Clear Sky Science · he
קצה אצבע ביוניקי משולב בינה מלאכותית לעור אלקטרוני לזיהוי החלקה מדויק בסביבות רטובות
מגע חכם לחיי היומיום החלקים
כל מי שהפיל כוס רטובה או נאבק בהחזקת כלי בישול שמן יודע כמה חפצים חלקים יכולים להיות בעייתיים. בני אדם בדרך כלל מתמודדים בזכות הרגישות יוצאת הדופן של קצות האצבעות, שמרגישות רעידות זעירות רגע לפני שמשהו מחליק. המחקר הזה מתאר "עור" מלאכותי לקצה אצבע שמעניק לרובוטים ולידי תותבות חוש מישוש מתוחכם דומה — גם כאשר חפצים מצופים במים או בשמן — ופותח אפשרויות למכונות בטוחות וזריזות יותר במטבחים, במפעלים, בבתי חולים ובבתים פרטיים.
למה רובוטים זקוקים לחוש החלקה טוב יותר
עורות אלקטרוניים מודרניים כבר מאפשרים למכונות להרגיש לחץ, טמפרטורה ואפילו לחות. אבל חישה אמינה של רגע ההחלקה — במיוחד בתנאים רטובים או שומניים — נשארה נקודת עיוורון משמעותית. עבור רובוטים שמכינים אוכל, שוטפים כלים או מטפלים בפריטים עדינים במציאות, זו מגבלה חמורה: אחיזה בטוחה חייבת להיות דחוסה מספיק כדי למנוע נפילה אך עדינה מספיק כדי לא squash או לפגוע בחפץ. החוקרים ביקשו לבנות חיישן ללביש לקצה אצבע שיכול לזהות את תחילת ההחלקה בכל מצב משטח — יבש, רטוב במים או מצופה שמן — בזמן שהוא גמיש, קל ומשתלם לייצור בהיקף רחב.

טביעות אצבע כמתווה עיצובי
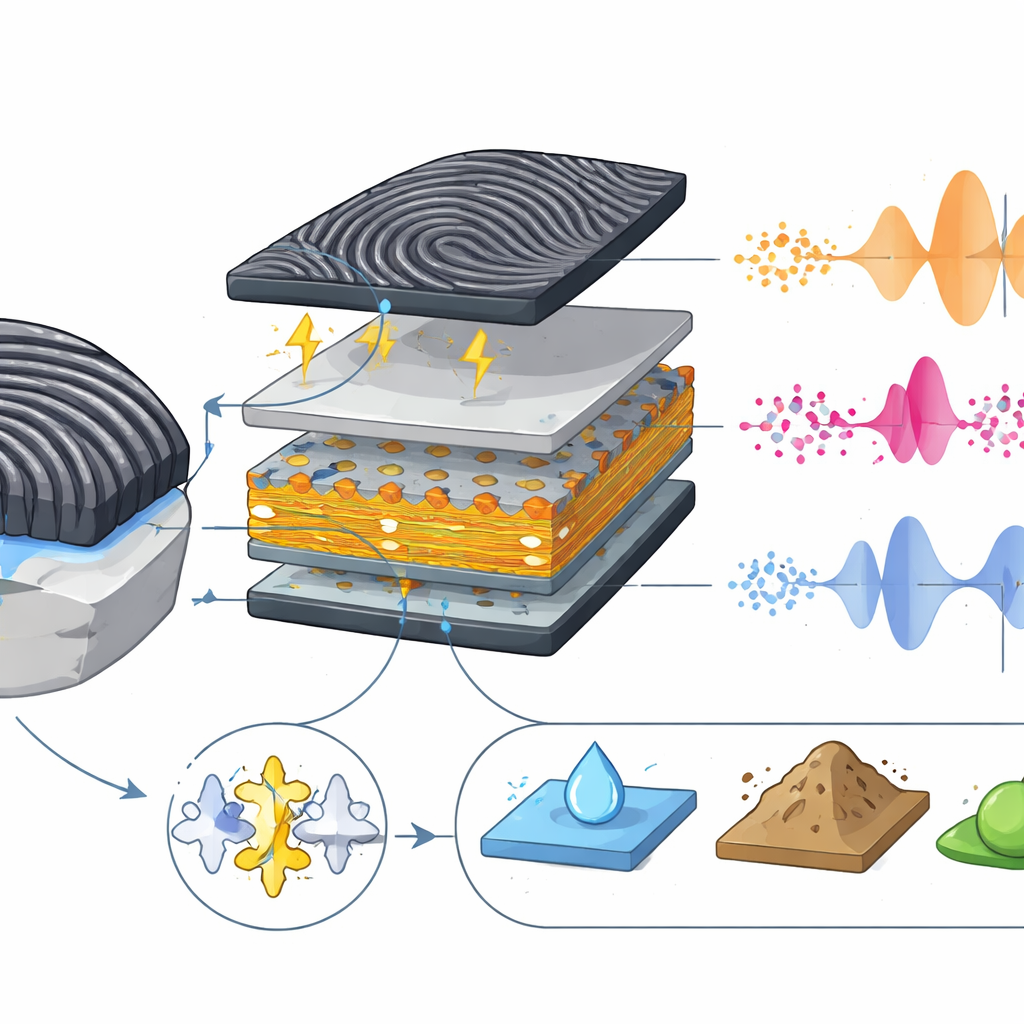
הצוות שאב השראה ישירה מקצה האצבע האנושי, שבו הטבעות של טביעות האצבע מסייעות לכוונן כיצד רעידות עוברות דרך העור. הם ייצרו סרט אלקטרוני רב-שכבתי באמצעות שיטות הדפסה מסך כולן, טכניקה שמתאימה היטב לייצור זול ובהיקף. ליבת המכשיר היא שכבה דקה של פלסטיק מיוחד שמייצר מטענים חשמליים כשנמתח או רועד. מעליה הוסיפו שכבת גומי רכה שהשטח שלה נחרת בדוגמה אקראית הדומה לטביעת אצבע באמצעות לייזר פחמן דו-חמצני. כאשר משטח זה המחורץ מחליק על חומר אחר, החריצים נדבקים ומשתחררים לסירוגין, ויוצרים פרצי רעידה זעירים ששכבת החישה הפנימית ממירה לאותות מתח.
