Clear Sky Science · tr
Islak ortamlarda hassas kayma tespiti için yapay zekâ entegreli biyonik parmak ucu E-Kabı
Kaygan gündelik yaşam için akıllı dokunuş
Islak bir bardağı düşüren ya da yağlı bir mutfak aletini tutmakta zorlanan herkes, kaygan nesnelerin ne kadar zor olabildiğini bilir. İnsanlar genellikle parmak uçlarımızın muazzam hassasiyeti sayesinde başarılı olur; bir şey kaymadan hemen önce ortaya çıkan çok küçük titreşimleri algılarız. Bu çalışma, robotlara ve protez ellere benzer biçimde ince bir dokunma duygusu kazandıran yapay bir parmak ucu “derisini” tanımlıyor—nesneler su veya yağla kaplı olsa bile—bu da mutfaklarda, fabrikalarda, hastanelerde ve evlerde daha güvenli ve çevik makinelerin kapısını aralıyor.
Robotların neden daha iyi bir kayma hissine ihtiyacı var
Günümüz elektronik derileri makinelerin basıncı, sıcaklığı ve hatta nemi hissetmesine olanak tanıyor. Ancak bir nesnenin kaymaya başladığını güvenilir biçimde algılamak, özellikle ıslak veya yağlı koşullarda, büyük bir kör nokta olarak kaldı. Gerçek dünyada yemek hazırlayan, alet yıkayan veya hassas nesnelerle uğraşan robotlar için bu ciddi bir sınırlama: güvenli bir kavrayış nesnenin düşmesini önleyecek kadar sıkı, fakat onu ezmeyecek veya zarar vermeyecek kadar nazik olmalı. Yazarlar, yüzey koşulu ne olursa olsun—kuru, suyla ıslatılmış veya yağla kaplı—kaymanın başlangıcını algılayabilen; esnek, hafif ve yaygın kullanım için yeterince ucuz taşınabilir bir parmak ucu sensörü geliştirmeyi hedeflediler.

Tasarım için parmak izleri model olarak alındı
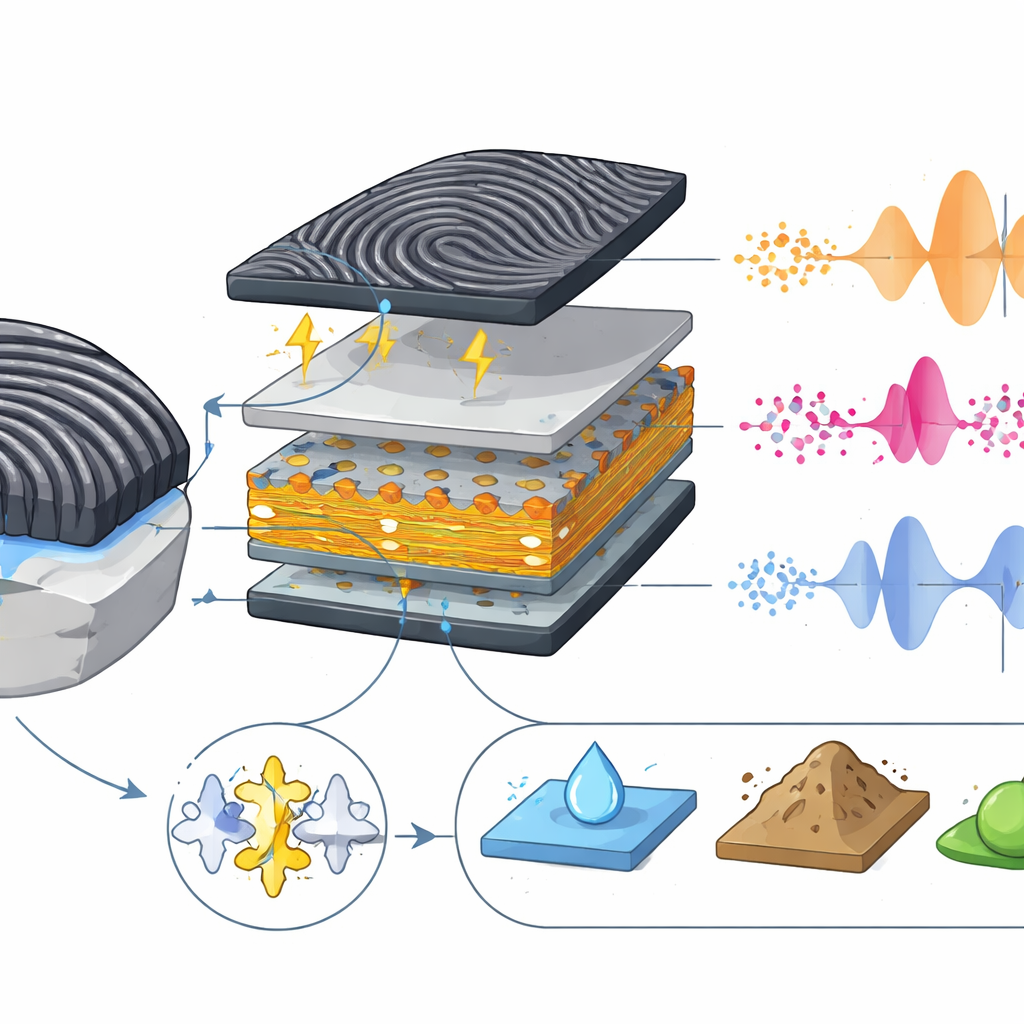
Ekip, titreşimlerin deriden nasıl yayıldığını ayarlamaya yardımcı olan sıralı parmak izi çıkıntılarıyla doğrudan insan parmak ucundan ilham aldı. Düşük maliyetli, seri üretime uygun bir yöntem olan tüm-ekran-baskı (all-screen-printing) teknikleriyle çok katmanlı bir elektronik film ürettiler. Cihazın çekirdeği, büküldüğünde veya titreştiğinde elektrik yükü üreten özel bir plastiğin ince bir katmanından oluşuyor. Bunun üzerine, yüzeyi karbondioksit lazeri ile rastgele, parmak izi benzeri bir desenle oyulmuş yumuşak bir kauçuk tabaka eklediler. Bu desenli yüzey başka bir malzeme üzerinde kaydığında, çıkıntılar tekrarlayan yapışma ve serbest bırakma davranışıyla küçük titreşim patlamaları oluşturur; içteki algılama katmanı da bunları voltaj sinyallerine çevirir.
