Clear Sky Science · es
Punta de dedo biónica con E-piel integrada en IA para detección precisa de deslizamiento en entornos húmedos
Tacto inteligente para la vida cotidiana resbaladiza
Cualquiera que haya dejado caer un vaso mojado o haya tenido dificultades para sujetar un utensilio de cocina aceitoso sabe lo complicados que pueden ser los objetos resbaladizos. Los humanos suelen arreglárselas gracias a la increíble sensibilidad de las yemas de los dedos, que perciben pequeñas vibraciones justo antes de que algo se deslice. Este estudio describe una "piel" artificial para la punta del dedo que otorga a robots y manos protésicas un sentido del tacto igualmente refinado —incluso cuando los objetos están cubiertos de agua o aceite—, abriendo la puerta a máquinas más seguras y ágiles en cocinas, fábricas, hospitales y hogares.
Por qué los robots necesitan un mejor sentido del deslizamiento
Las pieles electrónicas modernas ya permiten a las máquinas sentir presión, temperatura e incluso humedad. Pero detectar con fiabilidad cuándo un objeto está a punto de deslizarse, especialmente en condiciones húmedas o grasientas, sigue siendo un gran punto ciego. Para robots que preparan alimentos, lavan herramientas o manipulan objetos delicados en el mundo real, esto es una limitación seria: una sujeción segura debe ser lo bastante firme para evitar que se caiga un objeto pero lo bastante suave para no aplastarlo o dañarlo. Los autores se propusieron construir un sensor wearable para la punta del dedo que pueda detectar el inicio del deslizamiento bajo cualquier condición de superficie —seco, húmedo con agua o recubierto de aceite—, siendo además flexible, ligero y lo bastante barato para uso generalizado.

Las huellas dactilares como plano de diseño
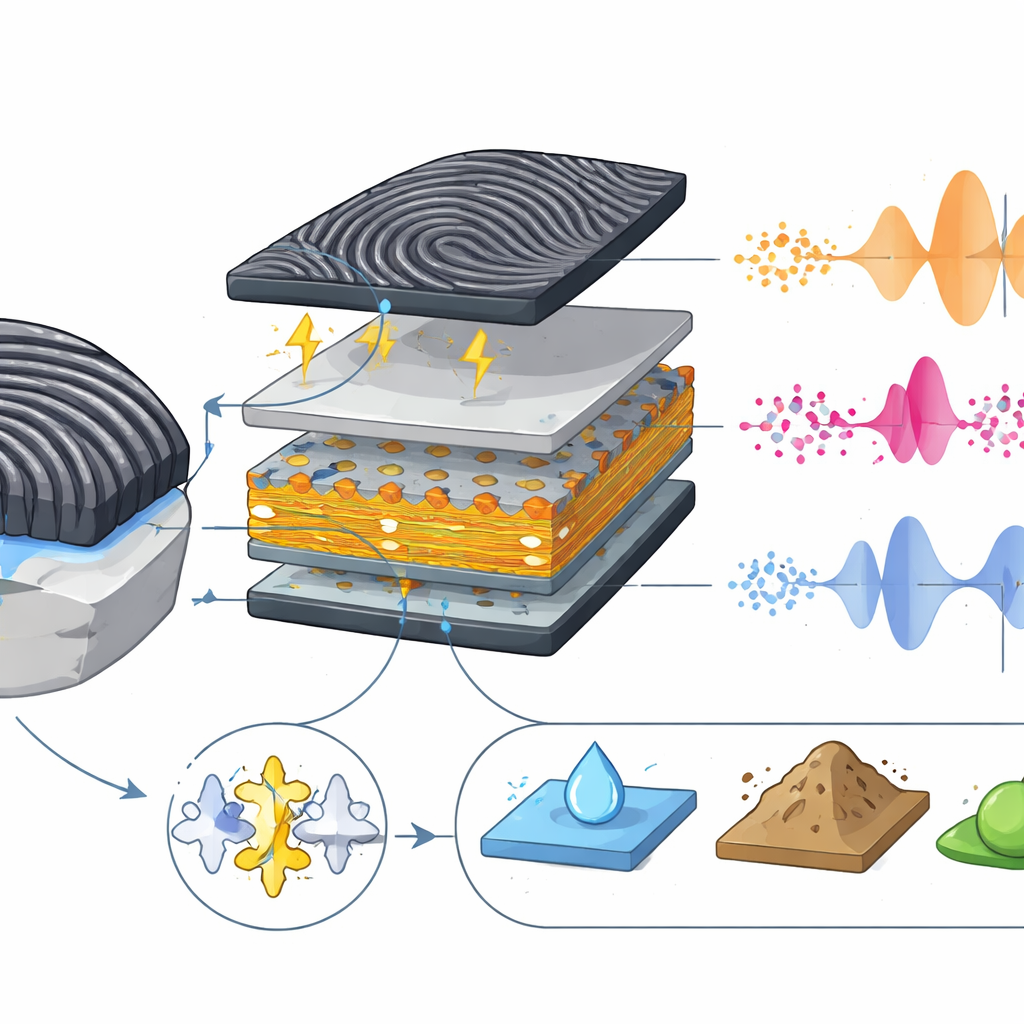
El equipo se inspiró directamente en la yema humana, cuyas crestas de las huellas ayudan a modular cómo viajan las vibraciones por la piel. Fabricaron una película electrónica multicapa mediante métodos de serigrafía por pantalla completos, una técnica adecuada para la producción masiva y de bajo coste. El núcleo del dispositivo es una capa delgada de un plástico especial que genera cargas eléctricas cuando se dobla o vibra. Sobre esta, añadieron una capa de caucho blando cuya superficie se grabó con un patrón aleatorio parecido a las huellas mediante un láser de dióxido de carbono. Cuando esta superficie ranurada se desliza sobre otro material, las crestas se adhieren y sueltan repetidamente, creando pequeños estallidos de vibración que la capa sensora interna convierte en señales de voltaje.
