Clear Sky Science · pl
Biotytaniczny, zintegrowany z AI opuszek palca E-Skin do precyzyjnego wykrywania poślizgu w wilgotnym środowisku
Inteligentny dotyk na śliskie sytuacje codzienne
Każdy, kto upuścił mokry szklankę albo miał trudności z trzymaniem tłustego narzędzia kuchennego, wie, jak kłopotliwe potrafią być śliskie przedmioty. Ludzie zazwyczaj sobie z tym radzą dzięki niesamowitej czułości opuszków palców, które wyczuwają mikrowibracje tuż przed tym, jak coś zaczyna się ślizgać. W tym badaniu opisano sztuczną „skórę” opuszków palców, która daje robotom i protezom podobnie wyrafinowane zmysły dotyku — nawet gdy przedmioty pokryte są wodą lub olejem — otwierając drogę do bezpieczniejszych i bardziej zwinnych maszyn w kuchniach, fabrykach, szpitalach i domach.
Dlaczego roboty potrzebują lepszego wykrywania poślizgu
Nowoczesne elektroniczne skóry już pozwalają maszynom wyczuwać nacisk, temperaturę, a nawet wilgotność. Jednak niezawodne wykrywanie momentu, kiedy obiekt zaczyna się ślizgać, zwłaszcza w warunkach wilgotnych lub tłustych, pozostaje poważną luką. Dla robotów przygotowujących jedzenie, myjących narzędzia czy manipulujących delikatnymi przedmiotami w rzeczywistym świecie to istotne ograniczenie: pewny chwyt musi być na tyle mocny, by zapobiec upuszczeniu przedmiotu, a jednocześnie na tyle delikatny, by go nie zmiażdżyć ani nie uszkodzić. Autorzy postawili sobie za cel stworzenie noszalnego czujnika opuszków, który wykryje początek poślizgu na każdej powierzchni — suchej, mokrej wodą czy pokrytej olejem — przy zachowaniu elastyczności, niskiej wagi i przystępnej ceny do szerokiego zastosowania.

Odciski palców jako plan projektowy
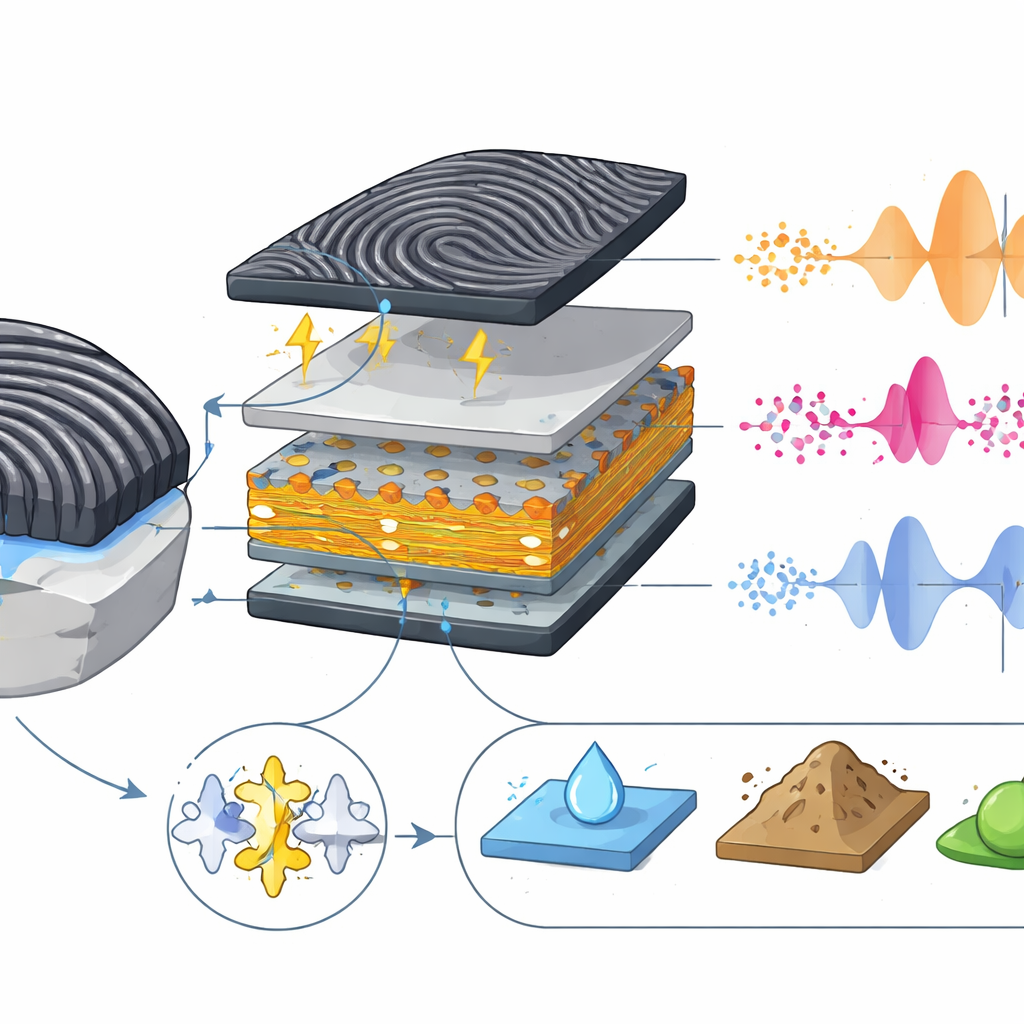
Zespół czerpał bezpośrednią inspirację z ludzkiego opuszek palca, którego rowki odcisków palców wpływają na sposób, w jaki drgania rozchodzą się przez skórę. Wykonali wielowarstwową folię elektroniczną przy użyciu metod pełnego sitodruku — techniki dobrze nadającej się do niskokosztowej produkcji masowej. Rdzeń urządzenia stanowi cienka warstwa specjalnego tworzywa, które generuje ładunki elektryczne przy zginaniu lub drganiu. Na to nałożono miękką warstwę gumy, której powierzchnię wyrzeźbiono w losowy wzór przypominający odciski palców za pomocą lasera CO2. Gdy taka wzorzysta powierzchnia przesuwa się po innym materiale, grzbiety wielokrotnie przyklejają się i odrywają, tworząc krótkie wybuchy drgań, które wewnętrzna warstwa czujnikowa zamienia na sygnały napięciowe.