להפוך אות זעיר לחזק ועמיד
כדי להבטיח שהאותות מהרעידות יהיו חזקים ואמינים, החוקרים ערבבו כמות קטנה של צינורות ננו-פחם — צינורות פחמן בקנה מידה ננומטרי — לתוך הפלסטיק הפעיל. שינוי עדין זה שיפר את היישור של המולקולות בשכבה, והגביר את היכולת שלה לייצר מטען בתנועה. הם גם כיוונו במדויק את שלבי החימום בתהליך ההדפסה כדי שהחומר יתקרמל בצורה המגיבה ביותר. בדיקות הראו שהחיישן ייצר אותות חשמליים יחסית גדולים ויציבים, וביצועיו נשמרו גם אחרי אלפי מחזורי כיפוף — תכונה חשובה למכשיר המיועד להיות לביש על אצבעות נעות או על מלקטים רובוטיים.
להרגיש החלקה במים ובשמן
המבחן האמיתי היה האם קצה האצבע יכול לחוש החלקה על משטחים רטובים. כשהוא מותקן על אצבע מלאכותית, החיישן נשאב לאורך לוח פלדת אל-חלד בשלושה מצבים: יבש לגמרי, מכוסה מים ומצופה שמן. בכל מקרה, החריצים של טביעת האצבע ייצרו דפוסי מתח סדירים בגלים הקשורים להתנהגות ה"הדבק-החלק" הקלאסית שמתרחשת כאשר משטח אוחז ומשחרר לסירוגין. מה שחשוב הוא שהחיישן המחורץ הפיק אותות ברורים וחזקים אפילו כשהשמן הפחית את החיכוך, בעוד שחיישן זהה וחלק נכשל ברוב המקרים בתנאים אלה. החריצים פעלו כמו תעלות שדחפו את הנוזל הצידה והשיבו מגע מספיק כדי ליצור רעידות שימושיות. המכשיר גם תפס הבדלים עדינים באותות בעת החלקה על חומרים כגון קרמיקה, זכוכית ובד לא ארוג, מרמז על היכולת שלו לזהות לא רק החלקה אלא גם סוג משטח.
ללמד בינה מלאכותית לזהות מה קצה האצבע מרגיש
מכיוון שהחיישן מפיק זרמי נתונים עשירים, החוקרים שילבו אותו עם תוכנת למידת מכונה שיכולה לזהות באופן אוטומטי איזה סוג משטח הוא נוגע בו. הם חילצו תכונות מספריות פשוטות מכל אות החלקה — כמו כמה חזק וכמה מהיר הוא מתנדנד — ולאחר מכן אימנו מודל להבחין בין פלדת אל-חלד לכרמיקה, זכוכית או בד לא ארוג בתנאים יבשים, רטובים במים וברטובים בשמן. באמצעות שיטות בדיקה צולבות כדי למנוע התאמת יתר, המערכת סיווגה נכון יותר מ-95 אחוז ממקרי המבחן בכל מצב, וכמעט את כל הדגימות כשכל התנאים היו מעורבים יחד. בהדגמה סופית הותקן החיישן כעור אלקטרוני ליד רובוטית רכה שלחצה מזונות יומיומיים כגון מלפפונים, תפוחי אדמה וגזרים. גם כשהחפצים האלה היו משומנים, המערכת עדיין יכלה לעקוב בזמן אמת אחר החלקה על ידי ניתוח דפוסי הרעידות המאפיינים.
מקצות אצבע מלאכותיות למגע דיגיטלי
במילים פשוטות, עבודה זו מראה שלהעתיק את מבנה טביעות האצבע האנושיות ולשלב אותו עם חומרים חכמים ובינה מלאכותית יכול להעניק למכונות חוש דמוי-אנושי מפתיע של רגעי ההחלקה — יבש, רטוב או שומני. היות שהחיישן ניתן להדפסה, ניתן לכיפוף ולעטיפה סביב אצבעות או מלקטים, הוא מתאים היטב לידיים תותבות עתידיות, רובוטים משתפי פעולה ומכשירים אחרים שצריכים לטפל בפריטים שבירים, מלוכלכים או לא צפויים. ככל שיותר אותות מישוש אלה יהפכו לנתונים דיגיטליים וינותחו אוטומטית, חוש המישוש הגופני שלנו עשוי להשתקף במרחב הסייבר, ותמוך בעתיד שבו רובוטים ובני אדם יתקשרו בצורה בטוחה וחלקה יותר עם העולם החלק סביבם.
ציטוט: Adachi, T., Ozawa, K., Kamanoi, S. et al. AI-integrated bionic fingertip E-Skin for precision slippage detection in wet environments. Sci Rep 16, 14179 (2026). https://doi.org/10.1038/s41598-026-41096-z
מילות מפתח: עור אלקטרוני, מגע רובוטי, זיהוי החלקה, רובוטיקה רכה, חישת מישוש