Clear Sky Science · es
Optimización de un controlador PID difuso de tipo‑2 por intervalos con un algoritmo de evolución diferencial mejorado con restricciones
Músculo más inteligente para cuerpos robóticos
Los robots humanoides que caminan, saltan y transportan cargas pesadas suelen recurrir a "músculos" hidráulicos porque pueden concentrar mucha más potencia en un espacio reducido que los motores eléctricos. Pero lograr que estos sistemas hidráulicos se muevan con suavidad y precisión es notoriamente complicado: su comportamiento es no lineal, sensible y difícil de predecir. Este artículo presenta una nueva manera de ajustar automáticamente un controlador avanzado para que las articulaciones hidráulicas de un robot humanoide sean más precisas, más estables y más fáciles de diseñar.
Por qué las articulaciones hidráulicas son difíciles de controlar
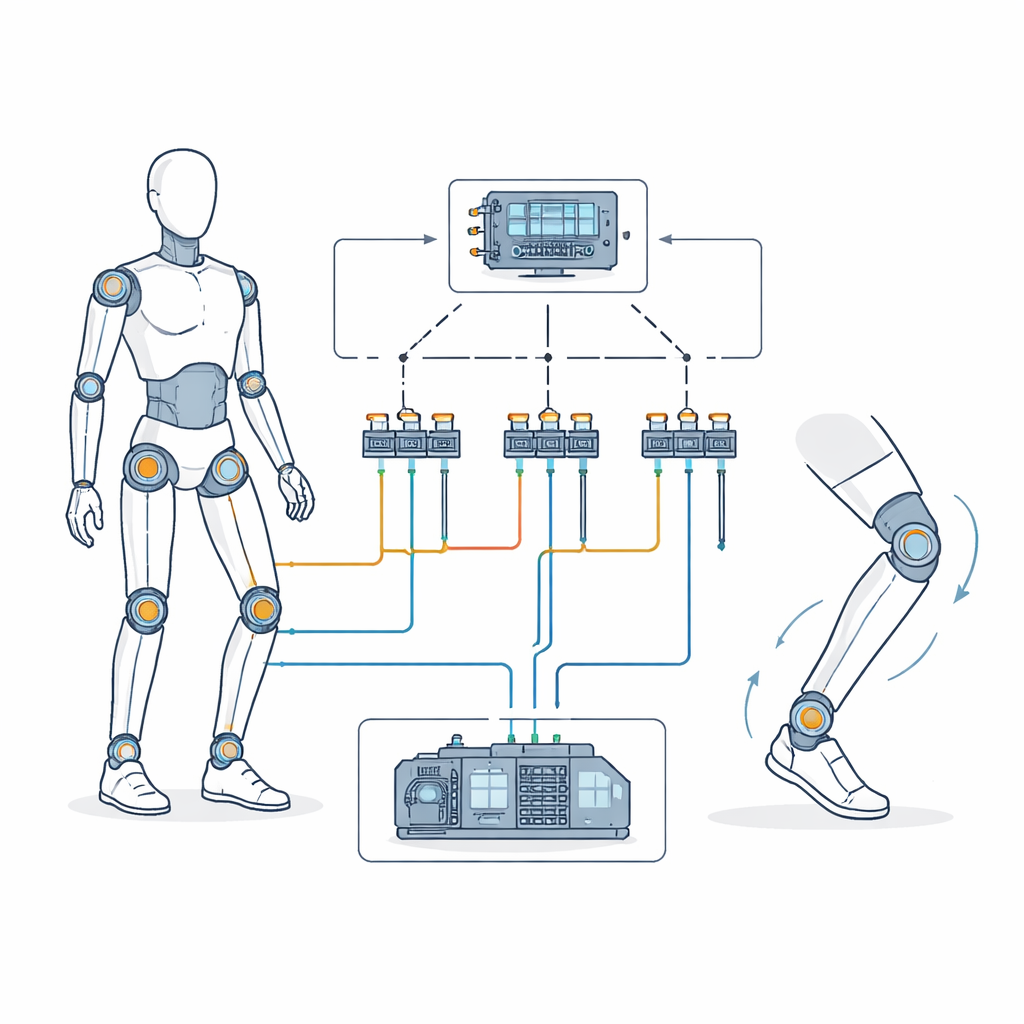
Los actuadores hidráulicos pueden generar fuerzas enormes mediante cilindros compactos impulsados por aceite presurizado. El robot humanoide estudiado aquí emplea una unidad móvil de potencia hidráulica con bombas, válvulas, acumuladores y enfriadores para alimentar varios cilindros en las piernas. Aunque este hardware aporta mucha potencia, los propios cilindros responden de manera diferente al extenderse y retraerse, y su comportamiento varía con la presión, el caudal y la carga. Los esquemas de control simples, como el conocido controlador proporcional‑integral‑derivativo (PID), suponen dinámicas más lineales y previsibles, por lo que tienen dificultades para mantener la posición del cilindro exactamente en el objetivo sin sobreimpulso u oscilaciones. Para aprovechar al máximo estos actuadores potentes, sostienen los autores, la lógica de control debe poder manejar la incertidumbre y la no linealidad de forma directa.
