Clear Sky Science · fr
Doigt bionique à peau électronique intégrant l'IA pour la détection précise de glissement en environnements humides
Un toucher intelligent pour la vie quotidienne glissante
Quiconque a laissé tomber un verre mouillé ou a eu du mal à tenir un ustensile de cuisine gras sait à quel point les objets glissants peuvent être délicats. Les humains s’en tirent généralement grâce à l’incroyable sensibilité de nos bouts des doigts, qui détectent de minuscules vibrations juste avant qu’un objet ne glisse. Cette étude décrit une « peau » de bout de doigt artificielle qui offre aux robots et aux mains prothétiques un sens du toucher tout aussi fin — même lorsque les objets sont recouverts d’eau ou d’huile — ouvrant la voie à des machines plus sûres et plus agiles dans les cuisines, les usines, les hôpitaux et les foyers.
Pourquoi les robots ont besoin d’un meilleur sens du glissement
Les peaux électroniques modernes permettent déjà aux machines de percevoir la pression, la température et même l’humidité. Mais détecter de façon fiable quand un objet est sur le point de glisser, en particulier dans des conditions humides ou grasses, reste un point aveugle important. Pour les robots qui préparent des aliments, lavent des outils ou manipulent des objets délicats dans le monde réel, c’est une limitation sérieuse : une prise sûre doit être suffisamment ferme pour éviter de laisser tomber un objet, tout en restant assez douce pour ne pas l’écraser ou l’endommager. Les auteurs se sont donné pour objectif de concevoir un capteur de bout de doigt portable capable de détecter le début du glissement dans toutes les conditions de surface — sèche, humide d’eau ou huilée — tout en étant flexible, léger et peu coûteux pour un usage large.

Les empreintes digitales comme plan de conception
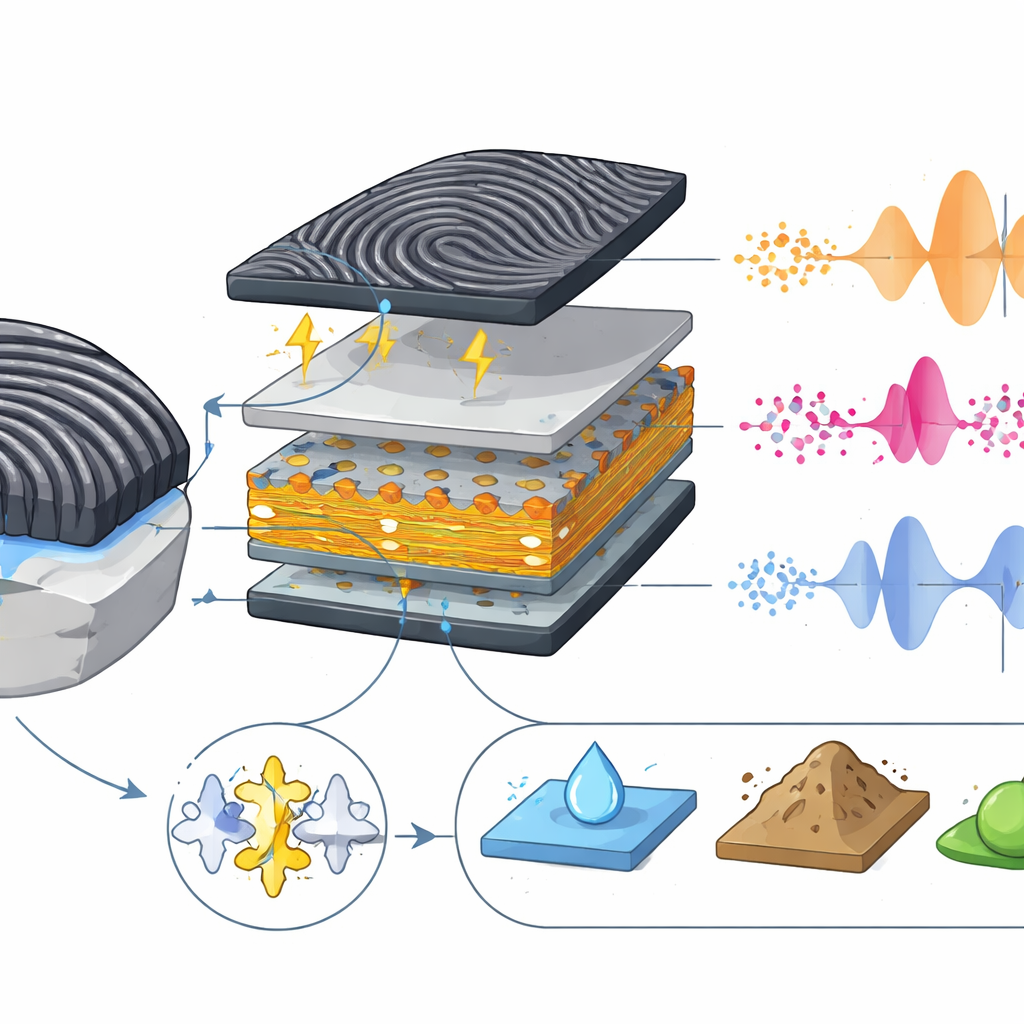
L’équipe s’est directement inspirée du bout du doigt humain, dont les crêtes des empreintes digitales contribuent à régler la propagation des vibrations dans la peau. Ils ont fabriqué un film électronique multicouche en utilisant des méthodes d’impression par écran total, une technique bien adaptée à la production de masse à faible coût. Le cœur du dispositif est une fine couche d’un plastique spécial qui génère des charges électriques lorsqu’il est plié ou vibré. Au‑dessus, ils ont ajouté une couche de caoutchouc souple dont la surface a été gravée d’un motif aléatoire semblable à une empreinte digitale à l’aide d’un laser au dioxyde de carbone. Lorsque cette surface rainurée glisse sur un autre matériau, les crêtes adhèrent et se détachent à répétition, créant de petites impulsions vibratoires que la couche sensible interne convertit en signaux de tension.
