Clear Sky Science · nl
AI-geïntegreerde bionische vingertip E-Skin voor nauwkeurige slipdetectie in natte omgevingen
Slimme aanraking voor het gladde alledaagse leven
Wie wel eens een nat glas heeft laten vallen of moeite heeft gehad een vette kooklepel vast te houden, weet hoe lastig gladde voorwerpen kunnen zijn. Mensen redden zich meestal dankzij de ongelooflijke gevoeligheid van onze vingertoppen, die kleine trillingen voelen net voordat iets wegglijdt. Deze studie beschrijft een kunstmatige vingertip-“huid” die robots en prothetische handen een vergelijkbaar verfijnd gevoel voor aanraking geeft — zelfs wanneer voorwerpen met water of olie zijn bedekt — en zo de weg vrijmaakt voor veiligere, wendbaardere machines in keukens, fabrieken, ziekenhuizen en huizen.
Waarom robots een beter slipgevoel nodig hebben
Moderne elektronische huiden laten machines al druk, temperatuur en zelfs vochtigheid voelen. Maar betrouwbaar waarnemen wanneer een voorwerp op het punt staat te verschuiven, vooral onder natte of vette omstandigheden, bleef een blinde vlek. Voor robots die voedsel bereiden, gereedschap wassen of delicate objecten in de echte wereld hanteren, is dat een ernstige beperking: een veilige greep moet stevig genoeg zijn om te voorkomen dat iets valt, maar zacht genoeg om het niet te pletten of te beschadigen. De auteurs stelden zich ten doel een draagbare vingertip-sensor te ontwikkelen die het begin van glijden kan detecteren onder elke oppervlakteconditie — droog, nat met water of bedekt met olie — en tegelijk flexibel, lichtgewicht en goedkoop genoeg is voor brede toepassing.

Vingerafdrukken als ontwerpsjabloon
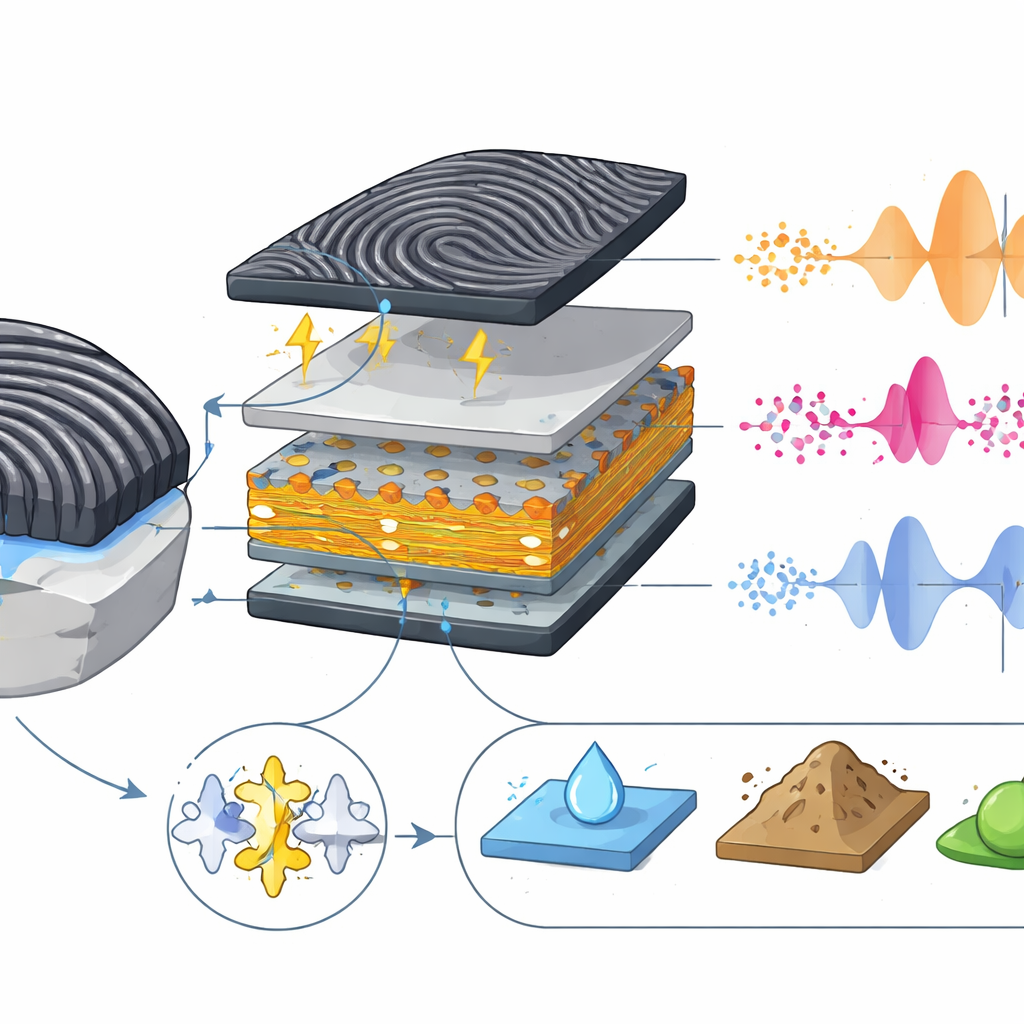
Het team liet zich rechtstreeks inspireren door de menselijke vingertop, wiens geribbelde vingerafdrukken helpen bepalen hoe trillingen zich door de huid voortplanten. Ze vervaardigden een meerlagige elektronische film met volledig zeefdrukmethoden, een techniek die zich goed leent voor goedkope massaproductie. De kern van het apparaat is een dunne laag van een speciaal kunststof die elektrische ladingen genereert wanneer deze wordt gebogen of getrild. Daarboven plaatsten ze een zachte rubberen laag waarvan het oppervlak met een CO2-laser was gegraveerd in een willekeurig, vingerafdrukachtig patroon. Wanneer dit geprofileerde oppervlak langs een ander materiaal schuift, hechten en lossen de richels herhaaldelijk, waardoor kleine trillingsexplosies ontstaan die de binnenste sensorlaag omzet in voltagesignalen.