Añadiendo pensamiento difuso al controlador
Para abordar estas peculiaridades, los investigadores construyen un controlador PID difuso de tipo‑2 por intervalos. En esencia, la lógica difusa permite que el controlador use reglas que se parecen más al razonamiento humano —por ejemplo, "si el error de posición es pequeño pero cambia rápidamente, relaja"— y los conjuntos difusos de tipo‑2 por intervalos van un paso más allá al modelar explícitamente la incertidumbre en esas reglas. El equipo desarrolla primero un modelo matemático detallado del cilindro hidráulico y su electrónica, incluidos sensores, válvulas servo y cargas utilizadas en las articulaciones del tobillo y la rodilla del robot. Después integran la lógica difusa alrededor de la estructura PID habitual, con entradas que describen el error de posición y su velocidad de cambio, y salidas que ajustan el esfuerzo de control. Para mantener el diseño práctico, simplifican las formas de salida del controlador sin renunciar a un comportamiento no lineal rico mediante las reglas difusas de entrada.
Dejando que un algoritmo evolutivo haga el ajuste
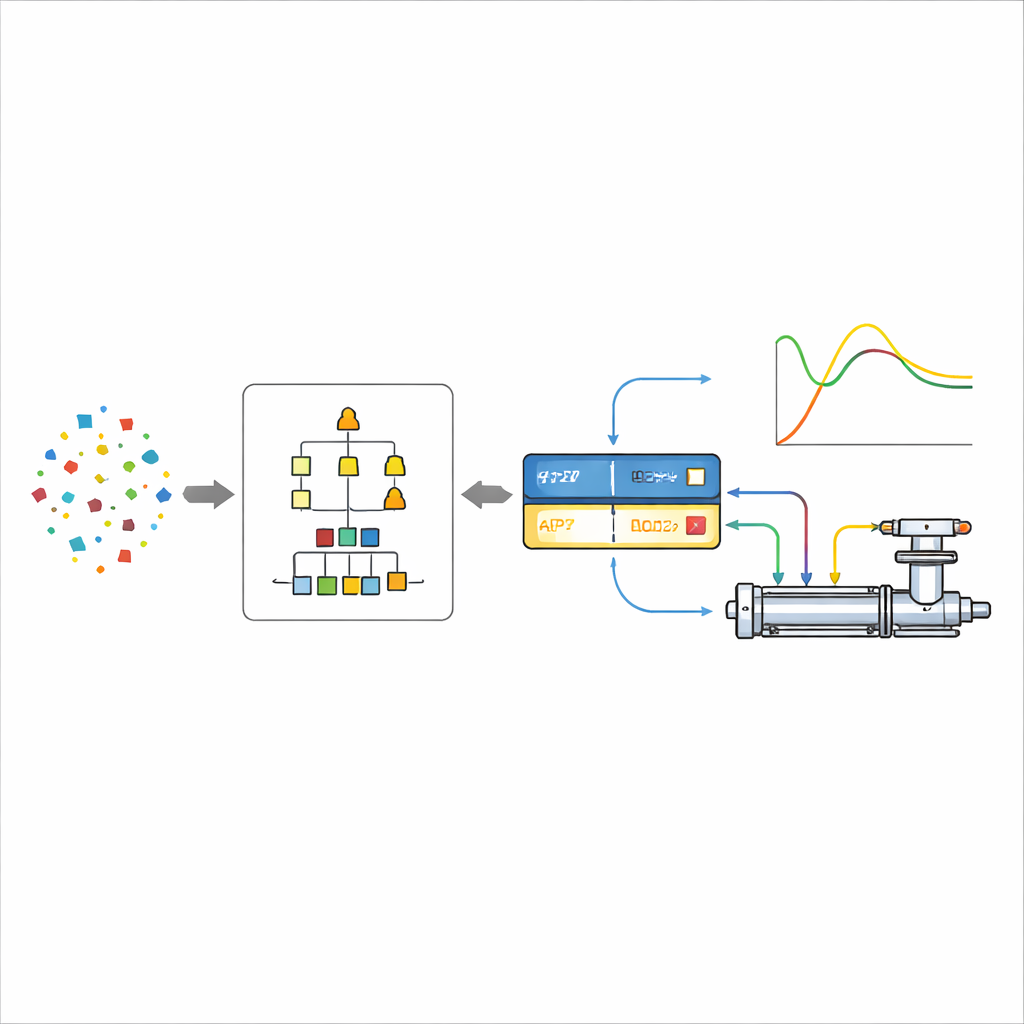
Diseñar a mano un controlador difuso así requeriría adivinar un gran número de parámetros, desde las formas de las funciones de pertenencia hasta las ganancias de escalado. En lugar de eso, los autores permiten que un algoritmo evolutivo busque automáticamente buenas configuraciones. Introducen un método de evolución diferencial con restricciones mejorado llamado ICBNDE, que trata cada controlador posible como un individuo en una población. Grupos de estos individuos se mutan y recombinan, con reglas especiales que favorecen soluciones que tanto rinden bien como cumplen límites de ingeniería, como tiempo de asentamiento y precisión en estado estacionario. El algoritmo usa una estrategia ingeniosa de "mejor y más cercano" para guiar la búsqueda y un paso de refinamiento codicioso cuando el progreso se estanca, evitando los delicados factores de penalización que requieren muchos métodos de optimización.
Qué tan bien funciona el nuevo enfoque
