Clear Sky Science · ru
Биоинтегрированный электронный кончик пальца E-Skin с ИИ для точного обнаружения скольжения во влажной среде
Умное прикосновение для скользкой повседневности
Кто хоть раз ронял мокрый стакан или с трудом удерживал жирную кухонную утварь, знает, насколько коварны скользкие предметы. Люди обычно справляются благодаря невероятной чувствительности кончиков пальцев, которые улавливают едва заметные вибрации непосредственно перед тем, как предмет начнет скользить. В этом исследовании описан искусственный «кожный» кончик пальца, который наделяет роботов и протезы схожим тонким осязанием — даже когда объекты покрыты водой или маслом — что открывает путь к более безопасным и проворным машинам на кухнях, в цехах, больницах и домах.
Почему роботам нужен более точный датчик скольжения
Современные электронные кожи уже позволяют машинам ощущать давление, температуру и даже влажность. Но надежное определение момента, когда предмет собирается соскользнуть, особенно в условиях влаги или жирности, остается важной «слепой зоной». Для роботов, занятых приготовлением пищи, мойкой инструментов или обращением с хрупкими предметами в реальных условиях, это серьезное ограничение: захват должен быть достаточно надежным, чтобы не уронить предмет, но в то же время достаточно мягким, чтобы не сжать или не повредить его. Авторы поставили цель создать носимый сенсорный кончик пальца, способный обнаруживать начало скольжения при любых условиях поверхности — сухой, мокрой водой или покрытой маслом — при этом гибкий, легкий и недорогой для широкого применения.

Отпечатки пальцев как чертеж дизайна
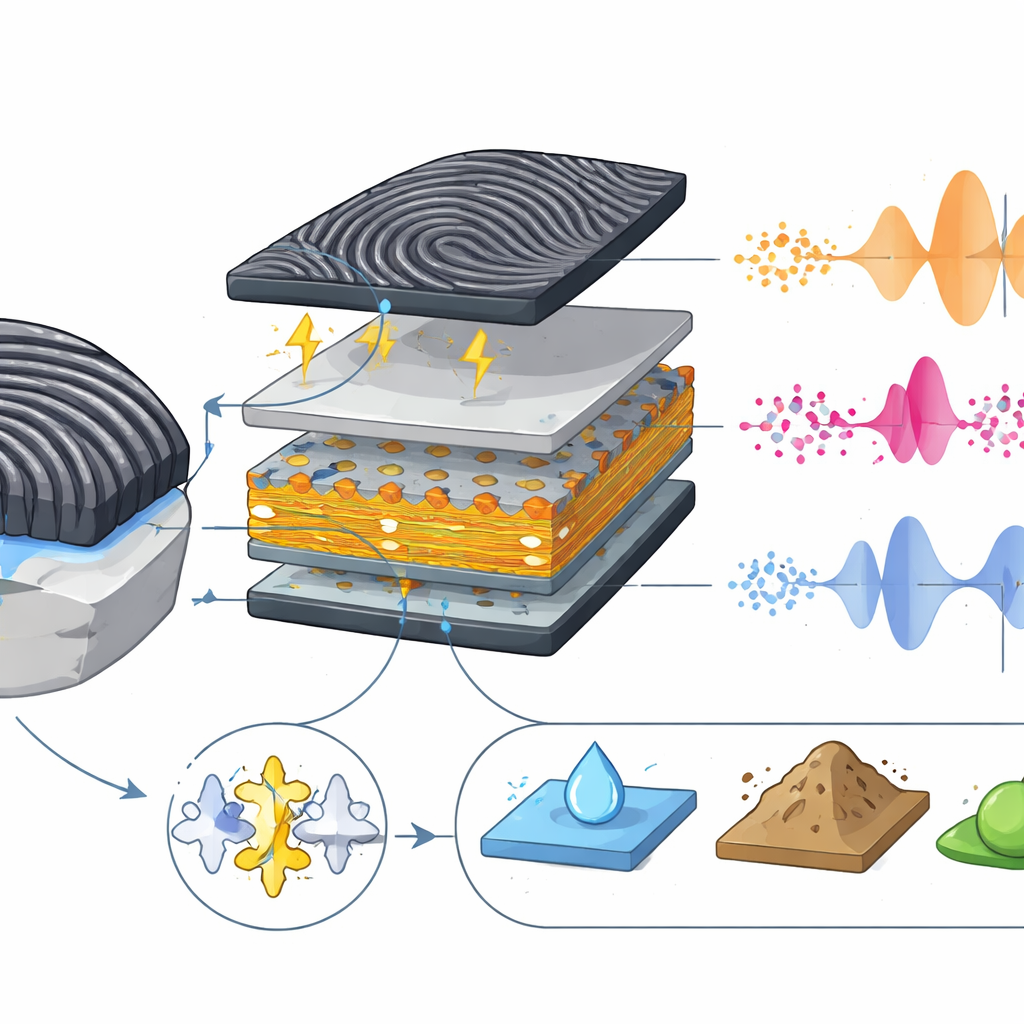
Команда черпала прямое вдохновение у человеческого кончика пальца: бороздчатые отпечатки помогают настраивать распространение вибраций по коже. Они изготовили многослойную электронную пленку, используя полностью шелкографические методы печати — технологию, хорошо подходящую для недорогого массового производства. Ядро устройства представляет собой тонкий слой специального пластика, генерирующего электрические заряды при изгибе или вибрации. Сверху положили мягкий резиновый слой, поверхность которого лазером CO2 прорезали в случайный узор типа отпечатка. Когда эта рифленая поверхность скользит по другому материалу, гребни многократно прилипают и отрываются, создавая крошечные всплески вибрации, которые внутренний сенсорный слой превращает в электрические сигналы напряжения.
