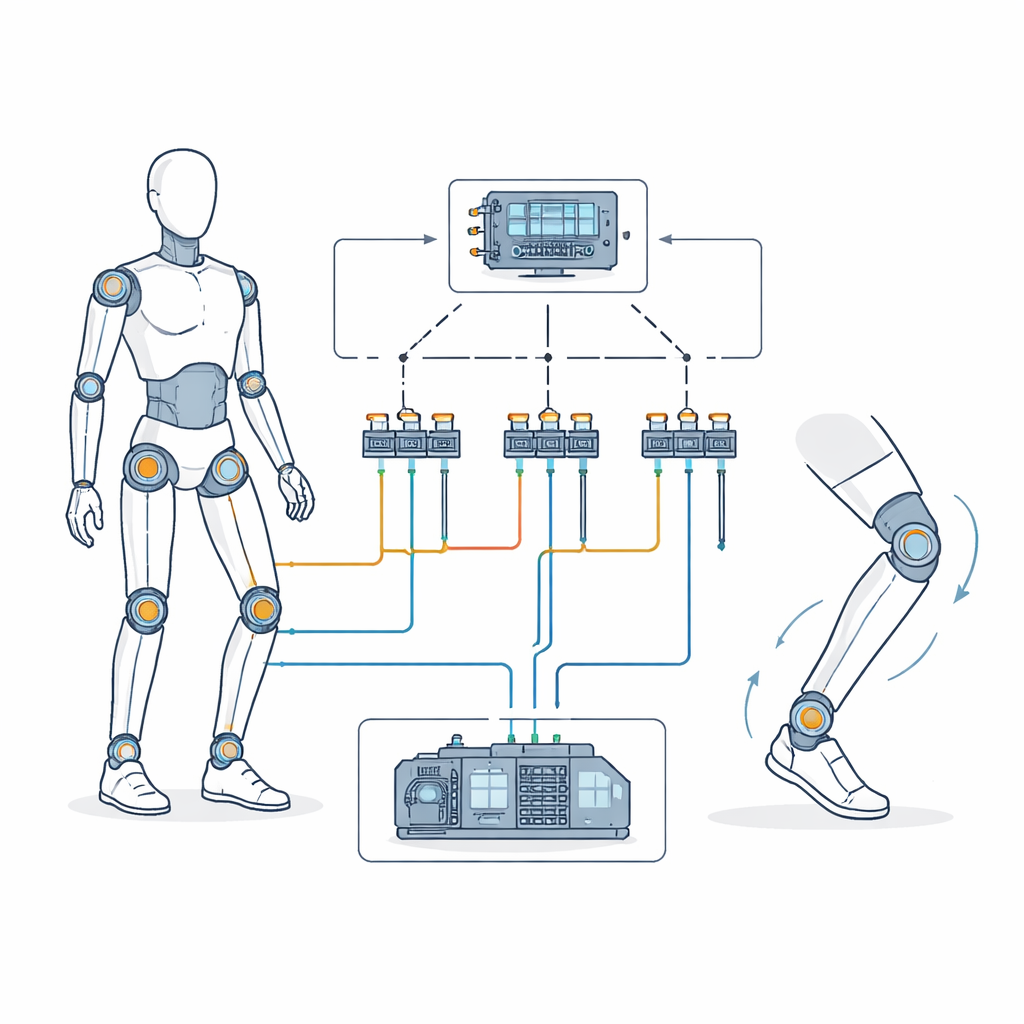
רובוטים דמויי אדם שמהלכים, קופצים ונושאים עומסים כבדים נוטים להשתמש ב"שרירים" הידראוליים מכיוון שהם מסוגלים לספק הרבה יותר כוח בנפח קטן מאשר מנועים חשמליים. אבל לגרום למערכות ההידראוליות האלה לנוע בצורה חלקה ומדויקת הוא אתגר ידוע: ההתנהגות שלהן לא‑ליניארית, רגישה וקשה לצפייה מראש. מאמר זה מציג שיטה חדשה לכוונון אוטומטי של בקר מתקדם כך שמפרקי הידראוליקה ברובוט דמוי‑אדם יהיו מדויקים יותר, יציבים יותר וקל יותר לעיצוב.
מדוע מפרקי הידראוליקה קשים לשליטה
פעילים הידראוליים יכולים להניע כוחות עצומים בעזרת צילינדרים קומפקטיים המונעים על ידי שמן בלחץ. הרובוט הנחקר כאן משתמש ביחידת כוח הידראולית ניידת עם משאבות, שסתומים, מצברי לחץ ומצננים לסיפוק כמה צילינדרים ברגליים. בעוד שפרט זה מספק כוח רב, הצילינדרים עצמם מגיבים אחרת בהארכה מאשר בהיסגרות, וההתנהגות שלהם משתנה בהתאם ללחץ, לזרימה ולעומס. סכמות בקרה פשוטות, כמו בקר PID המוכר (פרופורציונלי–אינטגרלי–דיפרנציאלי), מניחות דינמיקה יותר ליניארית וניבוית, ולכן מתקשות לשמור על מיקום הצילינדר במטרה ללא גלישת יתר או תהודה. כדי להפיק את המיטב מהפעילים האלה, המחברים טוענים שהלוגיקה הבקרתית חייבת להתמודד עם אי‑וודאות ולא‑ליניאריות באופן ישיר.
