Clear Sky Science · nl
Optimalisatie van een interval type-2 fuzzy PID-regelaar met een verbeterd constrained differential evolution-algoritme
Slimmere spieren voor robotlichamen
Humanoïde robots die lopen, springen en zware lasten tillen vertrouwen vaak op hydraulische "spieren" omdat die veel meer vermogen in een kleine ruimte kunnen stoppen dan elektromotoren. Het soepel en nauwkeurig laten bewegen van deze hydraulische systemen is echter berucht lastig: hun gedrag is niet-lineair, gevoelig en moeilijk te voorspellen. Dit artikel introduceert een nieuwe manier om een geavanceerde regelaar automatisch af te stemmen, zodat hydraulische gewrichten in een humanoïde robot nauwkeuriger, stabieler en makkelijker te ontwerpen worden.
Waarom hydraulische gewrichten moeilijk te regelen zijn
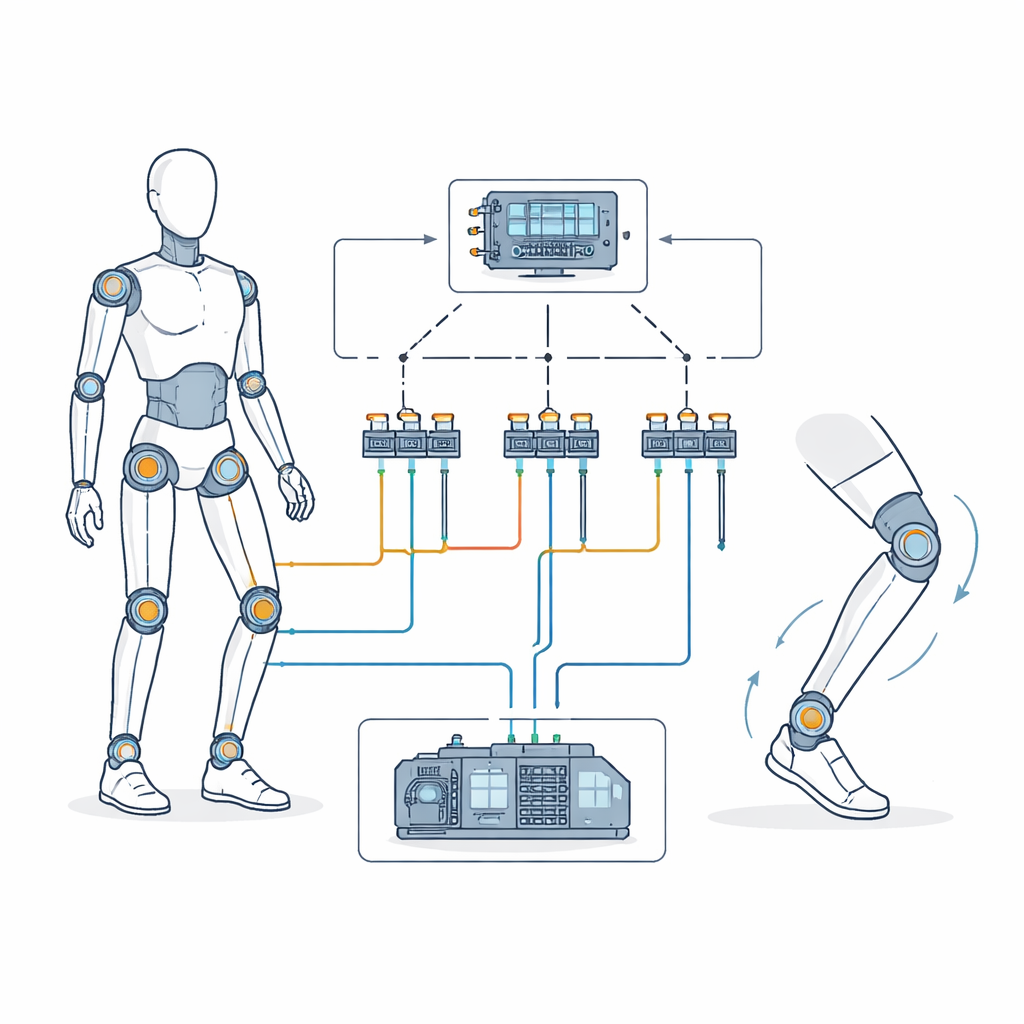
Hydraulische actuatorën kunnen enorme krachten leveren via compacte cilinders die door persolie worden aangestuurd. De bestudeerde humanoïde robot gebruikt een mobiele hydraulische krachtbron met pompen, kleppen, accumulators en koeling om meerdere cilinders in de benen te voeden. Hoewel deze hardware veel vermogen levert, reageren de cilinders anders bij uitschuiven en inhouden, en verandert hun gedrag met druk, debiet en belasting. Eenvoudige regelingen, zoals de bekende proportioneel–integraal–derivaat (PID)-regelaar, veronderstellen meer lineaire en voorspelbare dynamiek, waardoor ze moeite hebben de positie van de cilinder strak op doel te houden zonder overshoot of oscillatie. Om het maximale uit deze krachtige actuatorën te halen, stellen de auteurs dat de regelstrategie onzekerheid en niet-lineariteit direct moet kunnen verwerken.
