Clear Sky Science · pt
Otimização de controlador PID fuzzy de tipo-2 intervalar com um algoritmo diferencial de evolução restrito melhorado
Músculo Mais Inteligente para Corpos Robóticos
Robôs humanoides que caminham, saltam e carregam cargas pesadas frequentemente dependem de “músculos” hidráulicos porque eles podem concentrar muito mais potência em um espaço pequeno do que motores elétricos. Mas fazer esses sistemas hidráulicos moverem-se de forma suave e precisa é notoriamente difícil: seu comportamento é não linear, sensível e difícil de prever. Este artigo apresenta uma nova forma de ajustar automaticamente um controlador avançado para que as juntas hidráulicas de um robô humanoide fiquem mais precisas, mais estáveis e mais fáceis de projetar.
Por que Juntas Hidráulicas São Difíceis de Controlar
Atuadores hidráulicos podem gerar forças enormes por meio de cilindros compactos acionados por óleo pressurizado. O robô humanoide estudado aqui usa uma unidade hidráulica móvel com bombas, válvulas, acumuladores e radiadores para alimentar vários cilindros nas pernas. Embora esse hardware forneça muita potência, os cilindros respondem de maneira diferente ao estender e retrair, e seu comportamento muda com a pressão, o fluxo e a carga. Esquemas de controle simples, como o familiar controlador proporcional–integral–derivativo (PID), assumem dinâmicas mais lineares e previsíveis, portanto têm dificuldade em manter a posição do cilindro exatamente no alvo sem ultrapassagem ou oscilações. Para aproveitar ao máximo esses atuadores potentes, os autores argumentam que a lógica de controle deve ser capaz de lidar diretamente com incerteza e não linearidade.
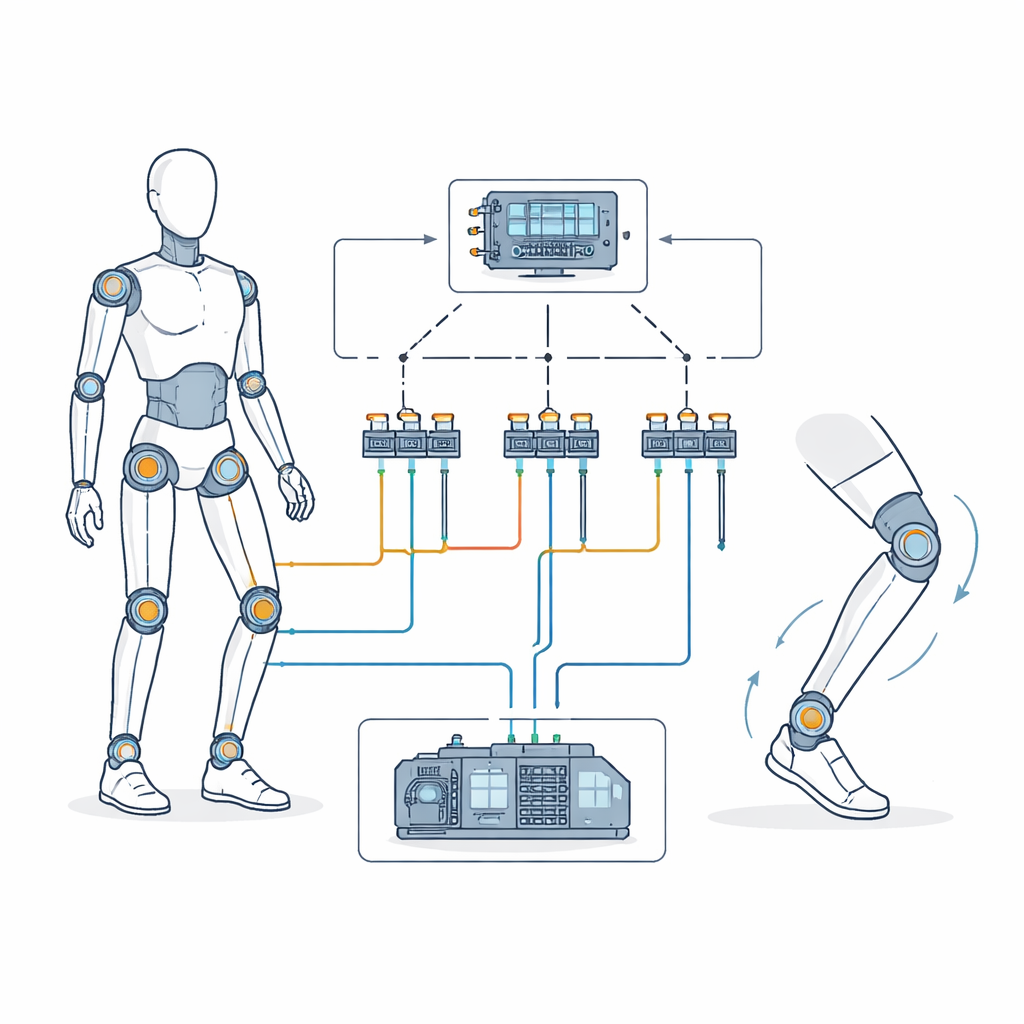
Adicionando Raciocínio Fuzzy ao Controlador
