Clear Sky Science · tr
İyileştirilmiş kısıtlı diferansiyel evrim algoritması ile aralıklı tip-2 bulanık mantık PID kontrolörünün optimizasyonu
Robot Gövdeleri İçin Daha Akıllı Kas
Yürüyen, zıplayan ve ağır yükler taşıyan insansı robotlar genellikle elektrik motorlarına kıyasla küçük hacme daha fazla güç sığdırabildikleri için hidrolik “kaslara” dayanır. Ancak bu hidrolik sistemleri düzgün ve hassas şekilde hareket ettirmek ünlü şekilde zordur: davranışları doğrusal değildir, hassastır ve öngörülmesi zordur. Bu makale, bir insansı robottaki hidrolik eklemlerin daha doğru, daha kararlı ve tasarımı daha kolay hale gelmesi için gelişmiş bir kontrolörü otomatik olarak ayarlamanın yeni bir yolunu sunuyor.
Hidrolik Eklemlerin Kontrol Edilmesinin Zor Olmasının Nedenleri
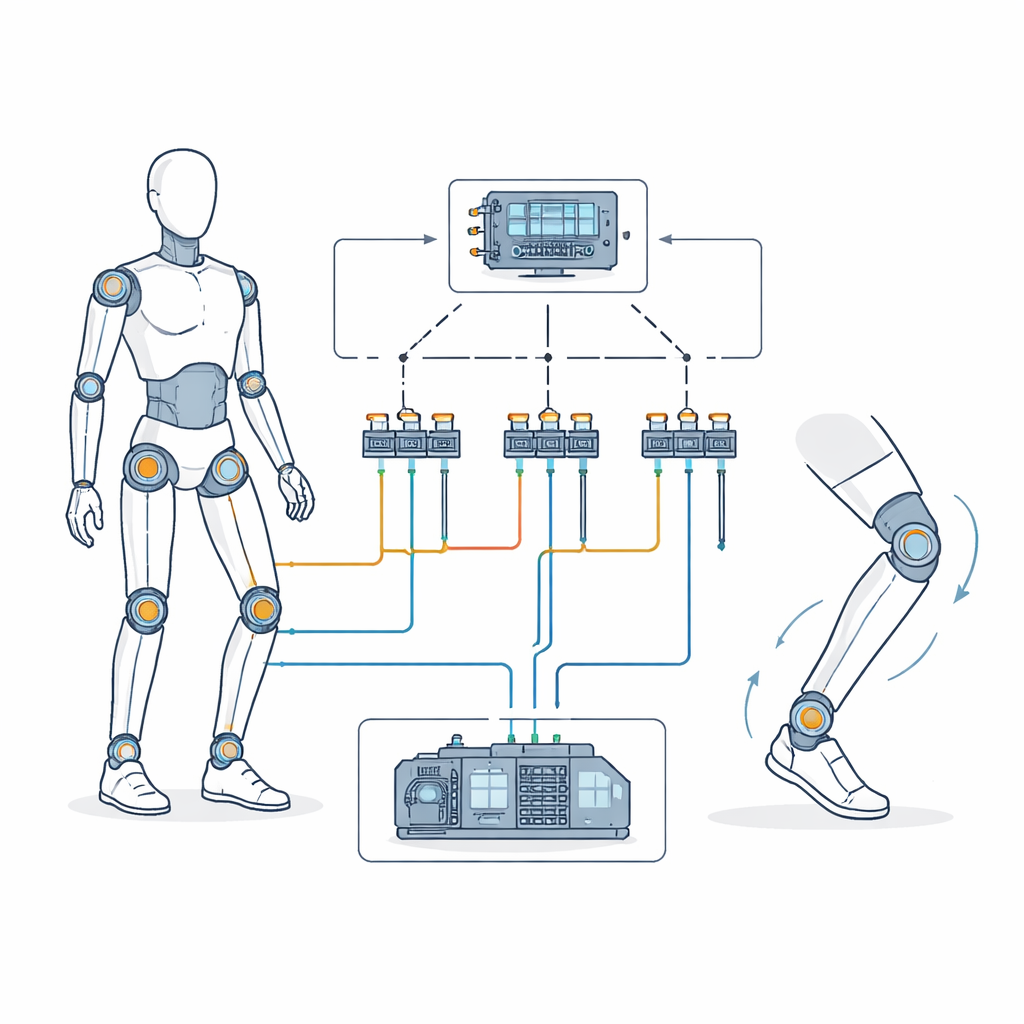
Hidrolik aktüatörler, basınçlı yağla çalışan kompakt silindirler aracılığıyla büyük kuvvetler sağlayabilir. Burada incelenen insansı robot, bacaklardaki birkaç silindire besleme yapan pompalar, valfler, akümülatörler ve soğutuculardan oluşan mobil bir hidrolik güç ünitesi kullanır. Bu donanım bol güç sağlasa da, silindirler uzama ve geri çekilme sırasında farklı tepki verir ve davranışları basınç, akış ve yüke bağlı olarak değişir. Alışılmış oransal–integral–türev (PID) gibi basit kontrol şemaları daha doğrusal ve öngörülebilir dinamikler varsaydığından, silindirin konumunu aşım veya salınım olmadan hedefte tutmakta zorlanır. Yazarlar, bu güçlü aktüatörlerden en iyi verimi almak için kontrol mantığının belirsizlik ve doğrusal olmayanlığı doğrudan ele alabilmesi gerektiğini savunuyor.