Fuzzy-denken toevoegen aan de regelaar
Om deze eigenaardigheden aan te pakken, bouwen de onderzoekers een interval type‑2 fuzzy logic PID-regelaar. In wezen maakt fuzzy logica het mogelijk regels te gebruiken die meer op menselijk redeneren lijken — zoals "als de positiefout klein is maar snel verandert, terugnemen" — en interval type‑2 fuzzy sets gaan een stap verder door expliciet onzekerheid in die regels te modelleren. Het team ontwikkelt eerst een gedetailleerd wiskundig model van de hydraulische cilinder en de bijbehorende elektronica, inclusief sensoren, servokleppen en belastingen die in de enkel- en kniegewrichten van de robot worden gebruikt. Vervolgens bouwen ze de fuzzy-logica rond de gebruikelijke PID-structuur, met ingangen die de positiefout en de snelheidsverandering ervan beschrijven, en uitgangen die de regelinspanning aanpassen. Om het ontwerp praktisch te houden, vereenvoudigen ze de vorm van de controlleruitgangen terwijl ze toch rijke niet-lineaire gedragspatronen mogelijk maken via de fuzzy-ingangsregels.
Een evolutionair algoritme laten afstemmen
Het ontwerpen van zo’n fuzzy-regelaar met de hand zou veel parameterschattingen vereisen, van de vormen van lidmaatschapsfuncties tot schaalfactoren. In plaats daarvan laten de auteurs een evolutionair algoritme automatisch naar goede instellingen zoeken. Ze introduceren een verbeterde constrained differential evolution-methode genaamd ICBNDE, die elke mogelijke regelaar als een individu in een populatie behandelt. Groepen van deze individuen worden gemuteerd en gerecombineerd, met speciale regels die oplossingen bevoordelen die zowel goed presteren als voldoen aan technische grenzen zoals inssettijd en stationaire nauwkeurigheid. Het algoritme gebruikt een slimme "better and nearest"-strategie om de zoekrichting te sturen en een gretige verfijningsstap wanneer de voortgang stagneert, waardoor de gevoelige penalty-factoren die veel optimalisatiemethoden vereisen worden vermeden.
Hoe goed de nieuwe aanpak werkt
Allereerst test het team hun optimalisatiemethode zelfstandig op een standaardset wiskundige benchmarkproblemen die wereldwijd gebruikt worden om constrained algoritmen te beoordelen. ICBNDE vindt consequent haalbare, bijna‑optimale oplossingen en toont sterke betrouwbaarheid over herhaalde runs, vaak gelijk aan of beter dan klassieke methoden. Daarna passen ze het toe op het echte doel: het afstemmen van de fuzzy PID-regelaar voor hun hydraulische cilinder, en ter vergelijking het afstemmen van een conventionele PID onder dezelfde omstandigheden. In frequentie-achtige volgbaarheidstests, waarbij de cilinder veranderende sinusvormige doelwaarden volgt, levert de geoptimaliseerde fuzzy-regelaar beduidend kleinere positiefouten op dan de beste PID. Stapresponstests, waarbij het doel tussen verschillende posities springt, laten zien dat de fuzzy-regelaar algemeen lagere stationaire fouten bereikt, vooral bij grotere slagen, terwijl de PID soms iets sneller uitschommelt naar stilstand. Ten slotte, vergeleken met meerdere andere geavanceerde optimalisatieschema’s, levert ICBNDE consistentere regelaarontwerpen met betere mediaan- en gemiddelde prestaties en minder variatie tussen runs.
Wat dit betekent voor toekomstige robots
In eenvoudige termen toont de studie aan dat het combineren van een "fuzzy" regelaar met een slimme evolutionaire tuner hydraulische robotgewrichten nauwkeuriger en robuuster kan maken dan traditionele methoden, zonder dat een regeltechnisch expert elke parameter handmatig hoeft uit te werken. De fuzzy PID gaat op natuurlijke wijze om met het rommelige, asymmetrische gedrag van echte cilinders, terwijl het ICBNDE-algoritme betrouwbaar de complexe ontwerpruimte doorzoekt en praktische grenzen aan snelheid en nauwkeurigheid respecteert. Hoewel er nog ruimte is om de optimalisatie te versnellen en het algoritme verder te verfijnen, wijst dit werk op een toekomst waarin compacte, krachtige humanoïde robots kunnen bewegen met de soepelheid en betrouwbaarheid die nodig zijn voor veeleisende toepassingen in de echte wereld.
Bronvermelding: Chen, X., Dong, H., Shen, C. et al. Optimizing interval type-2 fuzzy logic PID controller with an improved constraint differential evolution algorithm. Sci Rep 16, 10426 (2026). https://doi.org/10.1038/s41598-026-41203-0
Trefwoorden: hydrauliek voor humanoïde robots, fuzzy PID-regeling, differentiële evolutie, niet-lineaire servosystemen, optimalisatie-algoritmen