Clear Sky Science · pt
Projeto, fabricação e testes de um novo atuador de manga macia omnidirecional
Por que uma manga robótica macia importa
Imagine um futuro em que uma manga leve, semelhante a um tecido, ajuda discretamente alguém a dobrar um cotovelo rígido, estabilizar a mão de um cirurgião ou guiar o braço de um trabalhador de fábrica sem armações metálicas volumosas ou motores barulhentos. Este artigo apresenta exatamente esse dispositivo: uma manga macia acionada por ar que pode alongar, encurtar e dobrar em qualquer direção ao redor de um membro, abrindo novas possibilidades para robôs vestíveis confortáveis e dispositivos assistivos.
De máquinas rígidas a ajudantes suaves
Robôs tradicionais dependem de peças metálicas rígidas e motores elétricos, que são potentes, mas podem ser inseguros ou desconfortáveis quando colocados diretamente no corpo humano. Na última década, a robótica macia seguiu um caminho diferente, usando materiais flexíveis e pressão de ar para criar movimentos que imitam melhor músculos e tendões. Muitos atuadores macios, porém, movem-se apenas em uma ou duas direções ou exigem pressões de ar elevadas e estruturas complexas, tornando-os difíceis de vestir. Os autores propuseram projetar um atuador compacto em forma de manga que pudesse contornar uma articulação, permanecer confortável no corpo e ainda gerar movimento forte e precisamente controlado em várias direções com pressão relativamente baixa.
Uma nova manga que se move como uma tromba
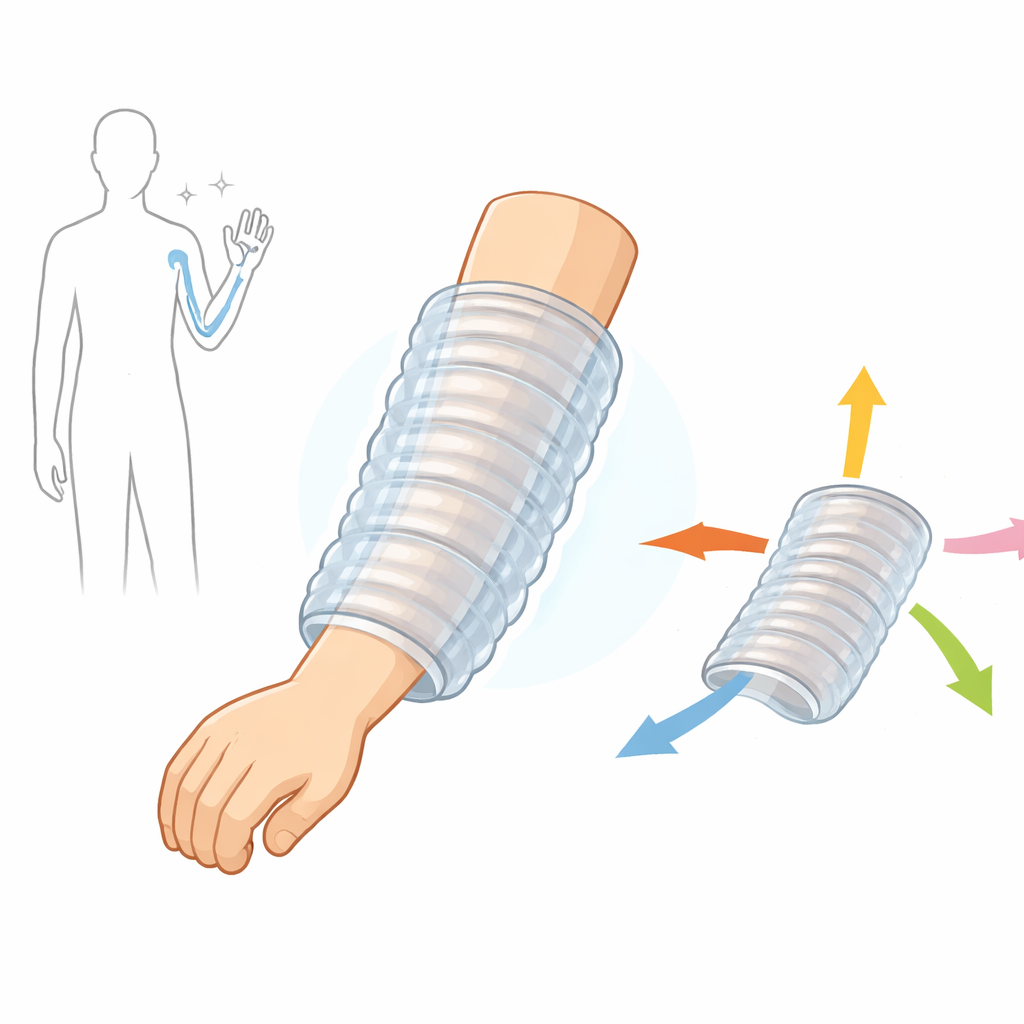
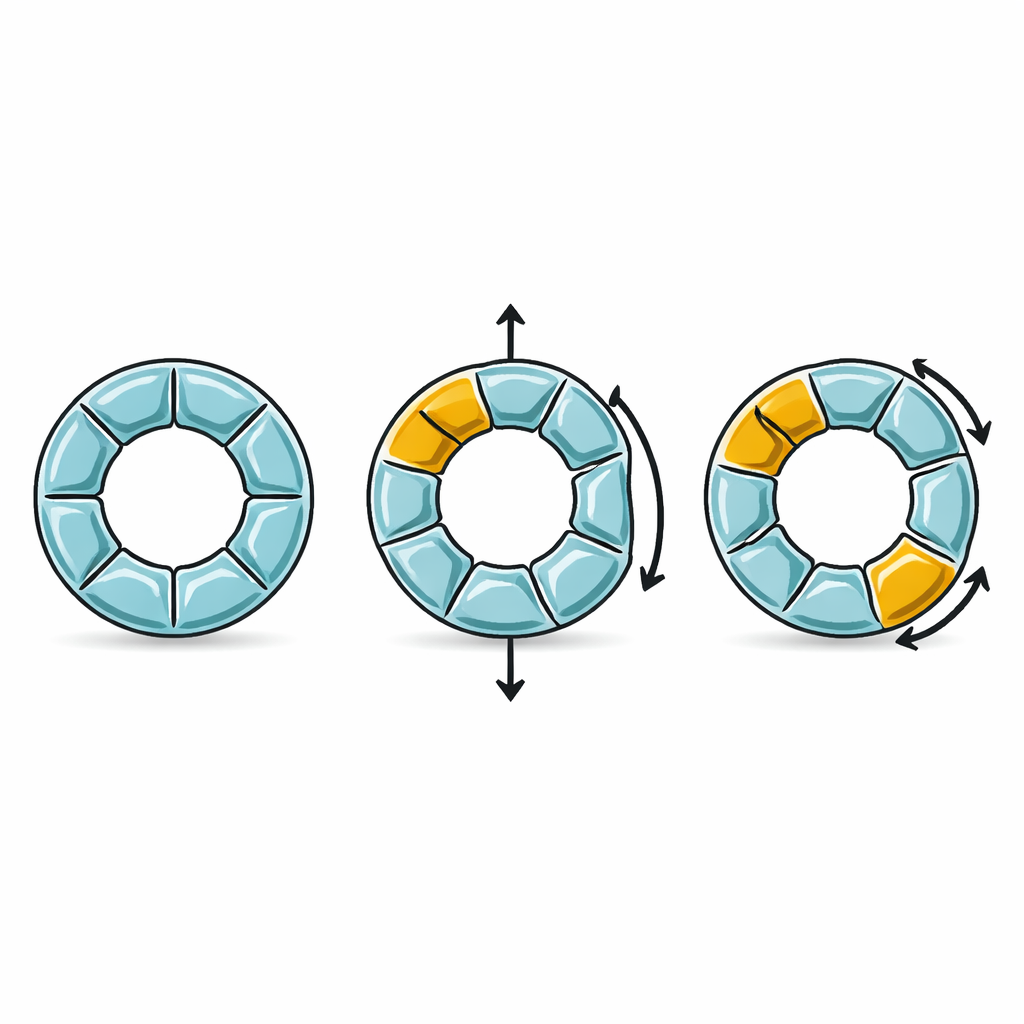
O dispositivo apresentado aqui, chamado atuador de manga macia omnidirecional, é inspirado na agilidade da tromba de um elefante. Parece um tubo oco e canelado que pode envolver um membro ou uma articulação robótica. Nas paredes desse tubo há quatro câmaras de ar separadas dispostas ao redor da circunferência e moldadas em dobras em formato de V, semelhantes a foles concertina. Ajustando a pressão do ar em cada câmara de forma independente, a manga pode estender-se, encurtar ativamente sob vácuo ou dobrar-se para qualquer lado. Pressão igual em todas as câmaras faz com que ela se alongue; reduzir a pressão simetricamente faz com que ela contraia; e criar uma diferença de pressão entre os lados a faz curvar-se em direção ao lado mais macio, de menor pressão. Essa estrutura única fornece, portanto, múltiplos tipos de movimento sem armações rígidas ou camadas de restrição externas.