Para enfrentar essas peculiaridades, os pesquisadores constroem um controlador PID fuzzy de tipo‑2 intervalar. Em essência, a lógica fuzzy permite que o controlador use regras que soam mais como raciocínio humano — por exemplo, “se o erro de posição é pequeno mas está mudando rapidamente, reduza a ação” — e conjuntos fuzzy de tipo‑2 intervalar vão um passo adiante ao modelar explicitamente a incerteza nessas regras. A equipe primeiro desenvolve um modelo matemático detalhado do cilindro hidráulico e de sua eletrônica, incluindo sensores, válvulas servo e cargas usadas nas articulações do tornozelo e do joelho do robô. Em seguida, eles incorporam a lógica fuzzy em torno da estrutura PID habitual, com entradas que descrevem o erro de posição e sua taxa de variação, e saídas que ajustam o esforço de controle. Para manter o projeto prático, simplificam as formas de saída do controlador ao mesmo tempo em que permitem comportamento não linear rico por meio das regras fuzzy de entrada.
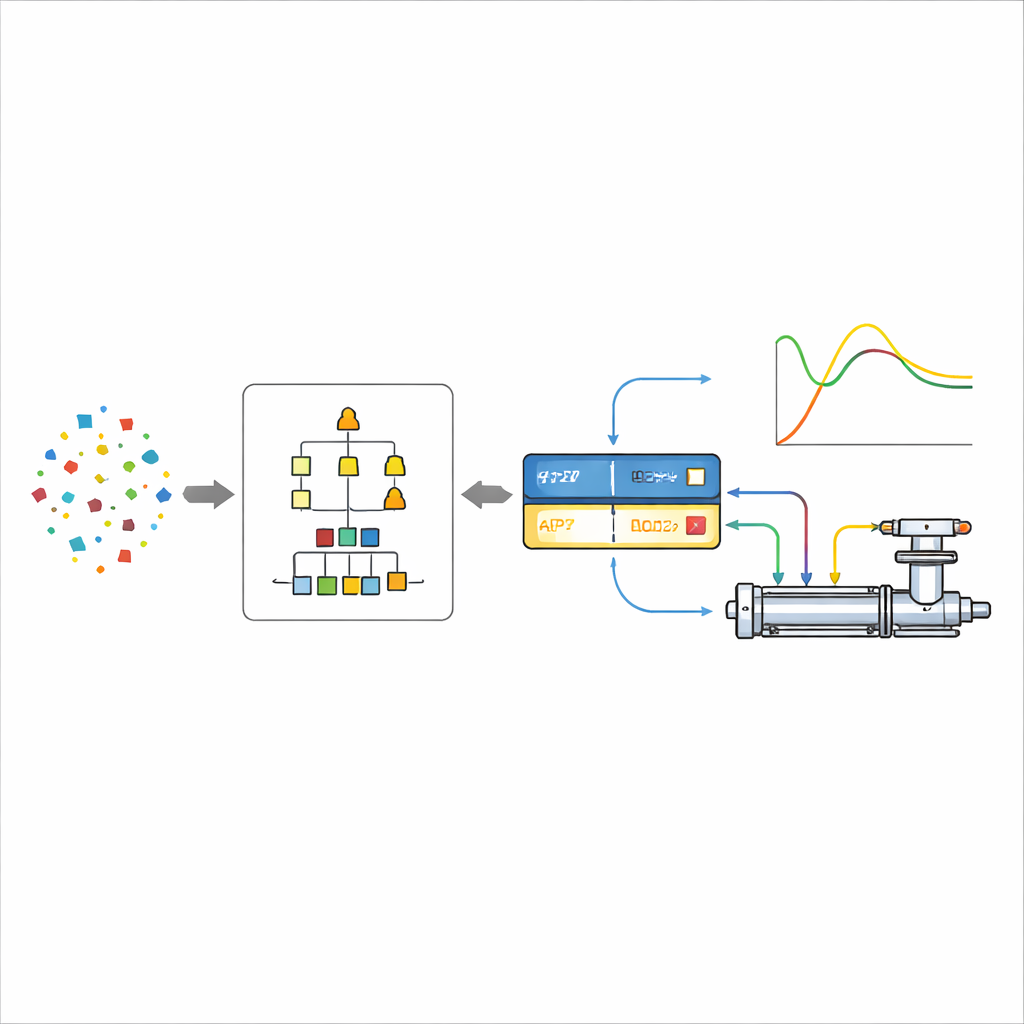
Deixando um Algoritmo Evolutivo Fazer o Ajuste
Projetar manualmente esse tipo de controlador fuzzy exigiria chutar um grande número de parâmetros, desde as formas das funções de pertinência até os ganhos de escala. Em vez disso, os autores deixam um algoritmo evolutivo buscar automaticamente boas configurações. Eles apresentam um método diferencial de evolução com restrições melhorado chamado ICBNDE, que trata cada controlador possível como um indivíduo em uma população. Grupos desses indivíduos são mutados e recombinados, com regras especiais que favorecem soluções que tanto têm bom desempenho quanto obedecem limites de engenharia, como tempo de acomodação e precisão em regime permanente. O algoritmo usa uma estratégia esperta de “melhor e mais próximo” para guiar a busca e um passo de refinamento guloso quando o progresso estagna, evitando os fatores de penalização delicados que muitos métodos de otimização exigem.
Quão Bem a Nova Abordagem Funciona