Primero, el equipo prueba su método de optimización por sí solo en un conjunto estándar de problemas matemáticos de referencia usados internacionalmente para evaluar algoritmos con restricciones. ICBNDE encuentra de forma consistente respuestas factibles y cercanas al óptimo y muestra gran fiabilidad en ejecuciones repetidas, a menudo igualando o superando métodos clásicos. Luego lo aplican al objetivo real: ajustar el controlador PID difuso para su cilindro hidráulico y, para comparación, sintonizar un PID convencional en las mismas condiciones. En pruebas de seguimiento de estilo frecuencial, donde el cilindro sigue objetivos sinusoidales cambiantes, el controlador difuso optimizado produce errores de posición significativamente menores que el mejor PID. Las pruebas de escalón, donde el objetivo salta entre diferentes posiciones, muestran que el controlador difuso generalmente alcanza un error en estado estacionario menor, especialmente para recorridos mayores, mientras que el PID a veces se asienta ligeramente más rápido. Finalmente, frente a varios otros esquemas de optimización avanzados, ICBNDE ofrece diseños de controlador más consistentes, con mejor rendimiento mediano y medio y menos variación entre ejecuciones.
Qué significa esto para los robots del futuro
En términos sencillos, el estudio muestra que combinar un controlador "difuso" con un afinador evolutivo inteligente puede hacer que las articulaciones hidráulicas de los robots sean más precisas y robustas que los métodos tradicionales, sin requerir que un experto en control diseñe a mano cada parámetro. El PID difuso maneja de forma natural el comportamiento desordenado y asimétrico de cilindros reales, mientras que el algoritmo ICBNDE explora de manera fiable el complejo espacio de diseño y respeta límites prácticos sobre velocidad y precisión. Aunque aún hay margen para acelerar la optimización y refinar el algoritmo, este trabajo apunta hacia un futuro en el que robots humanoides de alta potencia puedan moverse con la suavidad y la fiabilidad necesarias para tareas exigentes en el mundo real.
Cita: Chen, X., Dong, H., Shen, C. et al. Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm. Sci Rep 16, 10426 (2026). https://doi.org/10.1038/s41598-026-41203-0
Palabras clave: hidráulica de robots humanoides, control PID difuso, evolución diferencial, sistemas de servomando no lineales, algoritmos de optimización