Clear Sky Science · pt
Ponta de dedo biônica com E-Skin integrada a IA para detecção precisa de deslizamento em ambientes úmidos
Toque inteligente para a vida cotidiana escorregadia
Quem já deixou cair um copo molhado ou teve dificuldade para segurar um utensílio de cozinha engordurado sabe como objetos escorregadios são traiçoeiros. Os humanos normalmente conseguem graças à incrível sensibilidade de nossas pontas dos dedos, que detectam pequenas vibrações pouco antes de algo escorregar. Este estudo descreve uma “pele” artificial para ponta de dedo que confere a robôs e mãos protéticas um senso de toque igualmente refinado — mesmo quando os objetos estão cobertos de água ou óleo — abrindo caminho para máquinas mais seguras e ágeis em cozinhas, fábricas, hospitais e residências.
Por que robôs precisam de uma melhor percepção de deslizamento
Peles eletrônicas modernas já permitem que máquinas sintam pressão, temperatura e até umidade. Mas detectar de forma confiável quando um objeto está prestes a deslizar, especialmente em condições úmidas ou oleosas, continua sendo uma falha importante. Para robôs que preparam alimentos, lavam ferramentas ou manipulam itens delicados no mundo real, isso é uma limitação séria: a pegada segura precisa ser firme o bastante para evitar a queda do objeto, mas suave para não esmagá-lo ou danificá-lo. Os autores se propuseram a construir um sensor de ponta de dedo wearable que possa detectar o início do deslizamento sob qualquer condição de superfície — seco, molhado com água ou coberto por óleo — sendo flexível, leve e barato o suficiente para uso amplo.

Impressões digitais como plano de projeto
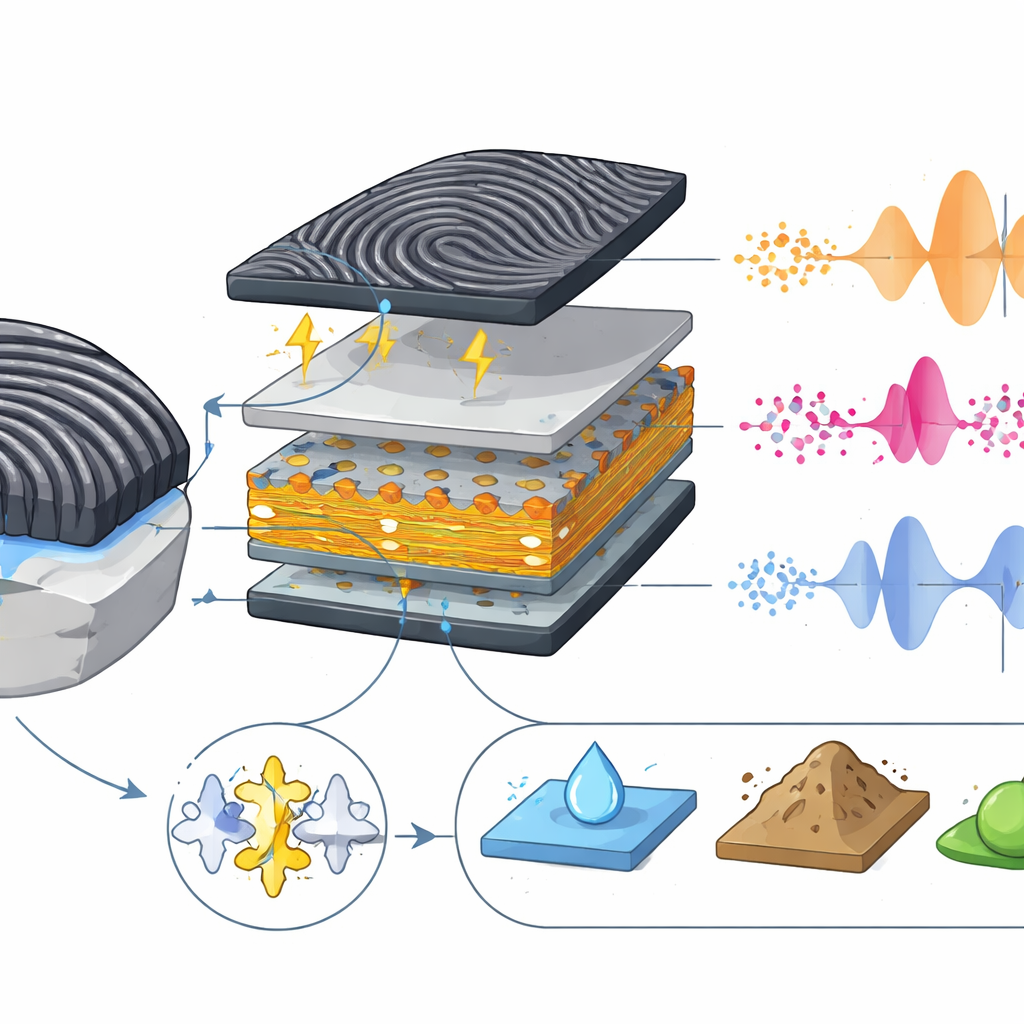
A equipe buscou inspiração direta na ponta do dedo humano, cujas cristas das impressões digitais ajudam a moldar como as vibrações se propagam pela pele. Fabricaram um filme eletrônico multicamadas usando métodos de impressão em tela, uma técnica bem adequada para produção em massa de baixo custo. O núcleo do dispositivo é uma camada fina de um plástico especial que gera cargas elétricas quando é dobrado ou vibrado. Sobre essa camada, adicionaram uma camada de borracha macia cuja superfície foi esculpida com um padrão aleatório semelhante a impressões digitais usando um laser de dióxido de carbono. Quando essa superfície padronizada desliza sobre outro material, as cristas repetidamente aderem e se soltam, criando pequenos surtos de vibração que a camada sensora interna converte em sinais de tensão.
