Clear Sky Science · it
Polpastrello bionico con E-Skin integrata e IA per la rilevazione precisa dello slittamento in ambienti umidi
Tatto intelligente per una vita quotidiana scivolosa
Chiunque abbia fatto cadere un bicchiere bagnato o faticato a tenere in mano un utensile da cucina unto sa quanto possano essere insidiosi gli oggetti scivolosi. Gli esseri umani di solito se la cavano grazie all’incredibile sensibilità delle punte delle dita, che avvertono piccole vibrazioni poco prima che qualcosa scivoli via. Questo studio descrive una “pelle” artificiale per polpastrelli che conferisce a robot e mani protesiche un senso del tatto altrettanto raffinato—anche quando gli oggetti sono ricoperti d’acqua o di olio—aprendo la strada a macchine più sicure e agili in cucine, fabbriche, ospedali e abitazioni.
Perché i robot hanno bisogno di un migliore senso dello slittamento
Le pelli elettroniche moderne permettono già alle macchine di percepire pressione, temperatura e perfino umidità. Tuttavia, rilevare in modo affidabile quando un oggetto sta per scivolare, soprattutto in condizioni bagnate o unte, è rimasto un importante punto cieco. Per robot che preparano cibo, lavano utensili o maneggiano oggetti delicati nel mondo reale, questa è una limitazione seria: una presa sicura deve essere sufficientemente ferma da evitare la caduta dell’oggetto ma abbastanza delicata da non schiacciarlo o danneggiarlo. Gli autori hanno voluto realizzare un sensore da indossare sul polpastrello capace di rilevare l’inizio dello scorrimento su qualsiasi tipo di superficie—asciutta, bagnata d’acqua o ricoperta d’olio—pur essendo flessibile, leggero e abbastanza economico per un uso diffuso.

Le impronte digitali come progetto guida
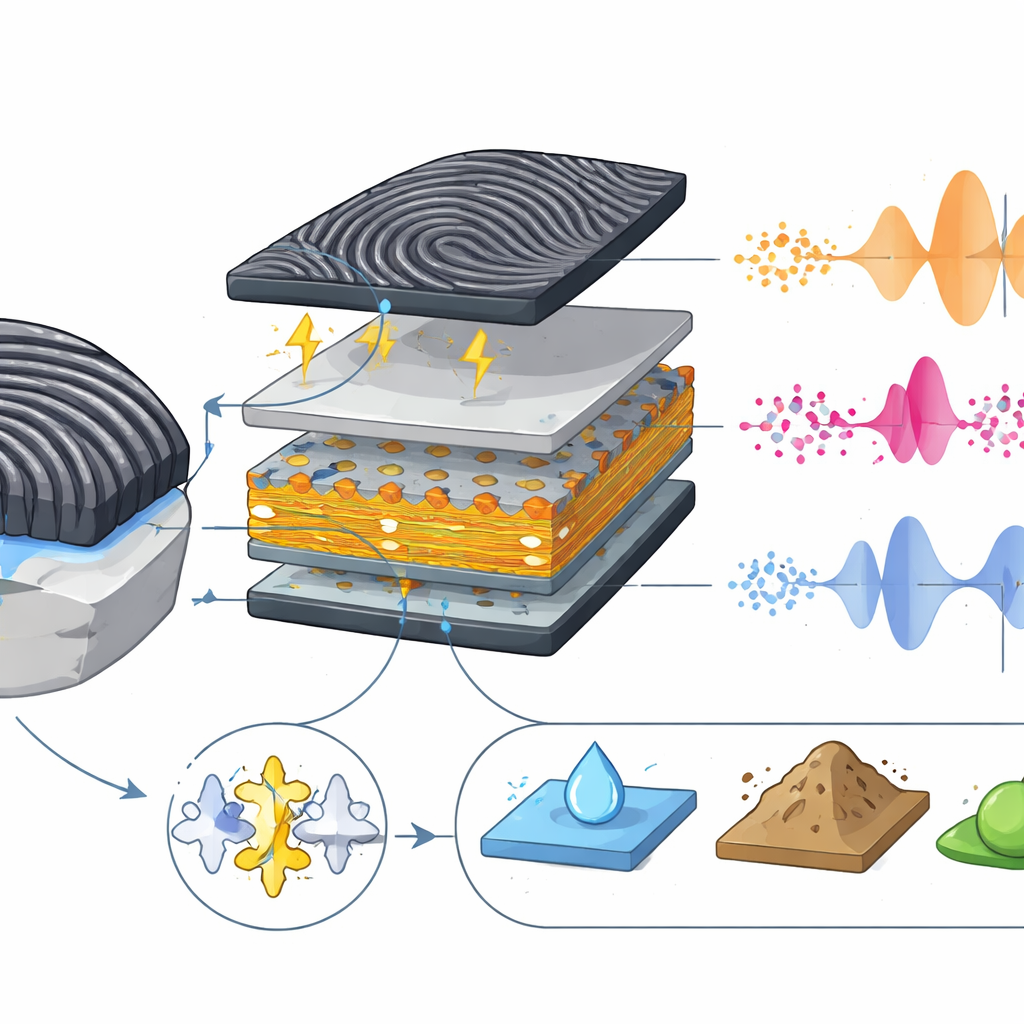
Il team si è ispirato direttamente al polpastrello umano, le cui creste delle impronte digitali modulano il modo in cui le vibrazioni si propagano nella pelle. Hanno fabbricato un film elettronico multistrato usando metodi interamente di serigrafia, una tecnica adatta alla produzione a basso costo e su larga scala. Il nucleo del dispositivo è uno strato sottile di una plastica speciale che genera cariche elettriche quando viene piegata o vibrata. Sopra questo hanno aggiunto uno strato morbido di gomma la cui superficie è stata incisa con un motivo casuale simile alle impronte digitali mediante un laser a biossido di carbonio. Quando questa superficie strutturata scorre su un altro materiale, le creste si attaccano e si staccano ripetutamente, creando brevi esplosioni di vibrazione che lo strato sensibile interno converte in segnali di tensione.
