Clear Sky Science · pl
Projektowanie, wytwarzanie i testowanie nowego, wielokierunkowego miękkiego aktuatora w formie rękawa
Dlaczego miękki robotyczny rękaw ma znaczenie
Wyobraź sobie przyszłość, w której lekki, przypominający tkaninę rękaw cicho pomaga komuś zgiąć sztywny łokieć, ustabilizować rękę chirurga lub poprowadzić ramię pracownika fabryki – bez masywnych metalowych ram czy głośnych silników. Artykuł przedstawia właśnie takie urządzenie: miękki, napędzany powietrzem rękaw, który może wydłużać się, skracać i zginać w dowolnym kierunku wokół kończyny, otwierając nowe możliwości dla wygodnych robotów noszonych i urządzeń wspomagających.
Od sztywnych maszyn do delikatnych pomocników
Tradycyjne roboty opierają się na twardych częściach metalowych i silnikach elektrycznych, które są wydajne, ale mogą być niebezpieczne lub niewygodne przy kontakcie z ciałem człowieka. W ciągu ostatniej dekady miękka robotyka obrała inną ścieżkę, wykorzystując elastyczne materiały i ciśnienie powietrza do uzyskania ruchu bardziej przypominającego mięśnie i ścięgna. Wiele miękkich aktuatorów jednak porusza się tylko w jednym lub dwóch kierunkach albo wymaga wysokiego ciśnienia i złożonych struktur, co utrudnia ich noszenie. Autorzy postawili sobie