Como o design cuidadoso e a impressão 3D fazem funcionar
Alcançar esse movimento versátil exigiu ajuste cuidadoso da geometria e dos materiais da manga. Os pesquisadores compararam diferentes formas de parede e estratégias de suporte e descobriram que um fole dobrado feito de poliuretano termoplástico flexível, reforçado por camadas longitudinais de “amarração”, fornecia a melhor combinação de resistência e flexibilidade. Eles variaram sistematicamente características como largura da dobra, ângulo da dobra, espessura da parede e o número e espessura das camadas de amarração. Dobramentos mais largos, por exemplo, permitiram extensões maiores, enquanto ângulos de dobra menores melhoravam a geração de força, mas aumentavam a rigidez. Também descobriram que usar um material mais macio melhorou dramaticamente tanto a amplitude de flexão quanto o curso. Para fabricar de forma confiável essas formas intricadas, a equipe desenvolveu uma receita detalhada de impressão 3D para plástico flexível em impressoras do tipo Bowden, abordando desafios como controle de umidade, entupimento do bico, remoção de suportes e temperatura de impressão. Esse processo produziu paredes estanques e peças repetíveis adequadas para fabricação em larga escala.
O que os testes revelam sobre movimento e força
Usando uma plataforma de teste personalizada com sensores precisos e reguladores de pressão, os autores mediram com que força e até que distância a manga podia empurrar, puxar e dobrar. A uma pressão moderada de 130 kilopascais—inferior à de muitos atuadores macios existentes—a manga gerou até 60 newtons de força axial, suficientes para auxiliar de forma significativa o movimento de uma articulação, e estendeu-se cerca de 81 milímetros, além de conseguir contrair 25 milímetros sob vácuo. Na flexão, atingiu ângulos de até 45 graus e produziu 18 newtons de força de flexão. Esses resultados comparam-se favoravelmente com outros atuadores macios omnidirecionais, que frequentemente precisam de pressões muito maiores para obter forças menores e não conseguem contrair ativamente. A equipe também mostrou que seu método de impressão 3D gera atuadores quase idênticos de uma execução para outra e que, com controle por realimentação, a manga pode seguir posições-alvo com precisão submilimétrica e responder de forma confiável em frequências de movimento de baixas a moderadas.
O que isso significa para robôs vestíveis do futuro
Para um público não especialista, a principal conclusão é que este trabalho transforma a ideia de uma “manga muscular” macia e envolvente em uma tecnologia prática e testada. Ao combinar um design interno engenhoso de fole com um processo de impressão 3D cuidadosamente projetado, os pesquisadores criaram um único dispositivo leve que pode dobrar-se em várias direções, estender-se e puxar ativamente de volta, tudo isso com pressão de ar relativamente baixa. Por ser oco e projetado para contornar um membro ou articulação, é especialmente promissor para exoesqueletos robóticos vestíveis, suportes médicos e ferramentas de reabilitação que precisam ser seguros, confortáveis e compactos. Trabalhos futuros irão aperfeiçoar o ajuste da manga ao corpo humano, adicionar sensoriamento incorporado e controles mais inteligentes, e combiná-la com mangas que torcem para criar movimentos ainda mais parecidos com uma tromba, para assistência robótica cotidiana.
Citação: Abboodi, M., Doumit, M. Design, manufacturing, and testing of a novel omnidirectional soft sleeve actuator. Sci Rep 16, 9828 (2026). https://doi.org/10.1038/s41598-026-40604-5
Palavras-chave: robótica macia, exoesqueletos vestíveis, atuadores pneumáticos, TPU impresso em 3D, dispositivos assistivos