Clear Sky Science · de
AI-integrierte bionische Fingerkuppe E-Skin für präzise Rutschdetektion in nassen Umgebungen
Intelligentes Tasten für den rutschigen Alltag
Wer schon einmal ein nasses Glas fallen gelassen oder Schwierigkeiten hatte, ein fettiges Küchenutensil festzuhalten, kennt das Problem rutschiger Gegenstände. Menschen meistern das meist dank der enormen Sensibilität unserer Fingerspitzen, die winzige Vibrationen wahrnehmen, noch bevor etwas wegrutscht. Diese Studie beschreibt eine künstliche Fingerkuppe — eine „Haut“ — die Robotern und Prothesenhänden ein ähnlich feines Tastsinnesempfinden verleiht, selbst wenn die Oberflächen mit Wasser oder Öl beschichtet sind. Das eröffnet Möglichkeiten für sicherere, beweglichere Maschinen in Küchen, Fabriken, Krankenhäusern und Haushalten.
Warum Roboter einen besseren Ruchssinn brauchen
Moderne elektronische Häute lassen Maschinen bereits Druck, Temperatur und sogar Feuchtigkeit fühlen. Verlässlich zu erkennen, wann ein Gegenstand zu rutschen beginnt — insbesondere unter nassen oder fettigen Bedingungen — blieb jedoch eine große Schwachstelle. Für Roboter, die Lebensmittel vorbereiten, Werkzeuge reinigen oder empfindliche Gegenstände in der realen Welt handhaben, ist das ein ernstes Problem: Ein sicherer Griff muss stark genug sein, um ein Fallen zu verhindern, aber sanft genug, um nichts zu zerdrücken oder zu beschädigen. Die Forschenden wollten eine tragbare Fingerspitzen-Sensorik entwickeln, die den Beginn von Gleiten unter beliebigen Oberflächenbedingungen — trocken, mit Wasser benetzt oder ölig — erkennt und dabei flexibel, leicht und günstig genug für breite Anwendung ist.

Fingerabdrücke als Designvorbild
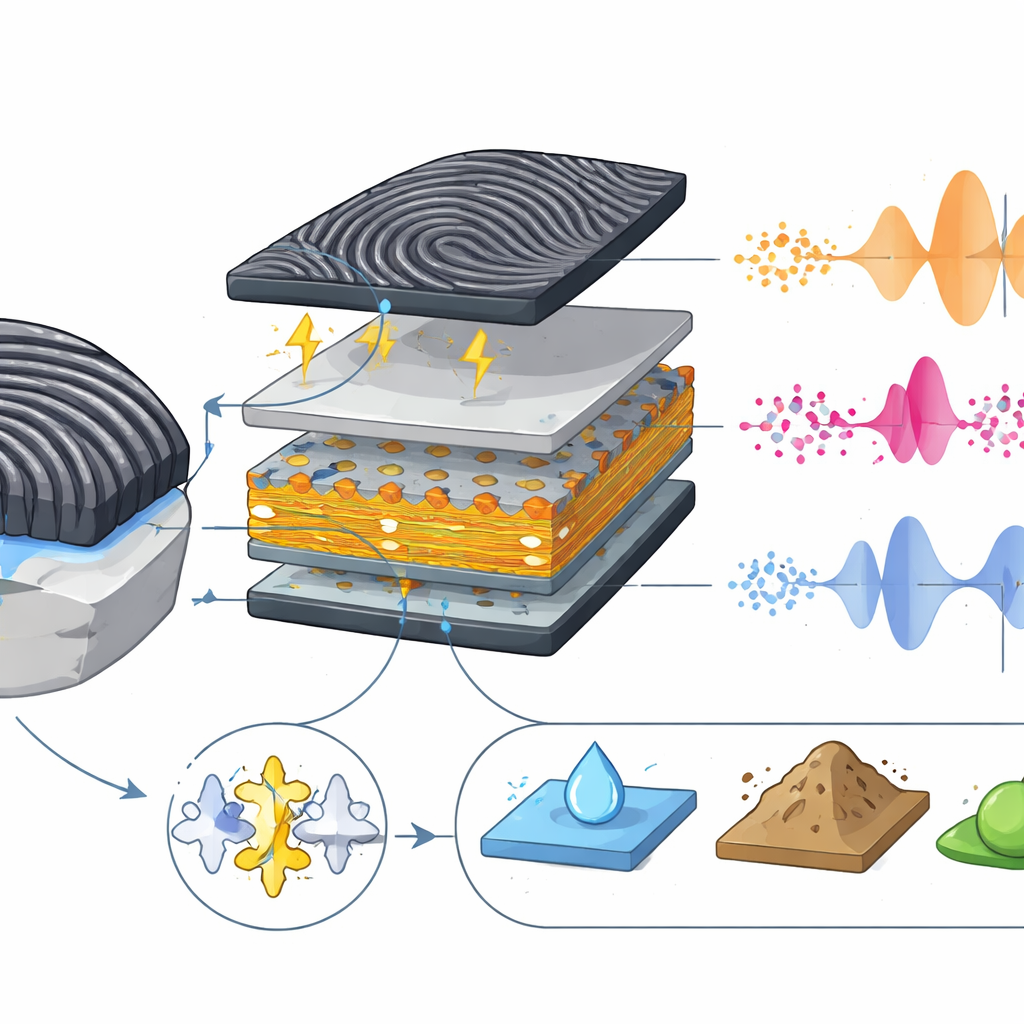
Das Team ließ sich direkt von der menschlichen Fingerspitze inspirieren: Die gerippten Fingerabdrücke beeinflussen, wie Vibrationen durch die Haut geleitet werden. Sie fertigten einen mehrschichtigen elektronischen Film mit vollflächigen Druckverfahren an — eine Technik, die sich gut für kostengünstige Massenproduktion eignet. Der Kern des Bauteils ist eine dünne Schicht eines speziellen Kunststoffs, der elektrische Ladungen erzeugt, wenn er gebogen oder vibriert wird. Darüber legten sie eine weiche Gummischicht, deren Oberfläche mit einem zufälligen, fingerprint-ähnlichen Muster mittels Kohlendioxidlaser strukturiert wurde. Wenn diese gemusterte Oberfläche über ein anderes Material gleitet, haften die Rillen wiederholt und lösen sich wieder, wodurch winzige Vibrationsstöße entstehen, die die innere Sensorsschicht in Spannungsimpulse umwandelt.
