Clear Sky Science · ar
طرف إصبعي بيوني من الجلد الإلكتروني مدمج بالذكاء الاصطناعي للكشف الدقيق عن الانزلاق في البيئات الرطبة
لمس ذكي لحياة يومية زلقة
من سقط منه كوب مبلل أو واجه صعوبة في إمساك أداة مطبخ دهنية يعرف كم تكون الأشياء الزلقة مزعجة. البشر عادةً يتعاملون مع ذلك بفضل حساسية أطراف أصابعنا المذهلة، التي تلتقط اهتزازات صغيرة قبل أن تنزلق الأشياء. تصف هذه الدراسة «جلد» طرف إصبع صناعي يمنح الروبوتات والأيادي الاصطناعية إحساسًا لمسيًا دقيقًا مشابهًا — حتى عندما تكون الأسطح مغطاة بالماء أو الزيت — ما يفتح الباب أمام آلات أكثر أمانًا ومرونة في المطابخ والمصانع والمستشفيات والمنازل.
لماذا تحتاج الروبوتات إلى إحساس أفضل بالانزلاق
تسمح الجلود الإلكترونية الحديثة للآلات بالفعل باستشعار الضغط ودرجة الحرارة وحتى الرطوبة. لكن الكشف الموثوق عن لحظة بدء انزلاق جسم، خاصةً في ظروف مبللة أو دهنية، ظل نقطة عمياء كبيرة. بالنسبة للروبوتات التي تعد الطعام أو تغسل الأدوات أو تتعامل مع أشياء حساسة في العالم الواقعي، هذا قيد خطير: يجب أن تكون القبضة متينة بما يكفي لمنع إسقاط الشيء ولكن لطيفة بما لا تتسبب في سحقه أو إتلافه. هدف الباحثين كان بناء حساس طرف إصبع يمكن ارتداؤه يكتشف بداية الانزلاق تحت أي ظروف سطحية — جافة أو مبللة بالماء أو مغطاة بالزيت — مع كونه مرنًا وخفيف الوزن ورخيصًا بما يكفي للاستخدام الواسع.

بصمات الأصابع كقالب تصميم