Küçük bir sinyali güçlü ve dayanıklı kılmak
Bu titreşim sinyallerinin güçlü ve güvenilir olmasını sağlamak için araştırmacılar etkin plastiğe küçük miktarda karbon nanotüp—nanometre ölçeğinde karbon tüpleri—eklediler. Bu ince değişiklik, katmandaki moleküllerin daha iyi hizalanmasını iyileştirerek hareket ettirildiğinde yük üretme yeteneğini artırdı. Ayrıca baskı sırasında uygulanan ısıtma adımlarını malzemenin en yanıt veren kristal yapıda oluşması için hassasiyetle ayarladılar. Testler, sensörün nispeten büyük ve kararlı elektrik sinyalleri ürettiğini ve binlerce bükülme çevrimi sonrasında bile performansının korunduğunu gösterdi; bu, hareketli parmaklara veya robotik kavrayıcılara takılacak bir cihaz için önemli bir özellik.
Su ve yağda kaymayı hissetmek
Gerçek sınama, parmak ucunun ıslak yüzeylerde kaymayı algılayıp algılayamayacağıydı. Yapay bir parmağa monte edilen sensör, paslanmaz çelik bir levha üzerinde üç koşulda çekildi: tamamen kuru, suyla kaplı ve yağla kaplı. Her durumda parmak izi çıkıntıları, yüzeyin alternatif olarak tutunup bırakmasıyla ortaya çıkan klasik “stick–slip” davranışıyla ilişkili düzenli, dalga benzeri voltaj desenleri üretti. Kritik olarak, desenli sensör yağ sürtünmeyi azalttığında bile net ve güçlü sinyaller üretti; buna karşılık, aksi takdirde aynı fakat düz bir sensör aynı koşullar altında büyük ölçüde başarısız oldu. Oyuklar, sıvıyı yana iten ve kullanılabilir titreşimleri üretecek kadar teması geri sağlayan kanallar gibi davrandı. Cihaz ayrıca seramik, cam ve kumaş gibi malzemeler üzerinde kayarken sinyallerdeki ince farkları da yakalayarak yalnızca kaymayı değil, yüzey türünü de tanıma yeteneğine işaret etti.
Parmak ucunun hissettiklerini tanıması için yapay zekâ eğitmek
Sensör zengin veri akışları sağladığı için araştırmacılar bunu hangi yüzeye dokunulduğunu otomatik olarak tanıyabilen makine öğrenmesi yazılımıyla eşleştirdiler. Her kayma sinyalinden ne kadar güçlü ve ne kadar hızlı değiştiği gibi basit sayısal özellikler çıkardılar ve modeli paslanmaz çeliği seramik, cam veya dokusuz kumaştan kuru, suyla ıslatılmış ve yağla ıslatılmış koşullar altında ayırt edecek şekilde eğittiler. Aşırı uyumu önlemek için çapraz doğrulama yöntemleri kullanıldığında, sistem her ortamda test vakalarının yüzde 95’inden fazlasını doğru etiketledi ve tüm koşullar karıştırıldığında neredeyse tüm örnekleri doğru sınıflandırdı. Son bir gösterimde sensör, elektronik deri olarak yumuşak bir robot eline takıldı ve salatalık, patates ve havuç gibi günlük yiyecekleri kavradı. Nesneler yağlı olsa bile sistem, karakteristik titreşim desenlerini analiz ederek gerçek zamanlı olarak kaymayı izleyebildi.
Yapay parmak uçlarından dijital dokunuşa
Basitçe söylemek gerekirse, bu çalışma insan parmak izlerinin yapısını kopyalamanın, akıllı malzemeler ve yapay zekâ ile birleştirildiğinde makinelerin bir şeylerin kaymak üzere olduğunu insan benzeri bir doğrulukla hissetmesini sağlayabileceğini gösteriyor—kuru, ıslak veya yağlı olsun. Sensörün baskı yoluyla üretilebilmesi, bükülebilmesi ve parmaklara veya kavrayıcılara sarılabilmesi, onu geleceğin protez elleri, işbirlikçi robotları ve kırılgan, dağınık veya öngörülemez nesnelerle başa çıkması gereken diğer aygıtlar için uygun kılıyor. Bu dokunsal sinyaller dijital verilere dönüştürüldükçe ve otomatik olarak analiz edildikçe, fiziksel dokunma duyumuz siberuzayda da yansıtılabilir ve robotlar ile insanların çevremizdeki kaygan dünya ile daha güvenli ve uyumlu etkileşimde bulunmasını destekleyen bir gelecek mümkün olabilir.
Atıf: Adachi, T., Ozawa, K., Kamanoi, S. et al. AI-integrated bionic fingertip E-Skin for precision slippage detection in wet environments. Sci Rep 16, 14179 (2026). https://doi.org/10.1038/s41598-026-41096-z
Anahtar kelimeler: elektronik deri, robotik dokunma, kayma tespiti, yumuşak robotik, dokunsal algılama