za cel zaprojektowanie kompaktowego aktuatora w kształcie rękawa, który mógłby otaczać staw, pozostawać wygodny przy ciele i jednocześnie generować silny, precyzyjnie kontrolowany ruch w wielu kierunkach przy stosunkowo niskim ciśnieniu.
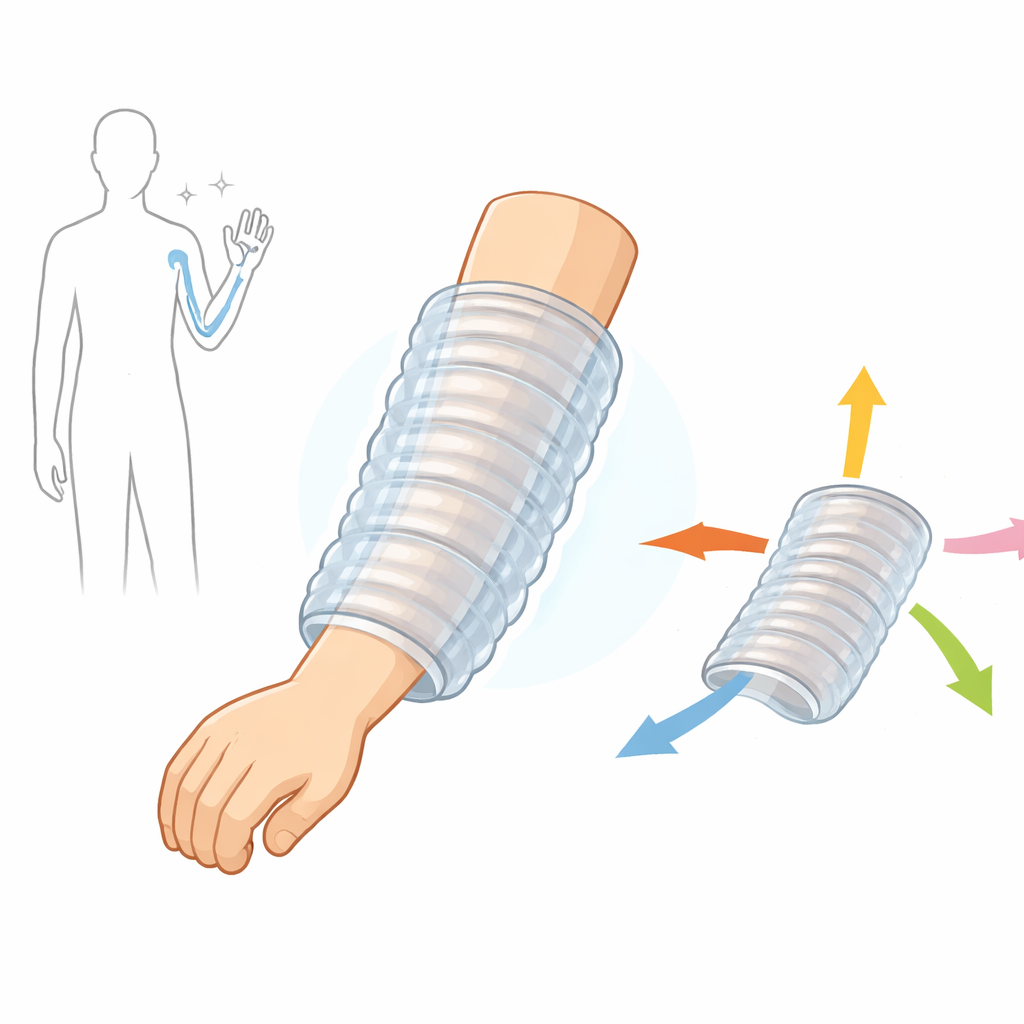
Nowy rękaw poruszający się jak trąba
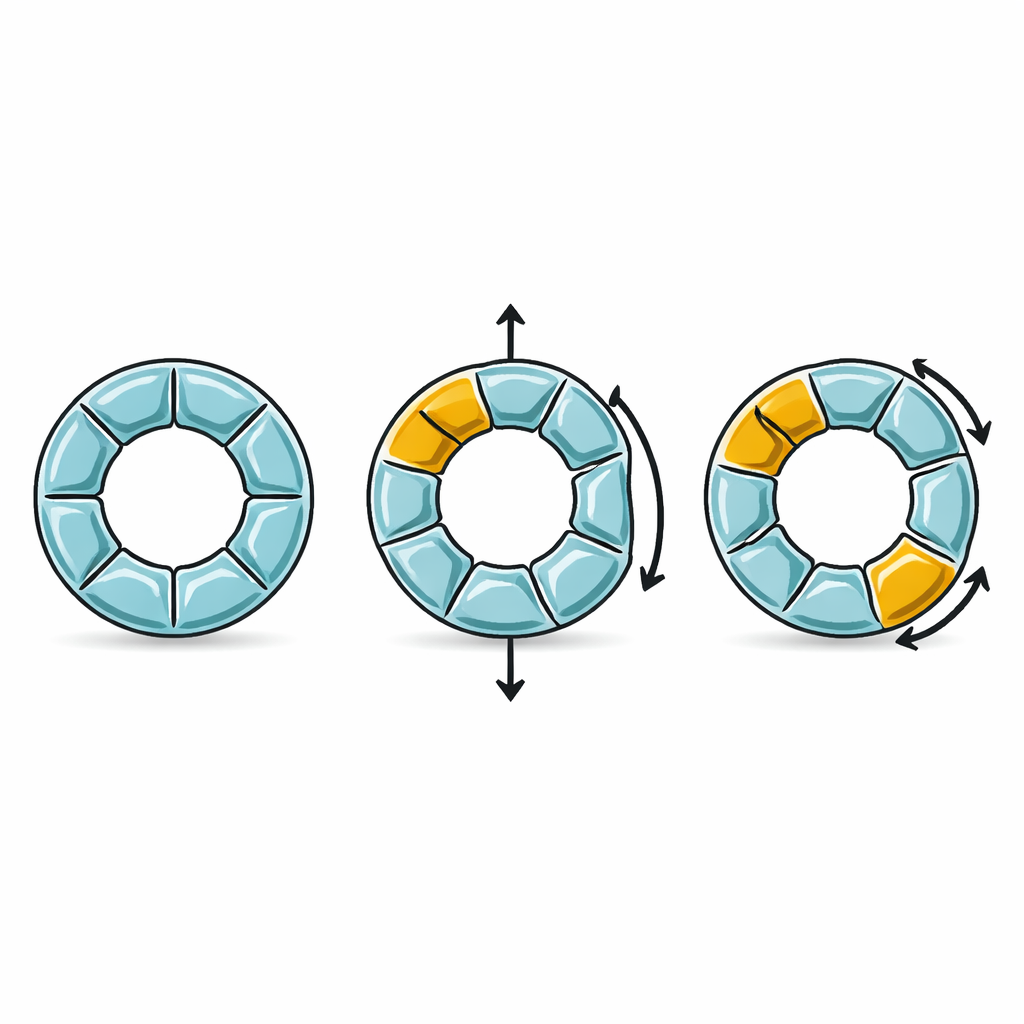
Urządzenie przedstawione tutaj, nazwane wielokierunkowym miękkim aktuátorem w formie rękawa, zostało zainspirowane zwinnością trąby słonia. Wygląda jak pusta, żeberkowana rura, którą można założyć na kończynę lub staw robota. W ściankach tej rury znajdują się cztery oddzielne komory powietrzne rozmieszczone wokół obwodu i ukształtowane w zagięcia przypominające literę V, podobne do harmonijki. Regulując ciśnienie powietrza w każdej komorze niezależnie, rękaw może wydłużać się, aktywnie skracać przy podciśnieniu lub zginać w dowolnym kierunku. Równomierne ciśnienie we wszystkich komorach powoduje wydłużenie; symetryczne obniżenie ciśnienia wywołuje skurcz; a różnica ciśnień między stronami sprawia, że rękaw zakrzywia się w stronę miększej, o niższym ciśnieniu, strony. Ta pojedyncza struktura zapewnia więc wiele rodzajów ruchu bez sztywnych ram czy zewnętrznych warstw ograniczających.