Primeiro, a equipe testa seu método de otimização isoladamente em um conjunto padrão de problemas matemáticos de referência usados globalmente para avaliar algoritmos com restrições. O ICBNDE consistentemente encontra respostas viáveis e quase ótimas e mostra forte confiabilidade em execuções repetidas, muitas vezes igualando ou superando métodos clássicos. Em seguida, eles o aplicam ao alvo real: ajustar o controlador PID fuzzy para seu cilindro hidráulico e, para comparação, ajustar um PID convencional nas mesmas condições. Em testes de rastreamento no estilo frequência, nos quais o cilindro segue alvos senoidais variáveis, o controlador fuzzy otimizado produz erros de posição significativamente menores do que o melhor PID. Testes em degrau, nos quais o alvo salta entre posições diferentes, mostram que o controlador fuzzy geralmente alcança menor erro em regime permanente, especialmente para cursos maiores, enquanto o PID às vezes se acomoda um pouco mais rápido. Finalmente, quando comparado a vários outros esquemas avançados de otimização, o ICBNDE entrega projetos de controlador mais consistentes, com melhor desempenho mediano e médio e menos variação entre execuções.
O Que Isso Significa para Robôs Futuros
Em termos simples, o estudo mostra que combinar um controlador “fuzzy” com um afinador evolutivo inteligente pode tornar as juntas hidráulicas de robôs mais precisas e robustas do que métodos tradicionais, sem exigir que um especialista em controle ajuste manualmente cada parâmetro. O PID fuzzy lida de forma natural com o comportamento confuso e assimétrico de cilindros reais, enquanto o algoritmo ICBNDE busca com confiabilidade o espaço complexo de projeto e respeita limites práticos de velocidade e precisão. Embora ainda haja espaço para acelerar a otimização e refinar o algoritmo, este trabalho aponta para um futuro em que robôs humanoides de alta potência podem se mover com a suavidade e a confiabilidade necessárias para tarefas exigentes no mundo real.
Citação: Chen, X., Dong, H., Shen, C. et al. Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm. Sci Rep 16, 10426 (2026). https://doi.org/10.1038/s41598-026-41203-0
Palavras-chave: hidráulica de robôs humanoides, controle PID fuzzy, evolução diferencial, sistemas servo não lineares, algoritmos de otimização