Een klein signaal luid en duurzaam maken
Om ervoor te zorgen dat deze trillingstekens sterk en betrouwbaar zouden zijn, voegden de onderzoekers een kleine hoeveelheid koolstofnanobuisjes — nanometerlange buisjes van koolstof — toe aan het actieve kunststof. Deze subtiele wijziging verbeterde de ordening van de moleculen in de laag, waardoor de capaciteit om lading op te wekken bij beweging toenam. Ze verfijnden ook de verwarmingsstappen tijdens het printen zodat het materiaal in zijn meest responsieve kristallijne vorm zou ontstaan. Tests toonden aan dat de sensor relatief sterke en stabiele elektrische signalen produceerde, en dat de prestatie behouden bleef zelfs na duizenden buigcycli — een belangrijke eigenschap voor een apparaat dat gedragen wordt op bewegende vingers of robotgrijpers.
Slip voelen in water en olie
De echte test was of de vingertip glijden op natte oppervlakken kon waarnemen. Gemonteerd op een kunstmatige vinger, werd de sensor over een roestvrijstalen plaat getrokken onder drie omstandigheden: volledig droog, bedekt met water en met een olielaag. In alle gevallen genereerden de vingerafdrukrichels regelmatige, golfachtige voltagepatronen die verband houden met het klassieke "stick–slip"-gedrag dat optreedt wanneer een oppervlak afwisselend vastgrijpt en loslaat. Cruciaal was dat de geprofileerde sensor klare, sterke signalen produceerde zelfs wanneer olie de wrijving verminderde, terwijl een anders identieke maar gladde sensor grotendeels faalde onder dezelfde omstandigheden. De groeven fungeerden als kanalen die vloeistof opzij duwden en voldoende contact herstelden om bruikbare trillingen te produceren. Het apparaat ving ook subtiele verschillen in signalen op bij het schuiven over materialen zoals keramiek, glas en textiel, wat wijst op het vermogen niet alleen slip te herkennen, maar ook het oppervlaktype.
AI leren herkennen wat de vingertip voelt
Aangezien de sensor rijke datastromen oplevert, koppelden de onderzoekers hem aan machine-learningsoftware die automatisch kon bepalen welk type oppervlak werd aangeraakt. Ze haalden eenvoudige numerieke kenmerken uit elk slip-signaal — zoals hoe sterk en hoe snel het fluctueerde — en trainden een model om roestvrij staal te onderscheiden van keramiek, glas of non-woven stof onder droge, met water bevochtigde en met olie vervuilde condities. Met kruisvalidatiemethoden om overfitting te voorkomen labelde het systeem meer dan 95 procent van de testgevallen correct in elke setting, en bijna alle monsters wanneer alle condities door elkaar werden gebruikt. In een laatste demonstratie werd de sensor als elektronische huid bevestigd aan een zachte robothand die alledaagse voedingsmiddelen zoals komkommers, aardappels en wortels greep. Zelfs wanneer deze objecten geolied waren, kon het systeem glijden in realtime volgen door de karakteristieke trillingpatronen te analyseren.
Van kunstmatige vingertoppen tot digitale aanraking
In eenvoudige bewoordingen toont dit werk aan dat het kopiëren van de structuur van menselijke vingerafdrukken en het combineren ervan met slimme materialen en AI machines een opmerkelijk mensachtig gevoel kan geven voor wanneer iets op het punt staat te slippen — of het nu droog, nat of vettig is. Omdat de sensor geprint, gebogen en om vingers of grijpers gewikkeld kan worden, is hij goed geschikt voor toekomstige prothetische handen, collaboratieve robots en andere apparaten die fragiele, rommelige of onvoorspelbare objecten moeten hanteren. Naarmate meer van deze tactiele signalen in digitale data worden omgezet en automatisch geanalyseerd, kan ons fysieke gevoel voor aanraking in cyberspace worden weerspiegeld, wat een toekomst ondersteunt waarin robots en mensen veiliger en naadlozer omgaan met de gladde wereld om ons heen.
Bronvermelding: Adachi, T., Ozawa, K., Kamanoi, S. et al. AI-integrated bionic fingertip E-Skin for precision slippage detection in wet environments. Sci Rep 16, 14179 (2026). https://doi.org/10.1038/s41598-026-41096-z
Trefwoorden: elektronische huid, robotische aanraking, slipdetectie, zachte robotica, tactiele sensoring