Jak staranny projekt i druk 3D to umożliwiają
Aby uzyskać tak wszechstronny ruch, trzeba było precyzyjnie dopracować geometrię i materiały rękawa. Badacze porównali różne kształty ścianek i strategie wzmocnień, stwierdzając, że składana harmonijka wykonana z elastycznego poliuretanu termoplastycznego, wzmocniona podłużnymi warstwami „wiązania”, zapewnia najlepsze połączenie wytrzymałości i elastyczności. Systematycznie zmieniali cechy takie jak szerokość fałdu, kąt zagięcia, grubość ścianki oraz liczbę i grubość warstw wiążących. Na przykład szersze fałdy pozwalały uzyskać większe wydłużenia, podczas gdy mniejsze kąty fałdowania poprawiały generowanie siły, ale zwiększały sztywność. Odkryli też, że użycie miększego materiału znacząco poprawia zarówno zakres zginania, jak i skok. Aby niezawodnie wytwarzać te skomplikowane kształty, zespół opracował szczegółowy przepis druku 3D dla elastycznego plastiku na drukarkach typu Bowden, rozwiązując problemy takie jak kontrola wilgotności, zapychanie dyszy, usuwanie podpór i temperatura druku. Proces ten dał szczelne ściany i powtarzalne elementy odpowiednie do produkcji na dużą skalę.
Co testy ujawniły o ruchu i wytrzymałości
Wykorzystując niestandardową platformę testową z precyzyjnymi czujnikami i regulatorami ciśnienia, autorzy zmierzyli, jak mocno i jak daleko rękaw potrafi pchać, ciągnąć i zginać. Przy umiarkowanym ciśnieniu 130 kilopaskali — niższym niż w wielu istniejących miękkich aktuatorach — rękaw wygenerował do 60 niutonów siły osiowej, co wystarcza, by znacząco wspomóc ruch stawu, oraz wydłużył się o około 81 milimetrów, jednocześnie mogąc skurczyć się o 25 milimetrów przy podciśnieniu. W zginaniu osiągnął kąty do 45 stopni i wygenerował 18 niutonów siły zginającej. Wyniki te wypadają korzystnie na tle innych wielokierunkowych miękkich aktuatorów, które często potrzebują znacznie wyższych ciśnień, by uzyskać mniejsze siły i nie potrafią aktywnie się skracać. Zespół pokazał też, że ich metoda druku 3D daje niemal identyczne aktuatory między kolejnymi wydrukami, oraz że przy sterowaniu sprzężeniem zwrotnym rękaw może śledzić zadane pozycje z submilimetrową dokładnością i reagować niezawodnie przy niskich do umiarkowanych częstotliwościach ruchu.
Co to oznacza dla przyszłych robotów noszonych
Dla osoby niezaznajomionej z tematem kluczowa informacja jest taka: praca ta przekształca pomysł miękkiego, otulającego „rękawa-mięśnia” w praktyczną, przetestowaną technologię. Łącząc sprytny wewnętrzny projekt harmonijki z starannie opracowanym procesem druku 3D, badacze stworzyli pojedyncze, lekkie urządzenie, które może zginać się w kilku kierunkach, wydłużać i aktywnie się cofać — wszystko przy stosunkowo niskim ciśnieniu powietrza. Ponieważ jest puste w środku i zaprojektowane tak, aby obejmować kończynę lub staw, ma szczególny potencjał w egzoszkieletach noszonych, podpórkach medycznych i narzędziach rehabilitacyjnych, które muszą być bezpieczne, wygodne i zwarte. Przyszłe prace będą dopracowywać dopasowanie rękawa do ciała ludzkiego, dodawać wbudowane sensory i inteligentniejsze sterowanie oraz łączyć go z rękawami skrętnymi, aby uzyskać jeszcze bardziej przypominający trąbę, żywy ruch dla codziennej pomocy robotycznej.
Cytowanie: Abboodi, M., Doumit, M. Design, manufacturing, and testing of a novel omnidirectional soft sleeve actuator. Sci Rep 16, 9828 (2026). https://doi.org/10.1038/s41598-026-40604-5
Słowa kluczowe: miękka robotyka, egzoszkielety noszone, aktuatory pneumatyczne, drukowane 3D TPU, urządzenia wspomagające