Clear Sky Science · it
Ottimizzazione di un controllore PID fuzzy di tipo 2 a intervallo con un algoritmo evolutivo di differenziale migliorato con vincoli
Un muscolo più intelligente per i corpi robotici
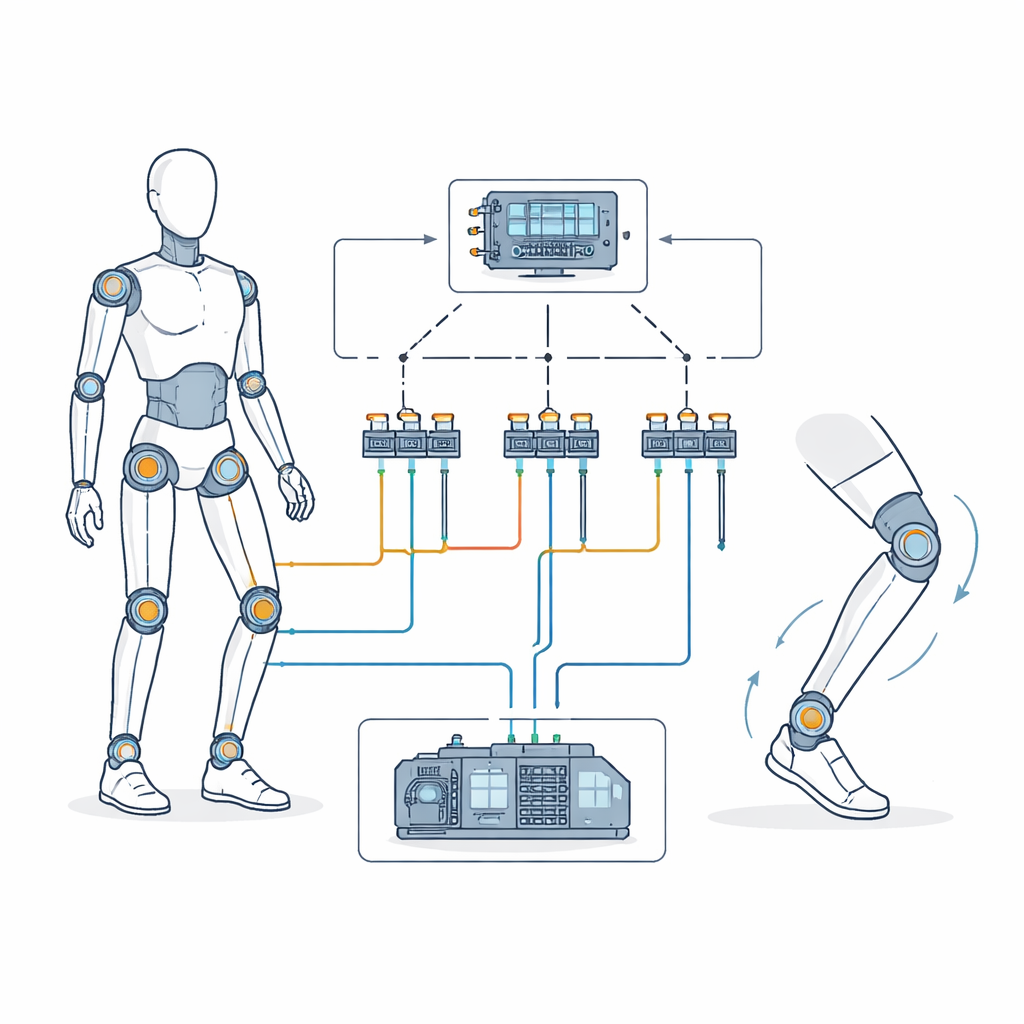
I robot umanoidi che camminano, saltano e trasportano carichi pesanti spesso si affidano a “muscoli” idraulici perché possono concentrare molta più potenza in uno spazio ridotto rispetto ai motori elettrici. Tuttavia, far muovere questi sistemi idraulici in modo fluido e preciso è notoriamente difficile: il loro comportamento è non lineare, sensibile e difficile da prevedere. Questo articolo presenta un nuovo metodo per sintonizzare automaticamente un controllore avanzato, così che le articolazioni idrauliche di un robot umanoide diventino più accurate, più stabili e più semplici da progettare.