Hacer una señal diminuta fuerte y duradera
Para asegurar que estas señales de vibración fuesen potentes y fiables, los investigadores mezclaron una pequeña cantidad de nanotubos de carbono —tubos de carbono a escala nanométrica— en el plástico activo. Este cambio sutil mejoró el ordenamiento molecular en la capa, potenciando su capacidad de generar carga al moverse. También afinaron los pasos de calentamiento empleados durante la impresión para que el material cristalizara en su forma más sensible. Las pruebas mostraron que el sensor producía señales eléctricas relativamente grandes y estables, y que su rendimiento se mantenía incluso tras miles de ciclos de flexión, una característica clave para un dispositivo pensado para llevarse en dedos móviles o en pinzas robóticas.
Sensar el deslizamiento en agua y aceite
La prueba real fue si la punta del dedo podía detectar el deslizamiento en superficies húmedas. Montado en un dedo artificial, el sensor se deslizó sobre una placa de acero inoxidable en tres condiciones: completamente seca, cubierta de agua y recubierta de aceite. En todos los casos, las crestas de la huella generaron patrones de voltaje regulares, ondulatorios, vinculados al clásico comportamiento de "agarre y deslizamiento" (stick–slip) que ocurre cuando una superficie alterna entre adherirse y soltarse. De manera crucial, el sensor con patrón produjo señales claras y fuertes incluso cuando el aceite reducía la fricción, mientras que un sensor idéntico pero liso falló en gran medida bajo las mismas condiciones. Las ranuras actuaban como canales que desplazaban el líquido y restauraban el contacto suficiente para producir vibraciones utilizables. El dispositivo también capturó diferencias sutiles en las señales al deslizarse sobre materiales como cerámica, vidrio y tejido, lo que sugiere su capacidad no solo para detectar deslizamiento, sino también el tipo de superficie.
Enseñar a la IA a reconocer lo que siente la punta del dedo
Dado que el sensor genera flujos de datos ricos, los investigadores lo combinaron con software de aprendizaje automático que podía identificar automáticamente el tipo de superficie que tocaba. Extrajeron características numéricas simples de cada señal de deslizamiento —como cuán intensa y cuán rápida era su fluctuación— y entrenaron un modelo para distinguir acero inoxidable de cerámica, vidrio o tejido no tejido en condiciones secas, húmedas con agua y húmedas con aceite. Usando métodos de validación cruzada para evitar el sobreajuste, el sistema etiquetó correctamente más del 95 por ciento de los casos de prueba en cada escenario, y casi todas las muestras cuando se mezclaron todas las condiciones. En una demostración final, el sensor se adhirió como piel electrónica a una mano robótica blanda que sujetó alimentos cotidianos como pepinos, patatas y zanahorias. Incluso cuando estos objetos estaban engrasados, el sistema pudo rastrear el deslizamiento en tiempo real analizando los patrones de vibración característicos.
De las puntas de los dedos artificiales al tacto digital
En términos sencillos, este trabajo demuestra que copiar la estructura de las huellas humanas y combinarla con materiales inteligentes e IA puede dar a las máquinas un sentido sorprendentemente humano de cuándo las cosas están a punto de resbalar —seco, húmedo o aceitoso. Como el sensor puede imprimirse, doblarse y envolverse alrededor de dedos o pinzas, es muy adecuado para futuras manos protésicas, robots colaborativos y otros dispositivos que deben manipular objetos frágiles, sucios o impredecibles. A medida que más de estas señales táctiles se conviertan en datos digitales y se analicen automáticamente, nuestro sentido físico del tacto podría reflejarse en el ciberespacio, apoyando un futuro en el que robots y humanos interactúen de forma más segura y fluida con el mundo resbaladizo que nos rodea.
Cita: Adachi, T., Ozawa, K., Kamanoi, S. et al. AI-integrated bionic fingertip E-Skin for precision slippage detection in wet environments. Sci Rep 16, 14179 (2026). https://doi.org/10.1038/s41598-026-41096-z
Palabras clave: piel electrónica, tacto robótico, detección de deslizamiento, robótica blanda, sensado táctil