Clear Sky Science · ja
湿潤環境での精密な滑り検出のためのAI統合バイオニック指先E-スキン
滑りやすい日常に備えるスマートな触覚
濡れたグラスを落としたり、油で滑る調理器具をうまく握れなかったりした経験がある人は、滑りやすい物体がいかに扱いにくいかを知っています。人間は指先の驚くべき感度のおかげで、物が滑り落ちる直前の微小な振動を感じ取って対処できます。本研究は、ロボットや義手に同様の洗練された触覚を与える人工の指先「皮膚」を紹介します。水や油で被われた物体に対しても機能し、キッチン、工場、病院、家庭でのより安全で機敏な機械の実現につながります。
なぜロボットにより良い滑り感知が必要か
現代の電子皮膚はすでに圧力や温度、湿度さえ感知できます。しかし、特に濡れた状態や油で覆われた状態といった条件下で、物体が滑り始める瞬間を確実に検知することは依然として大きな課題です。食品を扱ったり、器具を洗ったり、現実世界で繊細な物を扱うロボットにとってこれは深刻な制約になります。確実な把持は物体を落とさない十分な力がいる一方で、押しつぶしたり傷つけたりしないだけの優しさも必要です。著者らは、乾燥、流水、油膜いずれの表面状態でも滑りの始まりを検出でき、かつ柔軟で軽く、広く使えるほど安価な装着式指先センサーの開発を目指しました。

設計の青写真としての指紋
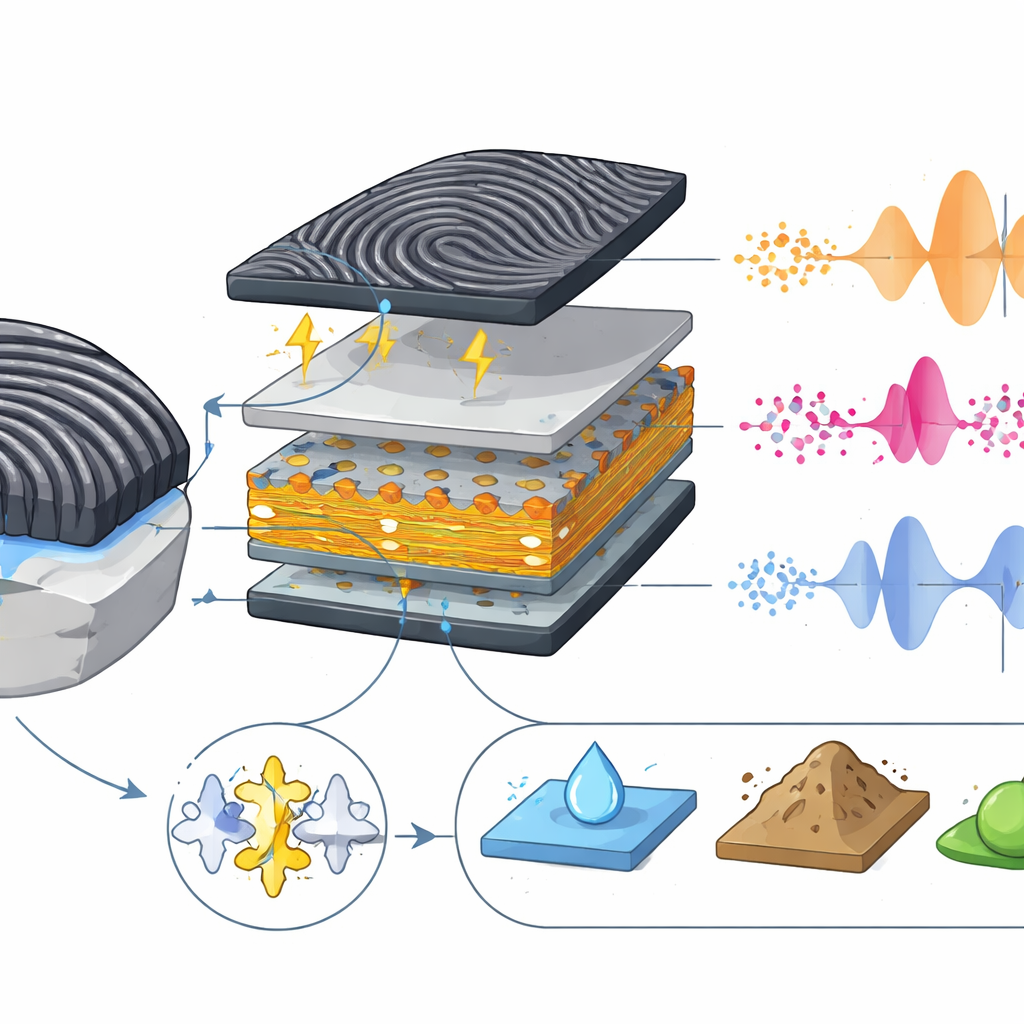
研究チームは人間の指先に直接インスピレーションを得ました。指紋の隆起は皮膚内の振動の伝わり方を調節するのに役立ちます。彼らは全スクリーン印刷方式で多層の電子フィルムを製作しました。この手法は低コストで大量生産に適しています。デバイスの核は、曲げや振動で電荷を発生する特殊な薄いプラスチック層です。その上に、表面を二酸化炭素レーザーでランダムな指紋のような模様に彫った柔らかいゴム層を載せました。この模様付き表面が別の材料上を滑ると、隆起が繰り返し付着・離脱を起こし、内側のセンサー層が電圧信号に変換する微小な振動パルスを生み出します。
微弱な信号を大きく、耐久性を持たせる
これらの振動信号を強く安定させるために、研究者たちは活性プラスチックに少量のカーボンナノチューブ(ナノメートルスケールの炭素チューブ)を混ぜました。この微妙な改良により層内の分子配列が整いやすくなり、動かされたときに電荷を生み出す能力が高まりました。さらに、印刷時の加熱工程を微調整して材料が最も応答性の高い結晶構造をとるようにしました。テストではセンサーが比較的大きく安定した電気信号を生成し、何千回もの曲げサイクル後でも性能が維持されることが示されました。これは指やロボットのグリッパーに装着されるデバイスとして重要な特徴です。
水中や油上で滑りを感じる