Perché le articolazioni idrauliche sono difficili da controllare
Gli attuatori idraulici possono erogare forze enormi attraverso cilindri compatti azionati da olio pressurizzato. Il robot umanoide studiato qui utilizza un’unità di potenza idraulica mobile con pompe, valvole, accumulatori e raffreddatori per alimentare diversi cilindri nelle gambe. Pur fornendo molta potenza, i cilindri rispondono in modo diverso durante l’estensione e la retrazione, e il loro comportamento varia con la pressione, la portata e il carico. Gli schemi di controllo semplici, come il familiare regolatore proporzionale–integrale–derivativo (PID), assumono dinamiche più lineari e prevedibili, perciò faticano a mantenere la posizione del cilindro precisamente sull’obiettivo senza sovraelongazione o oscillazioni. Per sfruttare al massimo questi attuatori potenti, sostengono gli autori, la logica di controllo deve poter gestire direttamente l’incertezza e la non linearità.
Aggiungere il pensiero fuzzy al controllore
Per affrontare queste idiosincrasie, i ricercatori costruiscono un controllore PID fuzzy di tipo 2 a intervallo. In sostanza, la logica fuzzy permette al controllore di usare regole che somigliano al ragionamento umano — per esempio “se l’errore di posizione è piccolo ma sta cambiando rapidamente, allenta” — e gli insiemi fuzzy di tipo 2 a intervallo fanno un passo avanti modellando esplicitamente l’incertezza in quelle regole. Il team sviluppa innanzitutto un modello matematico dettagliato del cilindro idraulico e della sua elettronica, inclusi sensori, valvole di servo e carichi utilizzati nelle articolazioni della caviglia e del ginocchio del robot. Poi integra la logica fuzzy attorno alla struttura PID usuale, con input che descrivono l’errore di posizione e la sua velocità di variazione, e output che modulano lo sforzo di controllo. Per mantenere il progetto praticabile, semplificano la forma degli output del controllore pur consentendo un comportamento non lineare ricco attraverso le regole fuzzy sugli input.
Lasciare che un algoritmo evolutivo faccia la sintonizzazione
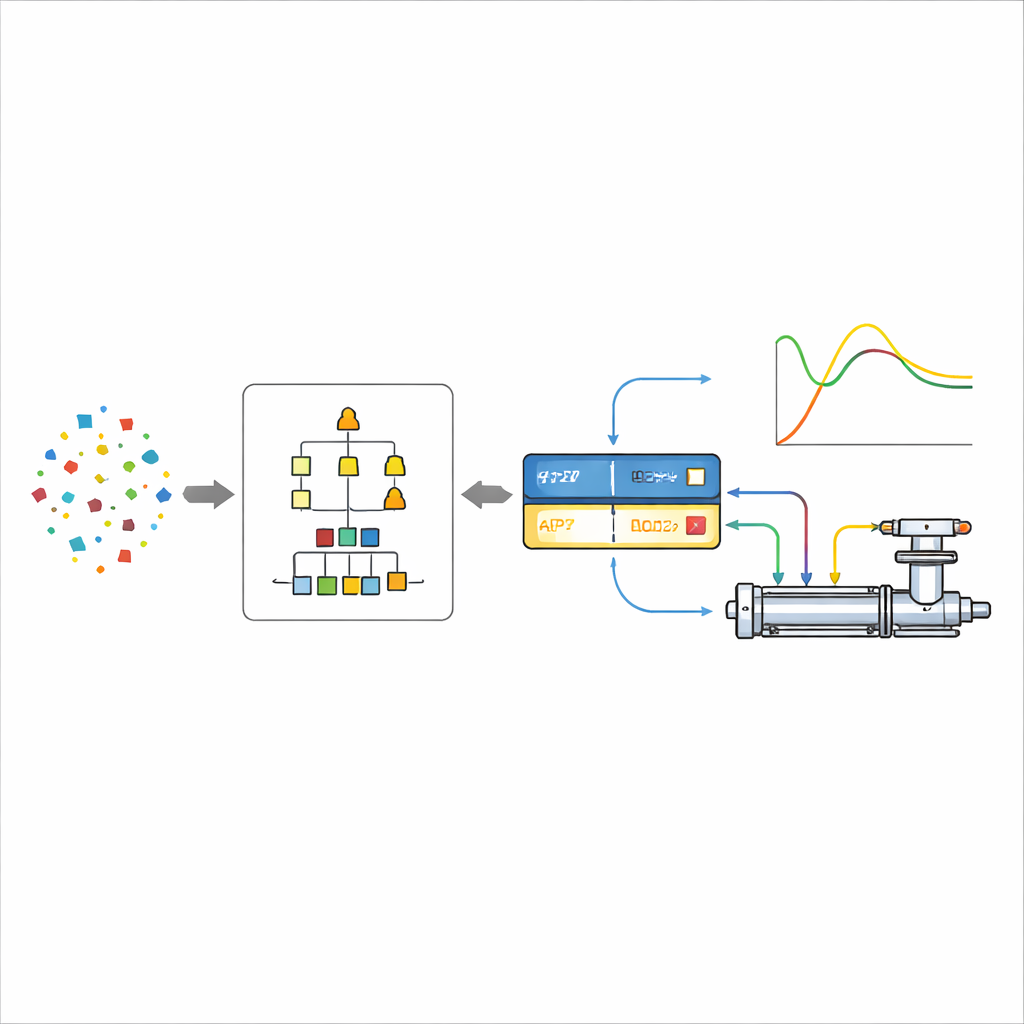
Progettare a mano un controllore fuzzy del genere richiederebbe di ipotizzare un gran numero di parametri, dalle forme delle funzioni di appartenenza ai guadagni di scala. Invece, gli autori lasciano che un algoritmo evolutivo cerchi automaticamente buone configurazioni. Introducono un metodo migliorato di differenziale evolutivo con vincoli chiamato ICBNDE, che tratta ogni possibile controllore come un individuo in una popolazione. Gruppi di questi individui vengono mutati e ricombinati, con regole speciali che favoriscono soluzioni che siano sia performanti sia conformi a limiti ingegneristici come tempo di assestamento e precisione allo stato stazionario. L’algoritmo usa una strategia intelligente di “migliore e più vicino” per guidare la ricerca e un passo di raffinamento greedy quando il progresso rallenta, evitando i delicati fattori di penalità che molti metodi di ottimizzazione richiedono.