Rendere un segnale debole forte e durevole
Per garantire che questi segnali di vibrazione fossero forti e affidabili, i ricercatori hanno miscelato una piccola quantità di nanotubi di carbonio—tubi di carbonio a scala nanometrica—nella plastica attiva. Questo cambiamento ha migliorato l’allineamento molecolare nello strato, aumentando la sua capacità di generare carica quando viene mossa. Hanno inoltre perfezionato i passaggi di riscaldamento utilizzati durante la stampa in modo che il materiale cristallizzasse nella forma più reattiva. I test hanno mostrato che il sensore produceva segnali elettrici relativamente grandi e stabili e che le sue prestazioni resistevano anche dopo migliaia di cicli di piegamento, caratteristica importante per un dispositivo destinato a essere indossato su dita mobili o pinze robotiche.
Percepire lo slittamento in acqua e olio
La prova decisiva era se il polpastrello riuscisse a rilevare lo scorrimento su superfici bagnate. Montato su un dito artificiale, il sensore è stato trascinato su una piastra in acciaio inossidabile in tre condizioni: completamente asciutta, coperta d’acqua e ricoperta d’olio. In ogni caso le creste delle impronte hanno generato schemi di tensione regolari e ondulatori legati al classico comportamento “stick–slip” che si verifica quando una superficie alterna presa e rilascio. In modo cruciale, il sensore con la superficie strutturata ha prodotto segnali chiari e robusti anche quando l’olio riduceva l’attrito, mentre un sensore altrimenti identico ma liscio falliva in gran parte nelle stesse condizioni. Le scanalature hanno funzionato come canali che spingevano via il liquido e ripristinavano sufficiente contatto per produrre vibrazioni utilizzabili. Il dispositivo ha anche catturato sottili differenze nei segnali quando scorreva su materiali come ceramica, vetro e tessuto non tessuto, suggerendo la capacità di riconoscere non solo lo slittamento, ma anche il tipo di superficie.
Addestrare l’IA a riconoscere ciò che il polpastrello sente
Poiché il sensore genera flussi di dati ricchi, i ricercatori lo hanno accoppiato con software di apprendimento automatico in grado di identificare automaticamente il tipo di superficie toccata. Hanno estratto semplici caratteristiche numeriche da ciascun segnale di slittamento—come l’intensità e la velocità delle fluttuazioni—e hanno addestrato un modello a distinguere acciaio inossidabile, ceramica, vetro o tessuto non tessuto in condizioni asciutte, bagnate d’acqua e bagnate d’olio. Utilizzando metodi di convalida incrociata per evitare l’overfitting, il sistema ha etichettato correttamente oltre il 95 percento dei casi di test in ogni scenario, e quasi tutti i campioni quando tutte le condizioni erano miste. In una dimostrazione finale, il sensore è stato applicato come pelle elettronica a una mano robotica morbida che afferrava cibi di uso quotidiano come cetrioli, patate e carote. Anche quando questi oggetti erano unti, il sistema riusciva ancora a tracciare lo slittamento in tempo reale analizzando i tipici schemi di vibrazione.
Dai polpastrelli artificiali al tatto digitale
In termini semplici, questo lavoro dimostra che copiare la struttura delle impronte digitali umane e combinarla con materiali intelligenti e IA può dare alle macchine un sorprendente senso umano di quando qualcosa sta per scivolare—che sia asciutto, bagnato o unto. Poiché il sensore può essere stampato, piegato e avvolto attorno a dita o pinze, è ben adatto a future mani protesiche, robot collaborativi e altri dispositivi che devono maneggiare oggetti fragili, sporchi o imprevedibili. Man mano che sempre più di questi segnali tattili verranno trasformati in dati digitali e analizzati automaticamente, il nostro senso fisico del tatto potrebbe essere rispecchiato nel cyberspazio, favorendo un futuro in cui robot e umani interagiscono in modo più sicuro e fluido con il mondo scivoloso che ci circonda.
Citazione: Adachi, T., Ozawa, K., Kamanoi, S. et al. AI-integrated bionic fingertip E-Skin for precision slippage detection in wet environments. Sci Rep 16, 14179 (2026). https://doi.org/10.1038/s41598-026-41096-z
Parole chiave: pelle elettronica, tatto robotico, rilevazione dello slittamento, robotica morbida, sensing tattile