Rendre un signal minuscule fort et durable
Pour garantir que ces signaux vibratoires soient puissants et fiables, les chercheurs ont mélangé une petite quantité de nanotubes de carbone — des tubes de carbone à l’échelle nanométrique — dans le plastique actif. Ce changement subtil a amélioré l’alignement des molécules dans la couche, renforçant sa capacité à générer des charges lorsqu’elle est mise en mouvement. Ils ont également affiné les étapes de chauffage utilisées pendant l’impression afin que le matériau cristallise sous sa forme la plus réactive. Les essais ont montré que le capteur produisait des signaux électriques relativement importants et stables, et que ses performances restaient élevées même après des milliers de cycles de flexion, une caractéristique importante pour un dispositif destiné à être porté sur des doigts mobiles ou des pinces robotiques.
Détecter le glissement dans l’eau et l’huile
Le véritable test était de savoir si le bout de doigt pouvait sentir le glissement sur des surfaces humides. Monté sur un doigt artificiel, le capteur a été tiré sur une plaque en acier inoxydable dans trois conditions : complètement sèche, couverte d’eau et enduite d’huile. Dans chaque cas, les crêtes d’empreinte ont généré des motifs de tension réguliers, en forme d’onde, liés au comportement classique de « stick–slip » qui se produit lorsqu’une surface adhère puis se relâche alternativement. De manière cruciale, le capteur texturé produisait des signaux clairs et puissants même lorsque l’huile réduisait la friction, tandis qu’un capteur autrement identique mais lisse échouait en grande partie dans les mêmes conditions. Les rainures ont joué le rôle de canaux repoussant le liquide et restaurant suffisamment de contact pour produire des vibrations exploitables. L’appareil a également capté des différences subtiles dans les signaux lors du glissement sur des matériaux tels que la céramique, le verre et le tissu, suggérant sa capacité à reconnaître non seulement le glissement, mais aussi le type de surface.
Apprendre à l’IA à reconnaître ce que ressent le bout du doigt
Parce que le capteur génère des flux de données riches, les chercheurs l’ont couplé à un logiciel d’apprentissage automatique capable d’identifier automatiquement le type de surface touchée. Ils ont extrait des caractéristiques numériques simples de chaque signal de glissement — comme l’intensité et la vitesse de fluctuation — et entraîné un modèle pour distinguer l’acier inoxydable de la céramique, du verre ou du tissu non tissé dans des conditions sèches, humides d’eau et humides d’huile. En utilisant des méthodes de validation croisée pour éviter le surapprentissage, le système a correctement étiqueté plus de 95 % des cas de test dans chaque configuration, et presque tous les échantillons lorsque toutes les conditions étaient mélangées. Dans une démonstration finale, le capteur a été posé comme peau électronique sur une main robotique souple qui saisissait des aliments courants tels que concombres, pommes de terre et carottes. Même lorsque ces objets étaient huilés, le système pouvait encore suivre le glissement en temps réel en analysant les motifs vibratoires caractéristiques.
Des bouts de doigts artificiels au toucher numérique
En termes simples, ce travail montre que copier la structure des empreintes digitales humaines et la combiner avec des matériaux intelligents et de l’IA peut doter les machines d’un sens du glissement remarquablement proche de celui des humains — qu’il soit sec, humide ou huilé. Parce que le capteur peut être imprimé, plié et enroulé autour de doigts ou de pinces, il est bien adapté aux futures mains prothétiques, robots collaboratifs et autres dispositifs qui doivent manipuler des objets fragiles, sales ou imprévisibles. À mesure que ces signaux tactiles seront convertis en données numériques et analysés automatiquement, notre sens physique du toucher pourrait être reproduit dans le cyberespace, favorisant un avenir dans lequel robots et humains interagissent de façon plus sûre et fluide avec le monde glissant qui nous entoure.
Citation: Adachi, T., Ozawa, K., Kamanoi, S. et al. AI-integrated bionic fingertip E-Skin for precision slippage detection in wet environments. Sci Rep 16, 14179 (2026). https://doi.org/10.1038/s41598-026-41096-z
Mots-clés: peau électronique, toucher robotique, détection de glissement, robotique souple, détection tactile