Clear Sky Science · sv
AI-integrerad bionisk fingertopp E-Skin för precis upptäckt av slirning i våta miljöer
Smart beröring för ett halt vardagsliv
Den som har tappat ett vått glas eller haft svårt att hålla i ett oljat köksredskap vet hur knepiga hala föremål kan vara. Människor klarar det oftast tack vare fingertoppens otroliga känslighet, som uppfattar små vibrationer just innan något glider ur greppet. Denna studie beskriver en konstgjord fingertopp—en "hud"—som ger robotar och proteshänder en liknande förfinad känsel även när föremål är täckta av vatten eller olja, och öppnar därigenom möjligheter för säkrare, mer smidiga maskiner i kök, fabriker, sjukhus och hem.
Varför robotar behöver bättre slirkänsla
Moderna elektroniska hudmaterial låter redan maskiner känna tryck, temperatur och till och med luftfuktighet. Men att pålitligt uppfatta när ett föremål är på väg att glida, särskilt under våta eller feta förhållanden, har förblivit en betydande blind fläck. För robotar som förbereder mat, tvättar verktyg eller hanterar ömtåliga föremål i verkliga miljöer är detta en allvarlig begränsning: ett säkert grepp måste vara tillräckligt fast för att hindra fall men tillräckligt försiktigt för att inte krossa eller skada föremålet. Författarna ville bygga en bärbar fingertoppssensor som kan upptäcka början på glidning under alla ytförhållanden—torrt, vattenvått eller oljat—samtidigt som den är flexibel, lätt och tillräckligt billig för bred användning.

Fingeravtryck som designmodell
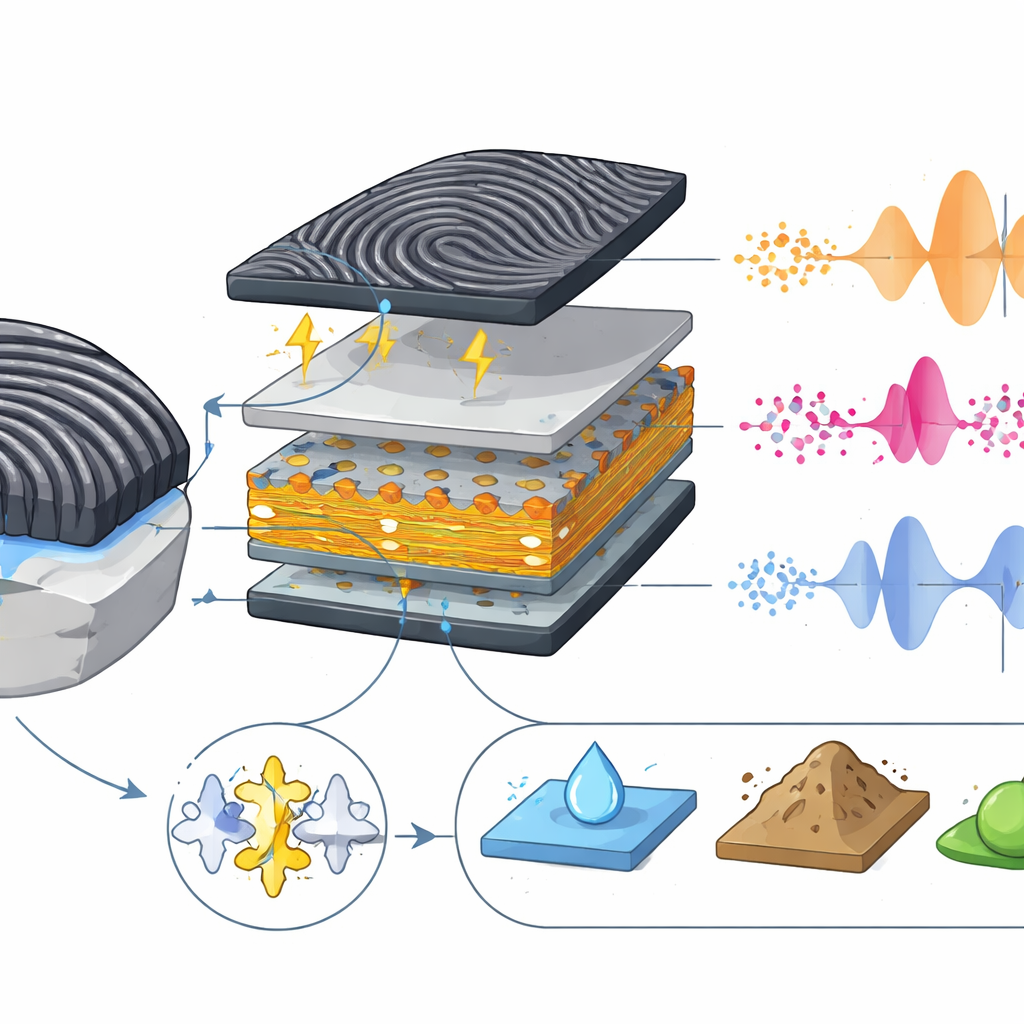
Teamet hämtade direkt inspiration från människans fingertopp, vars räfflade fingeravtryck påverkar hur vibrationer färdas genom huden. De framställde en flerskikts elektronisk film med hjälp av helskärmstryckmetoder, en teknik väl lämpad för lågkostnadsmasstillverkning. Kärnan i enheten är ett tunt skikt av en särskild plast som genererar elektriska laddningar när det böjs eller vibrerar. Ovanpå detta lade de ett mjukt gummiskikt vars yta skars med ett slumpmässigt, fingeravtryckslikt mönster med en koldioxidlaser. När denna mönstrade yta glider över ett annat material hakar räfflorna upp sig och släpper upprepade gånger, vilket skapar små vibrationsexplosioner som det inre sensorskiktet omvandlar till voltagesignaler.