הוספת חשיבה פאזית לבקר
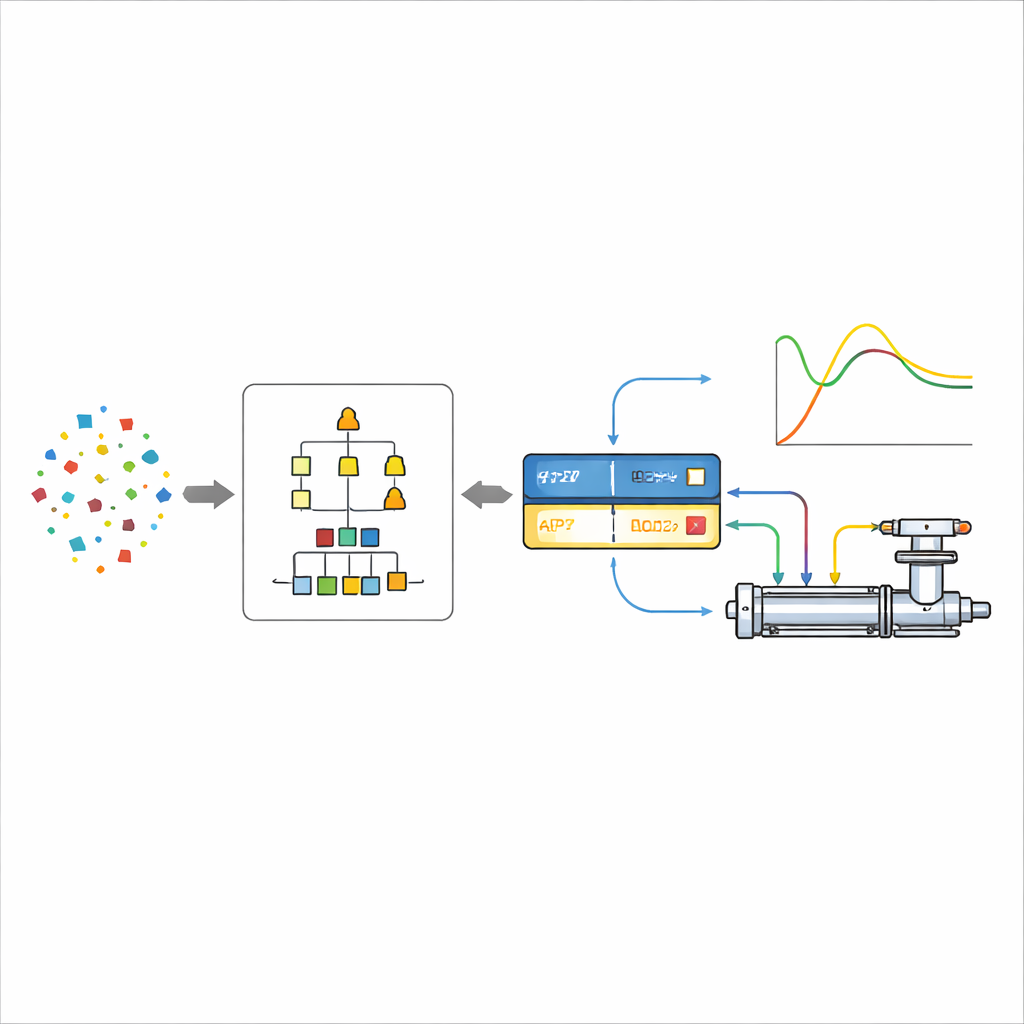
כדי להתמודד עם התכונות הלא צפויות הללו, החוקרים בונים בורר PID מבוסס לוגיקה פאזית מסוג אינטרוול‑טיפוס‑2. בבסיסו, לוגיקה פאזית מאפשרת לבקר להשתמש בכלליים שנשמעים יותר כמו חשיבה אנושית — למשל "אם שגיאת המיקום קטנה אך משתנה במהירות, הקל בקו ההנחיה" — וקבוצות פאזיות מסוג אינטרוול‑טיפוס‑2 לוקחות צעד נוסף על‑ידי דגם מפורש של אי‑וודאות בכלליים אלה. הצוות מפתח תחילה מודל מתמטי מפורט של הצילינדר ההידראולי והאלקטרוניקה הנלוות, כולל חיישנים, שסתומי סרו ועומסים שנמצאים בפרקי כף הרגל והברך של הרובוט. לאחר מכן הם משבצים את הלוגיקה הפאזית סביב מבנה ה‑PID הרגיל, עם קלטים המתארים את שגיאת המיקום ואת קצב השינוי שלה, ותפוקות שמכווננות את מאמץ הבקרה. כדי לשמור על מעשיות העיצוב, הם מפשטים את צורות התפוקות של הבקר תוך שמירה על התנהגות לא‑ליניארית עשירה דרך כללי הקלט הפאזיים.