Kontrolöre Bulanık Düşünceyi Eklemek
Bu tuhaflıklarla başa çıkmak için araştırmacılar aralıklı tip‑2 bulanık mantık PID kontrolörü inşa ediyorlar. Özünde bulanık mantık, kontrolörün insan muhakemesine daha yakın kurallar kullanmasına izin verir — örneğin “pozisyon hatası küçük ama hızla değişiyorsa gücü azalt” gibi — ve aralıklı tip‑2 bulanık kümeler bu kurallardaki belirsizliği açıkça modelleyerek bir adım daha ileri gider. Ekip önce robotun ayak bileği ve diz eklemlerinde kullanılan sensörler, servo valfler ve yükler dahil olmak üzere hidrolik silindir ve elektroniğinin ayrıntılı bir matematiksel modelini geliştirir. Daha sonra bulanık mantığı geleneksel PID yapısının etrafına yerleştirir; girdiler pozisyon hatası ve bunun değişim hızı hakkında bilgi verirken, çıktılar kontrol çabasını ayarlar. Tasarımı pratik tutmak için kontrolörün çıktı şekilleri basitleştirilir, ancak bulanık giriş kuralları aracılığıyla zengin doğrusal olmayan davranışa izin verilmeye devam edilir.
Ayarlamayı Evrimsel Bir Algoritmaya Bırakmak
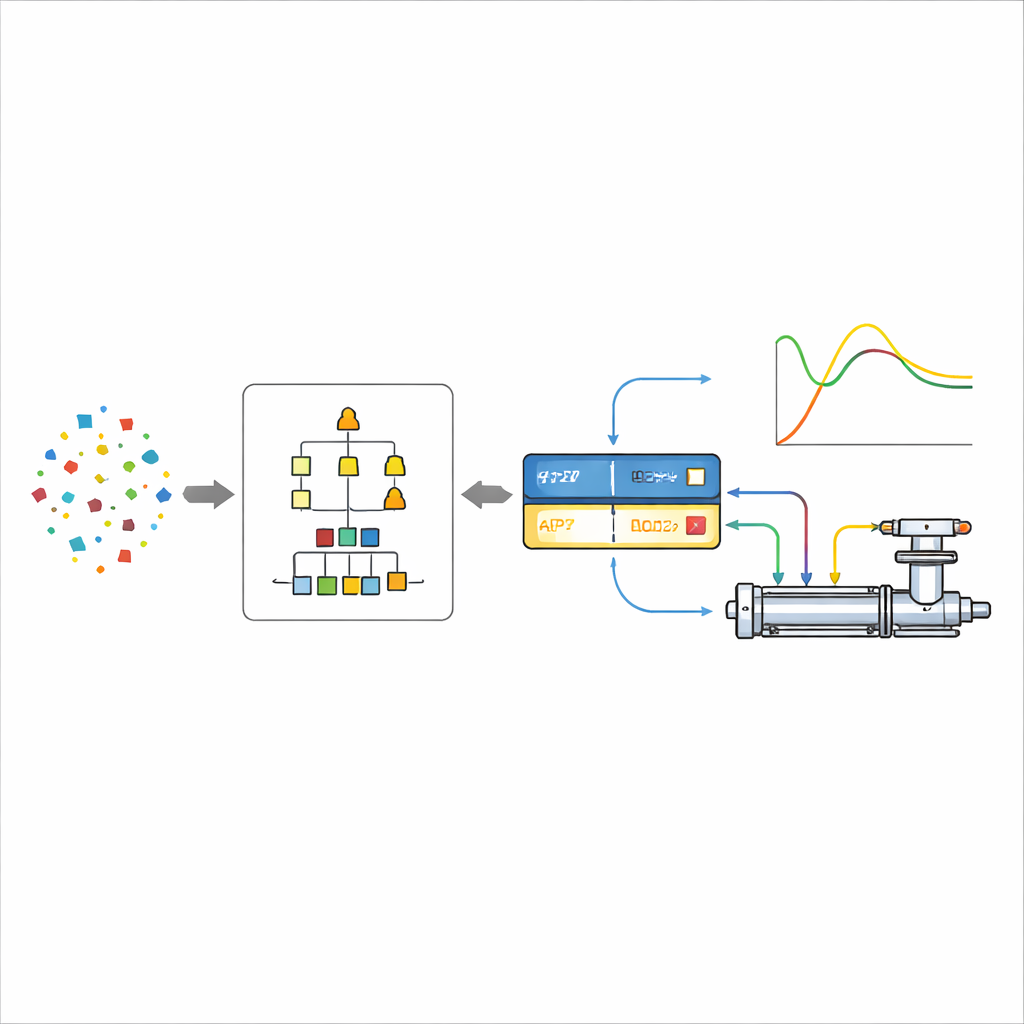
Böyle bir bulanık kontrolörü el ile tasarlamak, üyelik fonksiyonlarının şekillerinden ölçekleme kazançlarına kadar çok sayıda parametrenin tahmin edilmesini gerektirir. Bunun yerine yazarlar, iyi ayarları otomatik olarak araması için bir evrimsel algoritmaya izin verir. Her olası kontrolörü bir popülasyondaki birey olarak ele alan ICBNDE adlı geliştirilmiş kısıtlı diferansiyel evrim yöntemini tanıtıyorlar. Bu birey grupları mutasyona uğratılır ve yeniden kombine edilir; yerleşim süresi ve kararlı durum doğruluğu gibi mühendislik sınırlarına uyan ve iyi performans gösteren çözümleri teşvik eden özel kurallar uygulanır. Algoritma aramayı yönlendirmek için akıllıca bir “daha iyi ve en yakın” stratejisi kullanır ve ilerleme durduğunda açgözlü bir iyileştirme adımıyla ceza faktörlerinin hassas ayarına gerek kalmadan aramayı sürdürür.
Yeni Yaklaşım Ne Kadar İyi Çalışıyor