Ein winziges Signal laut und langlebig machen
Damit diese Vibrationssignale stark und zuverlässig ausfallen, mischten die Forschenden eine geringe Menge Kohlenstoffnanoröhren — nanometergroße Kohlenstoffröhren — in den aktiven Kunststoff. Diese subtile Änderung verbesserte die Ausrichtung der Moleküle in der Schicht und steigerte so ihre Fähigkeit, bei Bewegung Ladung zu erzeugen. Zudem optimierten sie die Wärmebehandlungsschritte beim Druck so, dass das Material in seiner reaktionsfreudigsten kristallinen Form auskristallisiert. Tests zeigten, dass der Sensor relativ große und stabile elektrische Signale erzeugte und dass seine Leistung auch nach Tausenden von Biegezyklen erhalten blieb — ein wichtiges Merkmal für ein Gerät, das an bewegten Fingern oder robotischen Greifern getragen werden soll.
Rutschen in Wasser und Öl fühlen
Die entscheidende Prüfung war, ob die Fingerkuppe Gleiten auf nassen Oberflächen wahrnehmen kann. Auf einer künstlichen Fingerkuppe montiert, wurde der Sensor über eine Edelstahlplatte unter drei Bedingungen gezogen: völlig trocken, mit Wasser bedeckt und mit Öl beschichtet. In allen Fällen erzeugten die Fingerabdruckrillen regelmäßige, wellenartige Spannungsmuster, die mit dem klassischen „Stick–Slip“-Verhalten verknüpft sind, das auftritt, wenn eine Oberfläche abwechselnd greift und loslässt. Entscheidend erzeugte der gemusterte Sensor klare, starke Signale selbst dann, wenn Öl die Reibung reduzierte, während ein ansonsten identischer, aber glatter Sensor unter denselben Bedingungen weitgehend versagte. Die Rillen wirkten wie Kanäle, die Flüssigkeit zur Seite drückten und genug Kontakt wiederherstellten, um verwertbare Vibrationen zu erzeugen. Das Gerät zeichnete außerdem feine Unterschiede in den Signalen beim Gleiten über Materialien wie Keramik, Glas und Gewebe auf, was auf die Fähigkeit hindeutet, nicht nur Rutschen, sondern auch Oberflächentypen zu erkennen.
KI beibringen, was die Fingerkuppe fühlt
Da der Sensor reichhaltige Datenströme liefert, kombinierten die Forschenden ihn mit maschineller Lernsoftware, die automatisch erkennen konnte, welche Art von Oberfläche berührt wurde. Sie extrahierten einfache numerische Merkmale aus jedem Rutschsignal — etwa wie stark und wie schnell es schwankte — und trainierten ein Modell, um Edelstahl von Keramik, Glas oder Vliesstoff unter trockenen, wasserbenetzten und ölig-benetzten Bedingungen zu unterscheiden. Mit Kreuzvalidierungsmethoden zur Vermeidung von Overfitting klassifizierte das System mehr als 95 Prozent der Testfälle in jeder Einstellung korrekt und nahezu alle Proben, wenn alle Bedingungen gemischt wurden. In einer abschließenden Demonstration wurde der Sensor als elektronische Haut an einer weichen Roboterhand angebracht, die Alltagslebensmittel wie Gurken, Kartoffeln und Karotten griff. Selbst wenn diese Gegenstände geölt waren, konnte das System durch Analyse der charakteristischen Vibrationsmuster das Rutschen in Echtzeit nachverfolgen.
Von künstlichen Fingerspitzen zum digitalen Tastsinn
Vereinfacht zeigt diese Arbeit, dass das Kopieren der Struktur menschlicher Fingerabdrücke und die Kombination mit intelligenten Materialien und KI Maschinen ein bemerkenswert menschliches Gefühl dafür geben kann, wann Dinge zu rutschen beginnen — ob trocken, nass oder ölig. Weil der Sensor gedruckt, gebogen und um Finger oder Greifer gewickelt werden kann, eignet er sich gut für zukünftige Prothesenhände, kollaborative Roboter und andere Geräte, die fragile, schmutzige oder unvorhersehbare Objekte handhaben müssen. Wenn immer mehr dieser taktilen Signale in digitale Daten umgewandelt und automatisch analysiert werden, könnte unser physischer Tastsinn im Cyberspace gespiegelt werden und eine Zukunft unterstützen, in der Roboter und Menschen sicherer und nahtloser mit der rutschigen Welt um sie herum interagieren.
Zitation: Adachi, T., Ozawa, K., Kamanoi, S. et al. AI-integrated bionic fingertip E-Skin for precision slippage detection in wet environments. Sci Rep 16, 14179 (2026). https://doi.org/10.1038/s41598-026-41096-z
Schlüsselwörter: elektronische Haut, robotischer Tastsinn, Rutschdetektion, weiche Robotik, taktiles Sensorik