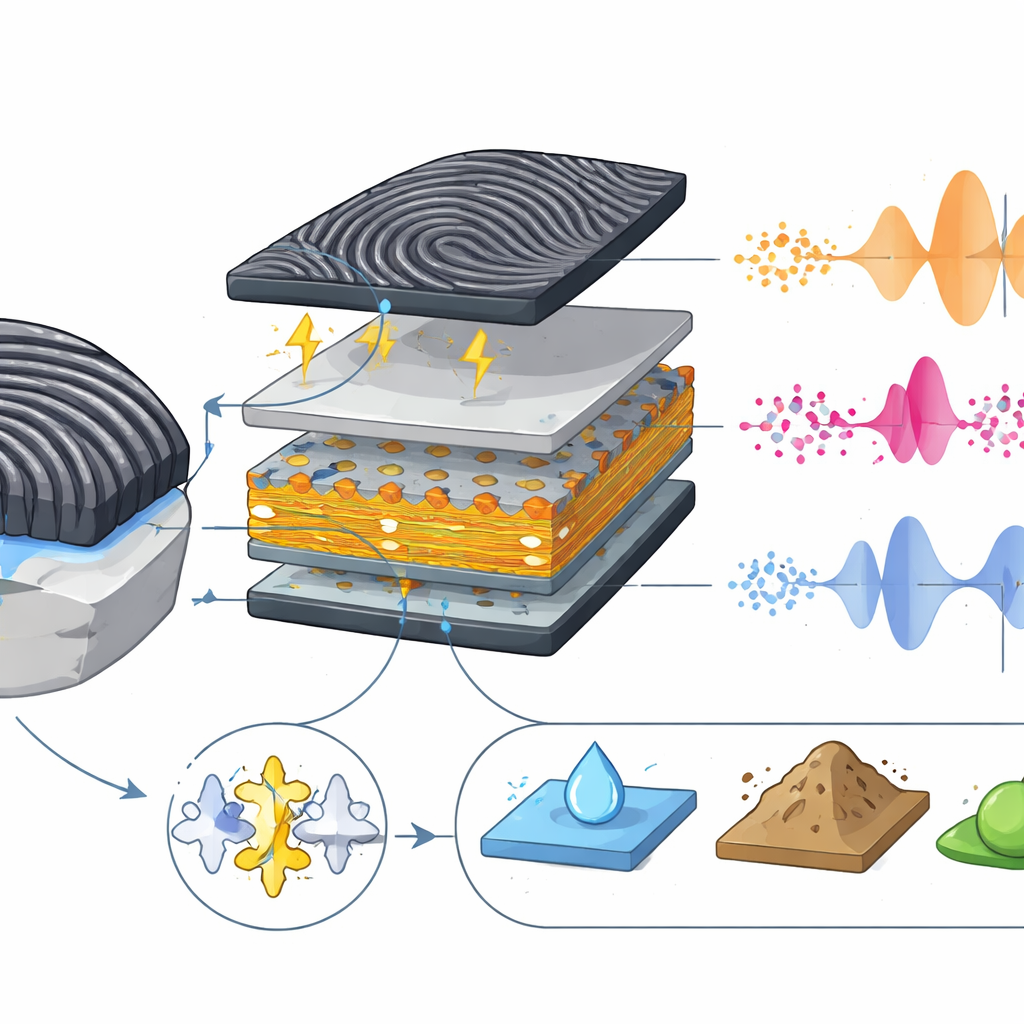
استلهم الفريق مباشرةً من طرف الإصبع البشري، إذ تساهم تلال بصمات الأصابع في ضبط كيفية انتقال الاهتزازات عبر الجلد. صنعوا فيلمًا إلكترونيًا متعدد الطبقات باستخدام طرق الطباعة الشاشة الكاملة، وهي تقنية مناسبة للإنتاج منخفض التكلفة وعلى نطاق واسع. جوهر الجهاز هو طبقة رقيقة من بلاستيك خاص يولد شحنات كهربائية عند انحنائه أو اهتزازه. وعلى هذه الطبقة أضافوا طبقة مطاطية ناعمة نقشت على سطحها نمطًا عشوائيًا شبيهاً ببصمة الإصبع باستخدام ليزر ثاني أكسيد الكربون. عندما ينزلق هذا السطح المنقوش عبر مادة أخرى، تلتصق التلال وتتحرر مرارًا مما يخلق دفعات اهتزازية صغيرة تحولها طبقة الاستشعار الداخلية إلى إشارات كهربائية.
تكبير الإشارة الصغيرة وجعلها متينة
لضمان أن تكون إشارات الاهتزاز قوية وموثوقة، أضاف الباحثون كمية صغيرة من أنابيب الكربون النانوية — أنابيب كربون على مقياس النانومتر — إلى البلاستيك النشط. هذا التغيير البسيط حسن من انتظام ترتيب الجزيئات داخل الطبقة، مما زاد من قدرتها على توليد الشحنة عند الحركة. كما ضبطوا خطوات التسخين المستخدمة أثناء الطباعة بحيث يتبلور المادة في شكلها الأكثر استجابة. أظهرت الاختبارات أن الحساس أنتج إشارات كهربائية كبيرة ومستقرة نسبيًا، وأن أداءه ظل جيدًا حتى بعد آلاف دورات الانحناء، وهي ميزة مهمة لجهاز مصمم ليُرتدى على أصابع متحركة أو ملاقط روبوتية.