להניח לאלגוריתם אבולוציוני לכוונן
עיצוב בקר פאזי כזה בעבודה ידנית ידרוש ניחושים רבים של פרמטרים, מצורות פונקציות חברות ועד להגדרות קנה מידה. במקום זאת, המחברים מאפשרים לאלגוריתם אבולוציוני לחפש באופן אוטומטי הגדרות טובות. הם מציגים שיטת אבולוציה דיפרנציאלית משופרת ומושלמת בשם ICBNDE, שמטפלת בכל בקר אפשרי כפרט באוכלוסייה. קבוצות של פרטים אלו עוברים מוטציה ושילוב מחדש, עם כללים מיוחדים שמטבים פתרונות שמבצעים טוב ושמכבדים מגבלות הנדסיות כגון זמן התייצבות ודיוק מצב־קבוע. האלגוריתם משתמש באסטרטגיית "הטוב והקרוב ביותר" להכוונת החיפוש ובצעד השבחת אלוף‑מקום חסר־רחמים כאשר ההתקדמות תקועה, ובכך נמנע מהצורך בגורמי עונש עדינים שלעיתים נדרשים בשיטות אופטימיזציה אחרות.
עד כמה השיטה החדשה עובדת
ראשית, הצוות בודק את שיטת האופטימיזציה לבדה על סט סטנדרטי של בעיות מבחן מתמטיות המשמשות ברחבי העולם לשיפוט אלגוריתמים עם מגבלות. ICBNDE מוצא בעקביות תשובות ישימות וקרובות לאופטימום ומראה אמינות חזקה על פני הרצות חוזרות, לעתים מהווה או גובר על שיטות קלאסיות. לאחר מכן הם מיישמים אותה למטרה המעשית: כוונון בקר PID פאזי לצילינדר ההידראולי שלהם, ולשוואה כוונון PID קונבנציונלי בתנאים זהים. במבחני מעקב בסגנון תדירות, שבהם הצילינדר עוקב אחר מטרות סינוסואידליות משתנות, הבקר הפאזי הממוטב מפיק שגיאות מיקום קטנות משמעותית מה‑PID הטוב ביותר. במבחני קפיצת יעד, שבהם היעד קופץ בין מיקומים שונים, הבקר הפאזי בדרך כלל משיג שגיאת מצב‑קבוע נמוכה יותר, במיוחד למהלכים גדולים, בעוד ה‑PID לעיתים מתייצב מעט מהר יותר. לבסוף, בהשוואה למספר שיטות אופטימיזציה מתקדמות אחרות, ICBNDE מספק עיצובים יציבים יותר של בקרים, עם ביצועים חציוניים וממוצעים טובים יותר ופחות שונות בין הרצות.
מה זה אומר עבור רובוטים בעתיד
בקצרה, המחקר מראה ששילוב של בקר "פאזי" עם מכוון אבולוציוני חכם יכול להפוך מפרקי הידראוליקה של רובוטים לדייקנים ועמידים יותר מאשר שיטות מסורתיות, מבלי להעמיס על מומחה בקרה לכוונן ידנית כל פרמטר. ה‑PID הפאזי מטפל באופן טבעי בהתנהגות המבולגנת והאסימטרית של צילינדרים אמיתיים, בעוד אלגוריתם ICBNDE מחפש באופן מהימן במרחב העיצוב המורכב ומכבד מגבלות מעשיות על מהירות ודיוק. אף שיש עוד מקום לייעל את המהירות של האופטימיזציה ולשכלל את האלגוריתם, העבודה מצביעה לכיוון עתיד שבו רובוטים דמויי‑אדם בעלי כוח גבוה יוכלו לנוע בחלקות ובאמינות הנדרשות למשימות תובעניות בעולם האמיתי.
ציטוט: Chen, X., Dong, H., Shen, C. et al. Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm. Sci Rep 16, 10426 (2026). https://doi.org/10.1038/s41598-026-41203-0
מילות מפתח: הידראוליקה של רובוטים דמויי‑בני‑אדם, בקרות PID פאזיות, אלגוריתם אבולוציה דיפרנציאלי, מערכות סרוו לא‑ליניאריות, אלגוריתמי אופטימיזציה