Wzmocnienie małego sygnału i zapewnienie trwałości
Aby upewnić się, że te sygnały drgań będą silne i niezawodne, badacze domieszali do aktywnego tworzywa niewielką ilość nanorurek węglowych — nanometrowych rur z węgla. Ta subtelna modyfikacja poprawiła uporządkowanie cząsteczek w warstwie, zwiększając jej zdolność do generowania ładunku podczas ruchu. Dopracowali także etapy nagrzewania stosowane podczas drukowania, tak aby materiał krystalizował w najbardziej reaktywną formę. Testy wykazały, że czujnik generował stosunkowo duże i stabilne sygnały elektryczne, a jego wydajność utrzymywała się nawet po tysiącach cykli zginania — istotna cecha dla urządzenia noszonego na poruszających się palcach lub chwytakach robotycznych.
Wyczuwanie poślizgu w wodzie i oleju
Prawdziwym sprawdzianem było, czy opuszek potrafi wykryć poślizg na mokrych powierzchniach. Zamontowany na sztucznym palcu czujnik przesuwano po stalowej płycie w trzech warunkach: całkowicie sucha, pokryta wodą i pokryta olejem. W każdym przypadku rowki odcisków generowały regularne, falowe wzorce napięciowe związane z klasycznym zachowaniem „stick–slip”, które pojawia się, gdy powierzchnia na przemian chwyta i puszcza. Co kluczowe, wzorzysty czujnik dawał wyraźne, silne sygnały nawet gdy olej obniżał tarcie, podczas gdy identyczny, ale gładki czujnik w tych warunkach zasadniczo zawodził. Rowki działały jak kanały odprowadzające ciecz i przywracające wystarczający kontakt do wygenerowania użytecznych drgań. Urządzenie rejestrowało też subtelne różnice sygnałów przy przesuwaniu po materiałach takich jak ceramika, szkło czy tkanina włóknista, co sugeruje zdolność rozpoznawania nie tylko poślizgu, lecz także typu powierzchni.
Nauczanie AI rozpoznawania tego, co czuje opuszek
Ponieważ czujnik generuje bogate strumienie danych, badacze sparowali go z oprogramowaniem uczącym się, które mogło automatycznie identyfikować rodzaj dotykanej powierzchni. Z każdego sygnału poślizgu wyciągali proste cechy liczbowe — na przykład jak silnie i jak szybko się wahał — i trenowali model, aby odróżniał stal nierdzewną od ceramiki, szkła czy włókniny w warunkach suchych, zwilżonych wodą i pokrytych olejem. Stosując metody krzyżowej weryfikacji, aby uniknąć przeuczenia, system poprawnie oznaczył ponad 95 procent przypadków testowych w każdym ustawieniu, i niemal wszystkie próbki przy mieszanych warunkach. W ostatnim pokazie czujnik umieszczono jako elektroniczną skórę na miękkiej robocie-ręce, która chwytała codzienne produkty spożywcze, takie jak ogórki, ziemniaki i marchewki. Nawet gdy te obiekty były nasmarowane olejem, system potrafił w czasie rzeczywistym śledzić poślizg analizując charakterystyczne wzorce drgań.
Od sztucznych opuszków do cyfrowego dotyku
Mówiąc prosto, praca ta pokazuje, że skopiowanie struktury ludzkich odcisków palców i połączenie jej z inteligentnymi materiałami oraz AI może dać maszynom zaskakująco ludzki zmysł wyczuwania, kiedy coś zaczyna się ślizgać — czy to na sucho, czy na mokro, czy na oleju. Ponieważ czujnik można drukować, zginać i owijac wokół palców lub chwytaków, nadaje się do przyszłych protez rąk, robotów współpracujących i innych urządzeń, które muszą obchodzić się z delikatnymi, brudnymi lub nieprzewidywalnymi przedmiotami. W miarę jak coraz więcej tych sygnałów dotykowych będzie przetwarzanych na dane cyfrowe i analizowanych automatycznie, nasz fizyczny zmysł dotyku może zostać odzwierciedlony w cyberprzestrzeni, wspierając przyszłość, w której roboty i ludzie współdziałają bezpieczniej i płynniej ze śliskim światem wokół nas.
Cytowanie: Adachi, T., Ozawa, K., Kamanoi, S. et al. AI-integrated bionic fingertip E-Skin for precision slippage detection in wet environments. Sci Rep 16, 14179 (2026). https://doi.org/10.1038/s41598-026-41096-z
Słowa kluczowe: elektroniczna skóra, robotyczny dotyk, wykrywanie poślizgu, miękka robotyka, czucie dotykowe