Tornando um sinal pequeno em algo alto e durável
Para garantir que esses sinais de vibração fossem fortes e confiáveis, os pesquisadores misturaram uma pequena quantidade de nanotubos de carbono — tubos de carbono em escala nanométrica — no plástico ativo. Essa mudança sutil melhorou o alinhamento das moléculas na camada, aumentando sua capacidade de gerar carga quando movida. Também ajustaram cuidadosamente as etapas de aquecimento usadas durante a impressão para que o material cristalizasse em sua forma mais responsiva. Testes mostraram que o sensor produzia sinais elétricos relativamente grandes e estáveis, e que seu desempenho se manteve mesmo após milhares de ciclos de flexão, uma característica importante para um dispositivo destinado a ser usado em dedos móveis ou garras robóticas.
Percebendo deslizamento na água e no óleo
O teste decisivo foi saber se a ponta do dedo conseguia detectar deslizamento em superfícies molhadas. Montado em um dedo artificial, o sensor foi arrastado por uma placa de aço inoxidável sob três condições: completamente seca, coberta de água e revestida de óleo. Em todos os casos, as cristas das impressões digitais geraram padrões regulares, em forma de onda, de tensão ligados ao comportamento clássico de "stick–slip" que ocorre quando uma superfície alternadamente prende e solta. Crucialmente, o sensor padronizado produziu sinais claros e fortes mesmo quando o óleo reduziu o atrito, enquanto um sensor idêntico, mas liso, falhou em grande parte nas mesmas condições. Os sulcos atuaram como canais que empurraram o líquido para o lado e restauraram contato suficiente para produzir vibrações utilizáveis. O dispositivo também capturou diferenças sutis nos sinais ao deslizar sobre materiais como cerâmica, vidro e tecido, sugerindo sua capacidade de reconhecer não apenas o deslizamento, mas o tipo de superfície.
Ensinando a IA a reconhecer o que a ponta do dedo sente
Como o sensor gera fluxos ricos de dados, os pesquisadores o emparelharam com software de aprendizado de máquina capaz de identificar automaticamente que tipo de superfície estava tocando. Extraíram características numéricas simples de cada sinal de deslizamento — como intensidade e rapidez das flutuações — e treinaram um modelo para distinguir aço inoxidável de cerâmica, vidro ou tecido não tecido em condições seca, molhada com água e molhada com óleo. Usando métodos de validação cruzada para evitar overfitting, o sistema rotulou corretamente mais de 95% dos casos de teste em cada configuração, e quase todas as amostras quando todas as condições foram misturadas. Em uma demonstração final, o sensor foi anexado como pele eletrônica a uma mão robótica macia que segurou alimentos do dia a dia como pepinos, batatas e cenouras. Mesmo quando esses objetos estavam engordurados, o sistema ainda conseguia rastrear o deslizamento em tempo real ao analisar os padrões característicos de vibração.
De pontas de dedos artificiais ao toque digital
Em termos simples, este trabalho mostra que copiar a estrutura das impressões digitais humanas e combiná-la com materiais inteligentes e IA pode dar às máquinas um senso notavelmente humano de quando algo está prestes a escorregar — seja seco, molhado ou oleoso. Como o sensor pode ser impresso, dobrado e envolvido em torno de dedos ou garras, ele é bem adequado para futuras mãos protéticas, robôs colaborativos e outros dispositivos que precisam manipular objetos frágeis, sujos ou imprevisíveis. À medida que mais desses sinais táteis são transformados em dados digitais e analisados automaticamente, nosso sentido físico do toque pode ser espelhado no ciberespaço, apoiando um futuro em que robôs e humanos interajam de forma mais segura e integrada com o mundo escorregadio ao nosso redor.
Citação: Adachi, T., Ozawa, K., Kamanoi, S. et al. AI-integrated bionic fingertip E-Skin for precision slippage detection in wet environments. Sci Rep 16, 14179 (2026). https://doi.org/10.1038/s41598-026-41096-z
Palavras-chave: pele eletrônica, toque robótico, detecção de deslizamento, robótica macia, sensoriamento tátil