إحساس بالانزلاق في الماء والزيت
الاختبار الحقيقي كان ما إذا كان طرف الإصبع يمكنه استشعار الانزلاق على أسطح مبللة. مركبًا على إصبع صناعي، سُحب الحساس عبر لوح من الفولاذ المقاوم للصدأ تحت ثلاث حالات: جاف تمامًا، مغطى بالماء، ومُغطى بالزيت. في كل حالة، ولدت تلال بصمة الإصبع نماذج جهد موجية منتظمة مرتبطة بسلوك «الالتصاق–الانزلاق» الكلاسيكي الذي يحدث عندما تقبض السطح وتطلقه بالتناوب. والأهم أن الحساس المنقوش أنتج إشارات واضحة وقوية حتى عندما خفّض الزيت الاحتكاك، بينما فشل حساس متماثل أملس إلى حد كبير تحت نفس الظروف. عملت الأخاديد كقنوات تدفع السائل جانبًا وتستعيد ما يكفي من التلامس لإنتاج اهتزازات قابلة للاستخدام. كما التقط الجهاز فروقًا دقيقة في الإشارات عند الانزلاق على مواد مثل السيراميك والزجاج والقماش، مما يوحي بقدرته على تمييز ليس فقط الانزلاق بل نوع السطح أيضًا.
تعليم الذكاء الاصطناعي للتعرّف على ما يشعر به طرف الإصبع
بما أن الحساس يولد تيارات بيانات غنية، اقترن ببرمجيات تعلّم آلي يمكنها تحديد نوع السطح التي يلمسه تلقائيًا. استخرجوا ميزات رقمية بسيطة من كل إشارة انزلاق — مثل قوة التذبذب وسرعته — ودربوا نموذجًا لتمييز الفولاذ المقاوم للصدأ عن السيراميك أو الزجاج أو النسيج غير المنسوج تحت ظروف جافة ومبللة بالماء ومبللة بالزيت. باستخدام أساليب التحقق المتبادل لتجنب الإفراط في التخصيص، صنّف النظام أكثر من 95 بالمئة من حالات الاختبار بشكل صحيح في كل إعداد، تقريبًا لجميع العينات عند خلط كل الظروف معًا. في عرض أخير، رُكّب الحساس كجلد إلكتروني على يد روبوتية ناعمة أمسكت أطعمة يومية مثل الخيار والبطاطا والجزر. حتى عندما كانت هذه الأجسام مدهونة بالزيت، تمكن النظام من تتبع الانزلاق في الزمن الحقيقي عبر تحليل أنماط الاهتزاز المميزة.
من أطراف إصبع اصطناعية إلى لمس رقمي
بعبارات بسيطة، تُظهر هذه العملة أن نسخ بنية بصمات الأصابع البشرية ودمجها مع مواد ذكية والذكاء الاصطناعي يمكن أن يمنح الآلات إحساسًا بشريًا ملحوظًا بلحظة اقتراب الأشياء من الانزلاق — سواء كانت جافة أو رطبة أو دهنية. وبما أن الحساس يمكن طباعته وانحناؤه ولفّه حول الأصابع أو الملاقط، فهو مناسب لأيدي اصطناعية مستقبلية وروبوتات تعاونية وأجهزة أخرى يجب أن تتعامل مع أشياء هشة أو فوضوية أو غير متوقعة. ومع تحويل المزيد من هذه الإشارات اللمسية إلى بيانات رقمية وتحليلها تلقائيًا، قد ينعكس إحساسنا الفيزيائي باللمس في الفضاء الإلكتروني، داعمًا مستقبلًا تتفاعل فيه الروبوتات والبشر بأمان وسلاسة أكبر مع العالم الزلق من حولهم.
الاستشهاد: Adachi, T., Ozawa, K., Kamanoi, S. et al. AI-integrated bionic fingertip E-Skin for precision slippage detection in wet environments. Sci Rep 16, 14179 (2026). https://doi.org/10.1038/s41598-026-41096-z
الكلمات المفتاحية: جلد إلكتروني, لمس روبوتي, كشف الانزلاق, روبوتات ناعمة, استشعار لمسي