Clear Sky Science · zh
集成 AI 的仿生指尖电子皮肤,用于湿滑环境中的高精度滑动检测
为滑溜的日常生活带来智能触觉
任何曾经摔落过一只湿杯或难以握住油腻厨具的人都知道,滑腻的物体有多棘手。人类通常靠指尖的惊人灵敏度应对这种情况——在物体即将滑落之前,指尖会感知到微小的振动。本研究描述了一种人造指尖“皮肤”,赋予机器人和义手类似精细的触觉,即便在物体被水或油覆盖时也能工作,为厨房、工厂、医院和家庭中的更安全、更灵活的机器打开了大门。
为什么机器人需要更好的滑动感知
现代电子皮肤已经能让机器感知压力、温度,甚至湿度。但可靠地感知物体即将滑落,尤其是在湿润或油腻条件下,仍是一个主要盲点。对于在现实环境中准备食物、清洗工具或处理精细物品的机器人来说,这是一个严重限制:握持必须足够稳固以防止物体掉落,又要足够温和以免压坏或损伤物品。作者们着手构建一种可穿戴的指尖传感器,能够在任何表面条件下——干燥、被水润湿或被油覆盖时——检测滑动起始,同时保持柔性、轻便且成本低廉,便于广泛应用。

以指纹为设计蓝图
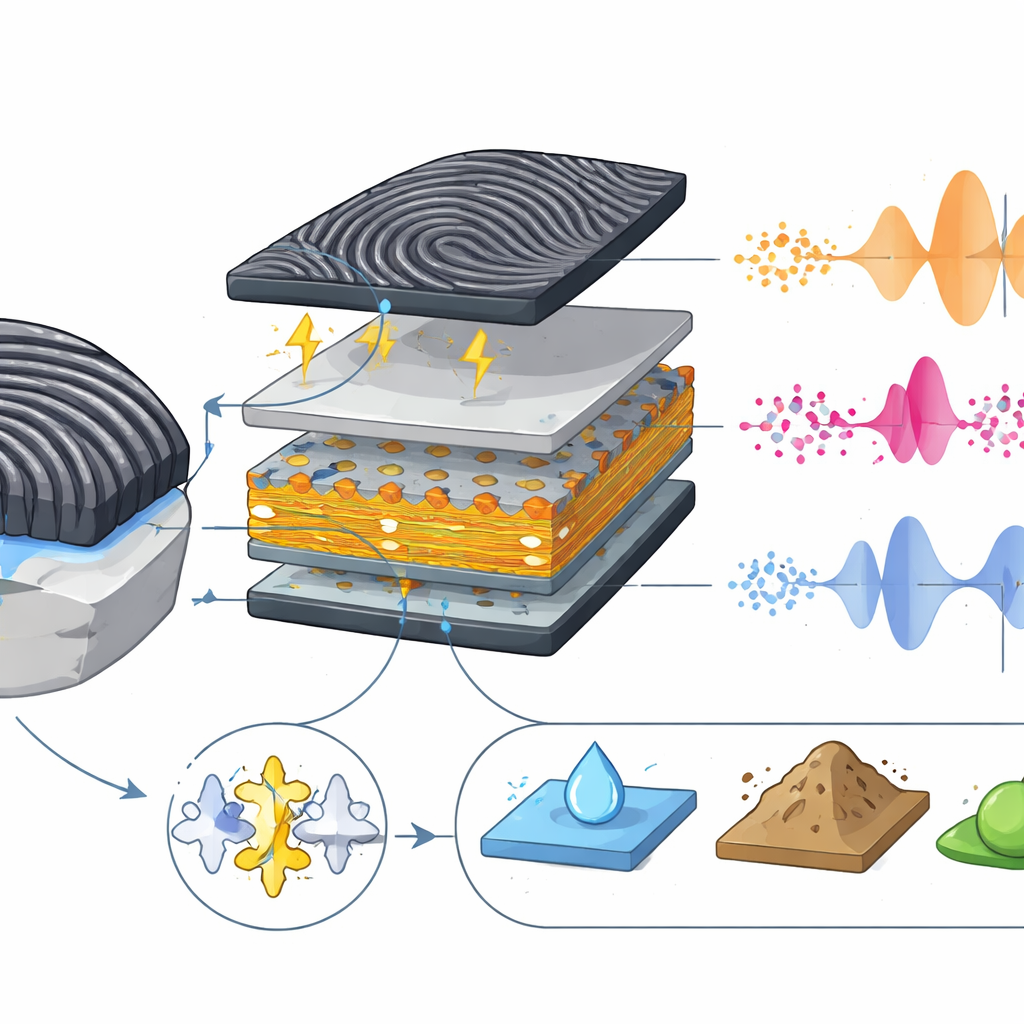
团队直接借鉴了人类指尖的构造,指纹脊线有助于调节振动在皮肤中的传播。他们采用全丝网印刷方法制作了多层电子薄膜,这种工艺适合低成本、大批量生产。器件的核心是一层薄薄的特殊塑料,弯曲或振动时会产生电荷。在其上方,他们加入了一层软橡胶,其表面用二氧化碳激光雕刻出随机的、类似指纹的纹理。当这种带纹理的表面在另一种材料上滑动时,脊线会反复粘附和释放,产生微小的振动突发,内部的感测层将这些振动转换为电压信号。
把微弱信号放大并保证耐用
为确保这些振动信号足够强且可靠,研究人员在活性塑料中混入少量碳纳米管——纳米尺度的碳管。这一细微改动改善了该层分子的排列方式,提升了其在运动时产生电荷的能力。他们还微调了印刷过程中的加热步骤,使材料结晶为最敏感的形态。测试表明,该传感器产生了相对较大且稳定的电信号,并且在数千次弯曲循环后性能仍能保持,这是用于活动手指或机器人夹持器时非常重要的特性。
在水和油中感知滑动
