Clear Sky Science · zh
新型全向软套袖执行器的设计、制造与测试
为什么软体机器人套袖重要
想象一个未来:一件轻质、织物状的套袖悄无声息地帮助某人弯曲僵硬的肘部、稳住外科医生的手,或在没有笨重金属框架和响亮电机的情况下引导工人的手臂。本文介绍了这样一款装置:一种软性、气动的套袖,能够在肢体周围伸长、缩短并朝任意方向弯曲,为舒适的可穿戴机器人和辅助设备开辟了新可能。
从刚性机器到温和帮手
传统机器人依赖坚硬的金属部件和电机,虽然动力强大,但直接置于人体上时可能不安全或不舒适。在过去十年里,软体机器人走出了一条不同的道路,采用柔性材料和气压来产生更类似肌肉与肌腱的运动。然而,许多软执行器只能在一到两个方向运动,或需要高气压和复杂结构,难以穿戴。作者们着手设计一种紧凑的、袖状的执行器,能够环绕关节、贴合身体并在相对较低的压力下仍产生强劲且可精确控制的多方向运动。
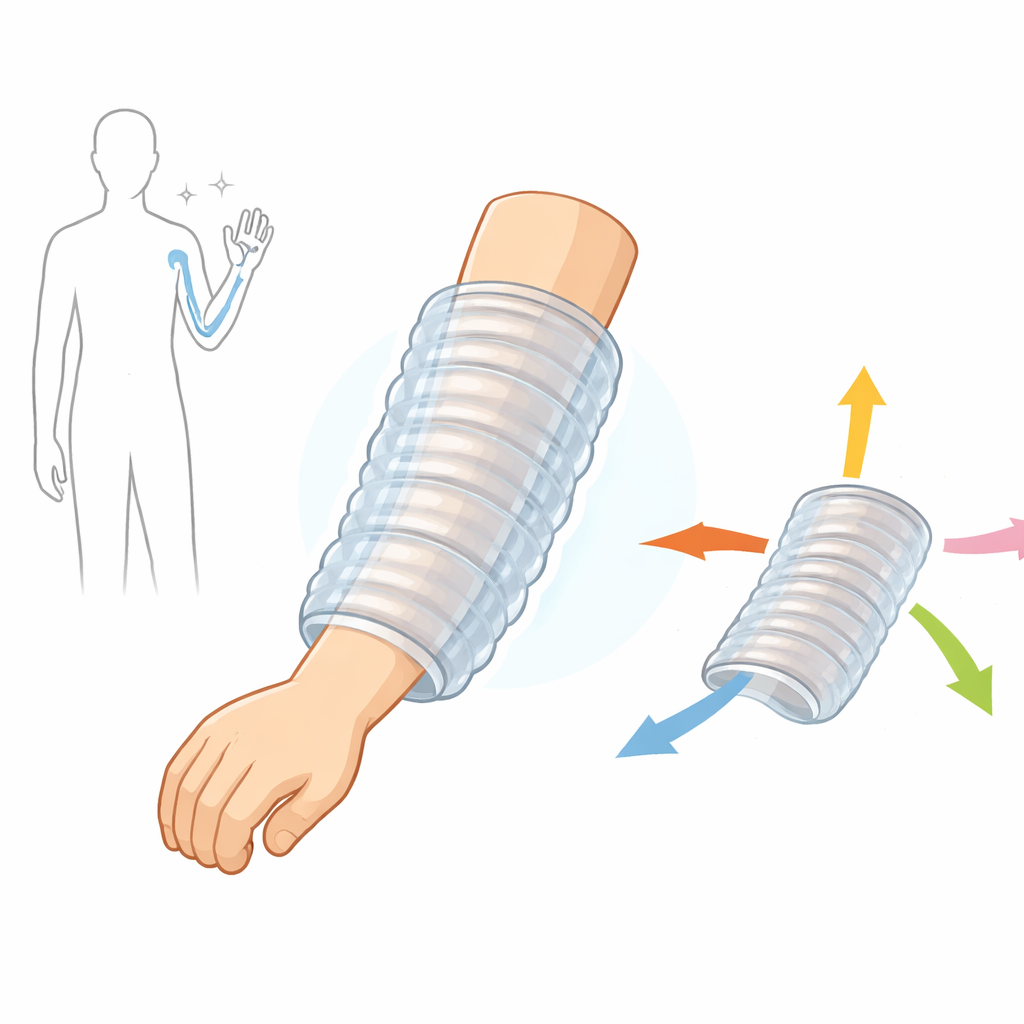
像象鼻一样运动的新型套袖
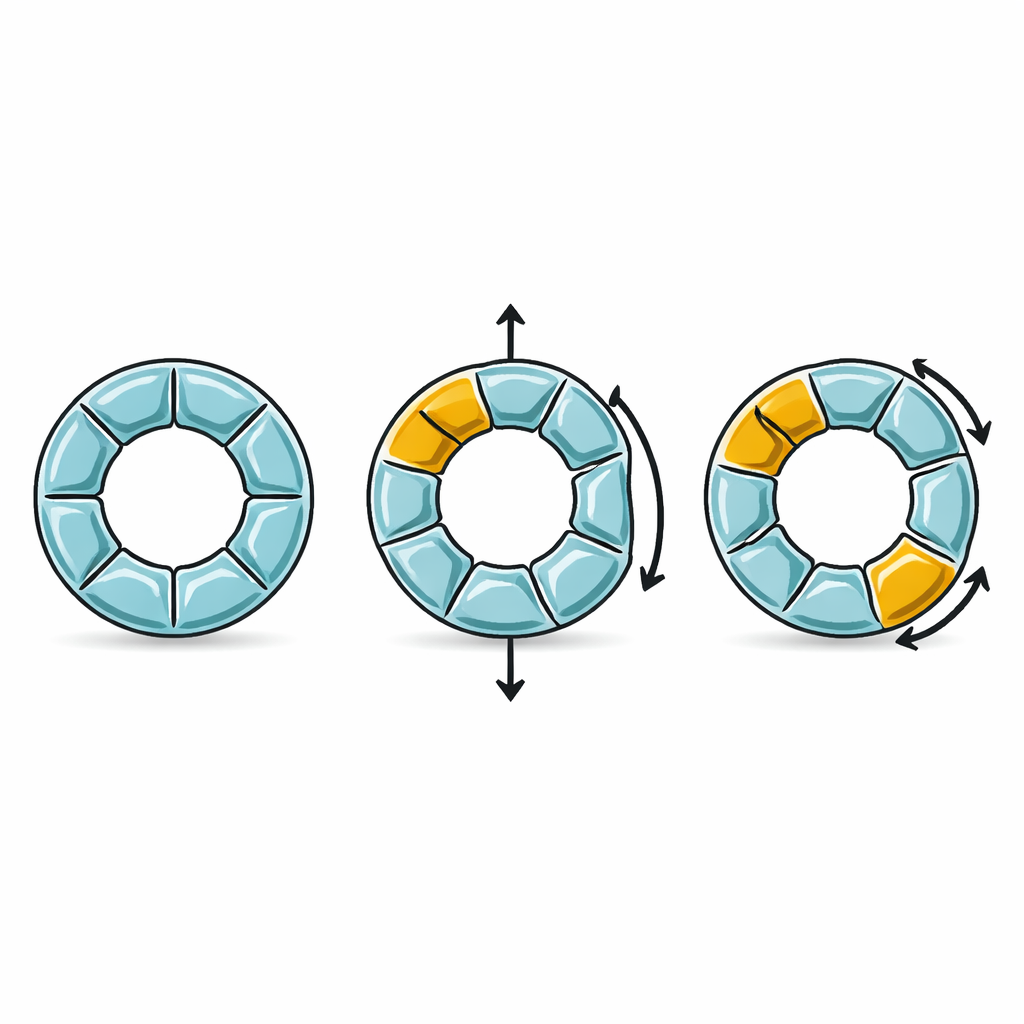
这里介绍的装置称为全向软套袖执行器,其灵感来自大象鼻子的灵活性。它呈空心有肋的管状外观,可套在肢体或机器人关节上。在管壁内部沿周向布置了四个独立气室,形成类似风琴褶皱的 V 形折叠。通过独立调节各气室的气压,套袖可以伸长、在真空下主动缩短,或朝任意一侧弯曲。当四个气室气压相等时套袖会变长;对称降低气压会使其收缩;在两侧制造压力差会使其朝较软、气压较低的一侧弯曲。因此,这一单一结构无需刚性框架或外部约束层即可提供多种运动形式。
精心设计与 3D 打印如何使之可行
要实现如此多样的运动,需要对套袖的几何形状和材料进行精细调校。研究人员对比了不同的壁形和支撑策略,发现由柔性热塑性聚氨酯制成、并由纵向“系带”层增强的折叠风琴结构,在强度与柔韧性之间提供了最佳组合。他们系统地改变了折皱宽度、折角、壁厚以及系带层的数量和厚度等特征。例如,较宽的折皱允许更大的伸长,而较小的折角能提升力输出但会增加刚性。他们还发现,使用更软的材料能显著改善弯曲范围和冲程。为可靠制造这些精细形状,团队为 Bowden 型打印机制定了详细的柔性塑料 3D 打印配方,解决了湿度控制、喷嘴堵塞、支撑移除和打印温度等挑战。该工艺产生了气密的壁体和可重复的零件,适合大规模制造。