Önce ekip, optimizasyon yöntemlerini dünya çapında kısıtlı algoritmaları değerlendirmek için kullanılan standart matematiksel kıyas problemleri üzerinde tek başına test eder. ICBNDE tutarlı şekilde uygulanabilir, optimuma yakın çözümler bulur ve tekrarlı çalışmalarda güçlü güvenilirlik gösterir; sıklıkla klasik yöntemlerle eşleşir veya onları geride bırakır. Daha sonra gerçek hedefe uygularlar: hidrolik silindir için bulanık PID kontrolörünü ayarlamak ve karşılaştırma için aynı koşullar altında geleneksel bir PID’i de ayarlarlar. Silindirin değişen sinüzoidal hedefleri takip ettiği frekans tarzı izleme testlerinde, optimize edilmiş bulanık kontrolör en iyi PID’den önemli ölçüde daha küçük konum hataları üretir. Hedefin farklı pozisyonlar arasında atladığı step testlerinde, bulanık kontrolör genelde özellikle daha büyük stroklar için daha düşük kararlı durum hatası sağlar; PID bazen biraz daha hızlı karara bağlanır. Son olarak, birkaç diğer gelişmiş optimizasyon şemasıyla karşılaştırıldığında ICBNDE daha tutarlı kontrolör tasarımları sunar; medyan ve ortalama performans daha iyi ve çalışmalar arasındaki varyasyon daha düşüktür.
Bu, Geleceğin Robotları İçin Ne Anlama Geliyor
Sade bir dille, çalışma gösteriyor ki “bulanık” bir kontrolörü akıllı bir evrimsel ayarlayıcıyla birleştirmek, hidrolik robot eklemlerini geleneksel yöntemlere göre daha hassas ve dayanıklı hale getirebilir; üstelik her parametreyi bir kontrol uzmanının tek tek elle ayarlamasını gerektirmez. Bulanık PID gerçek silindirlerin düzensiz, asimetrik davranışıyla doğal olarak başa çıkarken, ICBNDE algoritması karmaşık tasarım uzayını güvenilir şekilde arar ve hız ile doğruluk üzerindeki pratik sınırlara saygı gösterir. Optimizasyonu hızlandırmak ve algoritmayı daha da rafine etmek için hâlâ alan olsa da, bu çalışma yüksek güçlü insansı robotların zorlu gerçek dünya görevleri için gereken akıcılık ve güvenilirlikle hareket edebileceği bir geleceğe işaret ediyor.
Atıf: Chen, X., Dong, H., Shen, C. et al. Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm. Sci Rep 16, 10426 (2026). https://doi.org/10.1038/s41598-026-41203-0
Anahtar kelimeler: insansı robot hidrolikleri, bulanık PID kontrolü, diferansiyel evrim, doğrusal olmayan servo sistemler, optimizasyon algoritmaları