真正的考验是指尖能否在湿润表面上感知滑动。将传感器安装在人造指上,在三种条件下将其沿不锈钢板拉动:完全干燥、覆盖水层以及涂有油。在每种情况下,指纹脊线都产生了与经典“粘-滑”现象有关的规则、波状电压模式,该现象发生在表面交替抓牢与释放时。关键是,即便油降低了摩擦力,有纹理的传感器仍产生清晰、强烈的信号,而在相同条件下结构相同但表面光滑的传感器则大多失效。那些沟槽像通道一样将液体推开,恢复足够接触以产生可用振动。该器件还在滑过陶瓷、玻璃和织物等材料时捕捉到信号中的细微差异,暗示它不仅能检测滑动,还可能识别表面类型。
教 AI 识别指尖感知到的内容
由于传感器输出的是丰富的数据流,研究人员将其与机器学习软件配对,使系统能够自动识别所接触的表面类型。他们从每个滑动信号中提取简单的数值特征——例如波动的强度和速度——并训练模型在干燥、被水润湿和被油润湿的条件下区分不锈钢、陶瓷、玻璃或无纺布。通过交叉验证等方法避免过拟合,系统在每种设置下都正确标注了超过95%的测试样本,且在混合所有条件时几乎对所有样本都判别准确。在最终演示中,传感器作为电子皮肤贴附在一只软体机器人手上,抓取黄瓜、土豆和胡萝卜等日常食物。即便这些物体涂了油,该系统仍能通过分析特征振动模式实时跟踪滑动。
从人造指尖到数字触觉
简而言之,这项工作表明,模仿人类指纹的结构并将其与智能材料和 AI 结合,可以赋予机器类似人类的能力去感知物体即将滑落——无论是干燥、潮湿还是油腻。由于该传感器可印刷、可弯曲并能包裹在手指或夹具上,它非常适合未来的义肢、协作机器人以及其他需要处理易碎、凌乱或不可预测物体的设备。随着越来越多的这些触觉信号被转换为数字数据并自动分析,我们的物理触觉有可能在网络空间被镜像,从而支持一个机器人与人类更安全、无缝互动的未来,应对周围这个滑溜的世界。}
引用: Adachi, T., Ozawa, K., Kamanoi, S. et al. AI-integrated bionic fingertip E-Skin for precision slippage detection in wet environments. Sci Rep 16, 14179 (2026). https://doi.org/10.1038/s41598-026-41096-z
关键词: 电子皮肤, 机器人触觉, 滑动检测, 软体机器人, 触觉传感