测试揭示的运动与强度
作者使用带精密传感器和压力调节器的定制测试平台,测量了套袖的推拉和弯曲能力。在 130 千帕的适中压力下—低于许多现有软执行器—套袖可产生高达 60 牛顿的轴向力,足以对关节运动提供显著辅助,并能伸长约 81 毫米,同时在真空下可主动收缩 25 毫米。在弯曲方面,它可达 45 度的角度并产生 18 牛顿的弯曲力。这些结果与其他全向软执行器相比具有优势:后者常常需要更高的压力才能产生更小的力,并且无法主动收缩。团队还证明了其 3D 打印方法能在多次打印间得到几乎相同的执行器,并且在反馈控制下,套袖可实现亚毫米级的目标位置跟踪,并在低到中等的运动频率下可靠响应。
这对未来可穿戴机器人的意义
对非专业读者而言,核心结论是:这项工作将软性、环绕式“肌肉套袖”的概念转化为实用且经过测试的技术。通过将巧妙的内部风琴设计与精心工程化的 3D 打印工艺结合,研究人员创造出一种单一、轻量的装置,能够在多方向弯曲、伸长并主动回拉,且运行所需气压相对较低。由于它是空心并设计为环绕肢体或关节,它对可穿戴机器人外骨骼、医疗支具和康复工具尤其有前景,这类设备必须安全、舒适且紧凑。未来工作将改进套袖与人体的贴合,加入内置传感与更智能的控制,并将其与可扭转的套袖相结合,以实现更逼真、象鼻般的运动,用于日常的机器人辅助。
引用: Abboodi, M., Doumit, M. Design, manufacturing, and testing of a novel omnidirectional soft sleeve actuator. Sci Rep 16, 9828 (2026). https://doi.org/10.1038/s41598-026-40604-5
关键词: 软体机器人, 可穿戴外骨骼, 气动执行器, 3D 打印 TPU, 辅助装置