Как сделать слабый сигнал громким и долговечным
Чтобы обеспечить сильные и надежные вибрационные сигналы, исследователи добавили небольшое количество углеродных нанотрубок — наномасштабных углеродных трубок — в активный пластик. Это тонкое изменение улучшило упорядочивание молекул в слое, повысив его способность генерировать заряд при движении. Они также оптимизировали режимы нагрева в процессе печати, чтобы материал кристаллизовался в наиболее отзывчивой форме. Тесты показали, что сенсор выдает относительно большие и стабильные электрические сигналы, а его характеристики сохраняются даже после тысяч циклов изгиба — важное свойство для устройства, предназначенного для ношения на подвижных пальцах или роботизированных захватах.
Чувствовать скольжение на воде и масле
Главным испытанием было, сможет ли кончик пальца фиксировать скольжение по мокрой поверхности. Смонтированный на искусственном пальце сенсор проводили по нержавеющей стальной пластине в трех условиях: полностью сухой, покрытой водой и покрытой маслом. В каждом случае рифления отпечатка генерировали регулярные волнообразные паттерны напряжения, связанные с классическим поведением «прилипание–скольжение», когда поверхность поочередно захватывает и отпускает. Критически важно, что узорчатый сенсор давал четкие, сильные сигналы даже при снижении трения из‑за масла, тогда как в противном случае идентичный, но гладкий сенсор в тех же условиях в значительной степени не справлялся. Канавки действовали как каналы, отталкивающие жидкость и восстанавливающие достаточный контакт для возникновения полезных вибраций. Устройство также фиксировало тонкие различия сигналов при скольжении по таким материалам, как керамика, стекло и ткань, что указывает на его способность распознавать не только скольжение, но и тип поверхности.
Обучение ИИ распознавать ощущения кончика пальца
Поскольку сенсор выдавал богатые потоки данных, исследователи связали его с программным обеспечением машинного обучения, которое автоматически распознает тип поверхности, к которой прикасался сенсор. Они извлекали простые числовые признаки из каждого сигнала скольжения — например, насколько он силен и как быстро колеблется — и обучили модель отличать нержавеющую сталь от керамики, стекла или нетканого полотна в сухих, влажных водных и масляных условиях. С применением методов перекрестной проверки для предотвращения переобучения система правильно маркировала более 95 процентов тестовых образцов в каждой настройке и почти все образцы при смешанных условиях. В финальной демонстрации сенсор был прикреплен в виде электронной кожи к мягкой роботизированной руке, которая захватывала обычные продукты питания — огурцы, картофель и морковь. Даже когда эти предметы были смазаны маслом, система могла в реальном времени отслеживать соскальзывание, анализируя характерные паттерны вибраций.
От искусственных кончиков пальцев к цифровому осязанию
Проще говоря, эта работа показывает, что копирование структуры человеческих отпечатков в сочетании с умными материалами и ИИ может наделить машины удивительно «человеческим» ощущением момента, когда предметы собираются соскользнуть — будь то сухие, влажные или масляные поверхности. Поскольку сенсор можно печатать, сгибать и оборачивать вокруг пальцев или захватов, он хорошо подходит для будущих протезов, коллаборативных роботов и других устройств, которым предстоит работать с хрупкими, грязными или непредсказуемыми предметами. По мере того как все больше тактильных сигналов превращается в цифровые данные и автоматически анализируется, наше физическое чувство осязания может получить отражение в киберпространстве, способствуя будущему, в котором роботы и люди будут взаимодействовать более безопасно и без трений с окружным скользким миром.
Цитирование: Adachi, T., Ozawa, K., Kamanoi, S. et al. AI-integrated bionic fingertip E-Skin for precision slippage detection in wet environments. Sci Rep 16, 14179 (2026). https://doi.org/10.1038/s41598-026-41096-z
Ключевые слова: электронная кожа, роботическое осязание, обнаружение скольжения, мягкая робототехника, тактильное сенсирование