本当の試練は、湿った表面で指先が滑りを感知できるかどうかでした。人工指に装着したセンサーをステンレス鋼板の上で、完全に乾いた状態、水で濡れた状態、油で被覆された状態の3条件で引きました。いずれの場合も指紋状の隆起が「スティック–スリップ」挙動に対応する規則的な波状の電圧パターンを生み出しました。重要なのは、模様付きセンサーが摩擦が低下した油の下でも明瞭で強い信号を出したのに対し、同等だが平滑なセンサーは同条件でほぼ機能しなかったことです。溝は液体を押しのけるチャネルのように働き、十分な接触を回復して利用可能な振動を生成しました。さらに、センサーはセラミック、ガラス、繊維などの材料上で滑る際に信号に現れる微妙な違いも捉え、単に滑りを検出するだけでなく表面種類の識別にもつながる可能性を示しました。
指先が感じるものをAIに学習させる
センサーは豊富なデータストリームを出力するため、研究者らは機械学習ソフトウェアと組み合わせて触れている表面の種類を自動的に識別できるようにしました。各滑り信号から、振幅や変動の速さなどの単純な数値特徴を抽出し、乾燥、水濡れ、油濡れの条件下でステンレス鋼、セラミック、ガラス、不織布を識別するモデルを訓練しました。過学習を避けるためのクロスチェック法を用いると、各環境でテストケースの95%超を正しくラベル付けし、すべての条件を混ぜた場合でもほとんどのサンプルで高精度を示しました。最終デモでは、センサーを電子皮膚としてソフトロボットの手に取り付け、キュウリ、ジャガイモ、ニンジンなど日常の食品を把持させました。これらの物体が油で滑りやすくなっていても、特徴的な振動パターンを解析することでリアルタイムに滑りを追跡できました。
人工指先からデジタルな触覚へ
端的に言えば、本研究は人間の指紋構造を模倣し、スマート材料とAIを組み合わせることで、乾燥・湿潤・油膜いずれの場合でも物が滑りそうな瞬間を機械にほとんど人間のように感知させうることを示しています。センサーは印刷、曲げ、指やグリッパーへの巻き付けが可能であるため、将来の義手、協働ロボット、壊れやすい・汚れやすい・予測困難な物を扱う必要がある機器に適しています。これらの触覚信号がデジタルデータとして蓄積・自動解析されるにつれ、私たちの物理的な触覚はサイバースペースでも反映され、ロボットと人間が滑りやすい現実世界とより安全かつ自然に関わる未来を支えるでしょう。
引用: Adachi, T., Ozawa, K., Kamanoi, S. et al. AI-integrated bionic fingertip E-Skin for precision slippage detection in wet environments. Sci Rep 16, 14179 (2026). https://doi.org/10.1038/s41598-026-41096-z
キーワード: 電子皮膚, ロボットの触覚, 滑り検出, ソフトロボティクス, 触覚センシング