Quanto funziona bene il nuovo approccio
Per prima cosa, il gruppo testa il loro metodo di ottimizzazione da solo su una suite standard di problemi matematici di riferimento usata a livello mondiale per valutare algoritmi con vincoli. ICBNDE trova con costanza soluzioni fattibili e vicino‑ottimali e mostra una forte affidabilità su più esecuzioni, spesso eguagliando o superando i metodi classici. Successivamente lo applicano al bersaglio reale: la sintonizzazione del controllore PID fuzzy per il loro cilindro idraulico e, per confronto, la sintonizzazione di un PID convenzionale nelle stesse condizioni. Nei test di tracciamento in stile frequenza, dove il cilindro segue obiettivi sinusoidali variabili, il controllore fuzzy ottimizzato produce errori di posizione significativamente più piccoli rispetto al miglior PID. Nei test a gradino, dove l’obiettivo salta tra posizioni diverse, il controllore fuzzy generalmente ottiene un errore stazionario inferiore, specialmente per escursioni maggiori, mentre il PID talvolta si assesta leggermente più rapidamente. Infine, confrontato con altri schemi avanzati di ottimizzazione, ICBNDE offre progetti di controllore più coerenti, con medie e mediane migliori e minore variazione tra le esecuzioni.
Cosa significa questo per i robot del futuro
In termini semplici, lo studio dimostra che combinare un controllore “fuzzy” con un tuner evolutivo intelligente può rendere le articolazioni idrauliche dei robot più precise e robuste rispetto ai metodi tradizionali, senza richiedere a un esperto di controllo di progettare a mano ogni parametro. Il PID fuzzy gestisce in modo naturale il comportamento disordinato e asimmetrico dei cilindri reali, mentre l’algoritmo ICBNDE esplora in modo affidabile lo spazio di progetto complesso e rispetta limiti pratici su velocità e precisione. Pur essendoci ancora margine per velocizzare l’ottimizzazione e perfezionare ulteriormente l’algoritmo, questo lavoro indica una direzione in cui robot umanoidi ad alta potenza possono muoversi con la fluidità e l’affidabilità necessarie per compiti reali impegnativi.
Citazione: Chen, X., Dong, H., Shen, C. et al. Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm. Sci Rep 16, 10426 (2026). https://doi.org/10.1038/s41598-026-41203-0
Parole chiave: idraulica per robot umanoidi, controllo PID fuzzy, differenziale evolutivo, servosistemi non lineari, algoritmi di ottimizzazione