Att förstärka en svag signal och göra den hållbar
För att säkerställa att dessa vibrationssignaler skulle vara starka och pålitliga blandade forskarna in en liten mängd kolnanorör—nanometerstora rör av kol—i det aktiva plastskiktet. Denna subtila förändring förbättrade hur väl molekylerna i skiktet ordnade sig, vilket ökade dess förmåga att generera laddning vid rörelse. De finjusterade också uppvärmningsstegen som används under tryckprocessen så att materialet skulle kristallisera i sin mest responsiva form. Tester visade att sensorn producerade relativt stora och stabila elektriska signaler, och att dess prestanda höll i sig även efter tusentals böjcykler—en viktig egenskap för en enhet avsedd att bäras på rörliga fingrar eller robotgrepp.
Känna slirning i vatten och olja
Det verkliga testet var om fingertoppen kunde uppfatta glidning på våta ytor. Monterad på ett konstgjort finger drogs sensorn över en plåt av rostfritt stål under tre förhållanden: helt torr, täckt av vatten och belagd med olja. I samtliga fall genererade fingeravtrycksräfflorna regelbundna, vågiga voltmönster kopplade till det klassiska "stick–slip"-beteendet som uppstår när en yta växelvis griper och släpper. Avgörande var att den mönstrade sensorn producerade klara, starka signaler även när olja minskade friktionen, medan en annars identisk men slät sensor till stor del misslyckades under samma förhållanden. Spåren fungerade som kanaler som trängde undan vätska och återställde tillräcklig kontakt för att ge användbara vibrationer. Enheten fångade också subtila skillnader i signaler vid glidning över material som keramik, glas och tyg, vilket antyder dess förmåga att känna igen inte bara slirning utan också yttyp.
Lära AI att känna vad fingertoppen upplever
Eftersom sensorn levererar rika datastreamar kopplade forskarna den till maskininlärningsprogramvara som automatiskt kunde identifiera vilken typ av yta den rörde vid. De extraherade enkla numeriska egenskaper ur varje slirningssignal—såsom hur stark och hur snabbt den varierade—och tränade en modell att skilja rostfritt stål från keramik, glas eller non-woven-tyg under torra, vattenvåta och oljevåta förhållanden. Genom korsvalideringsmetoder för att undvika överanpassning märkte systemet korrekt mer än 95 procent av testfallen i varje miljö, och nästan alla prover när alla förhållanden blandades. I en slutlig demonstration fästes sensorn som elektronisk hud på en mjuk robothand som greppade vardagliga livsmedel som gurkor, potatis och morötter. Även när dessa föremål var oljade kunde systemet fortfarande följa slirning i realtid genom att analysera de karakteristiska vibrationsmönstren.
Från konstgjorda fingertoppar till digital beröring
Enkelt uttryckt visar detta arbete att kopiering av människans fingeravtrycksstruktur kombinerat med smarta material och AI kan ge maskiner en anmärkningsvärt människolik förmåga att känna när saker är på väg att glida—oavsett om de är torra, våta eller oljiga. Eftersom sensorn kan tryckas, böjas och lindas runt fingrar eller grepp är den väl lämpad för framtida proteshänder, kollaborativa robotar och andra enheter som måste hantera sköra, stökiga eller oförutsägbara föremål. När fler av dessa taktila signaler omvandlas till digital data och analyseras automatiskt kan vår fysiska känsel av beröring speglas i cyberspace, vilket understöder en framtid där robotar och människor interagerar säkrare och mer sömlöst med den haliga värld som omger oss.
Citering: Adachi, T., Ozawa, K., Kamanoi, S. et al. AI-integrated bionic fingertip E-Skin for precision slippage detection in wet environments. Sci Rep 16, 14179 (2026). https://doi.org/10.1038/s41598-026-41096-z
Nyckelord: elektronisk hud, robotiskt beröring, slirningsdetektion, mjukrobotik, taktil sensning